MCU系统中Iot RAM的潜在应用

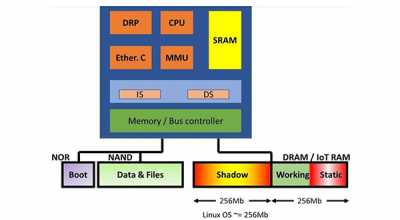
我们来看一下MCU设计中的情况,其中IoT RAM明显比外部DRAM具有优势。在下面的通用MCU图中,工作/静态存储器部分越来越需要扩展。在整个工作空间中使用DRAM会增加系统的功耗,并需要集成刷新控制器。
MCU是Microcontroller Unit(微控制器单元)的缩写,它是一种集成了中央处理器(CPU)、存储器(ROM、RAM)、输入/输出端口(I/O)、定时器(Timer)、串行通信接口(UART、SPI、I2C等)和其他外围设备控制器的单个芯片。MCU通常用于嵌入式系统中,用于控制各种电子设备和系统。
由于其集成度高、体积小、功耗低以及成本相对较低等特点,MCU被广泛应用于各种嵌入式系统中,例如智能家居设备、医疗设备、汽车电子系统、工业自动化等。MCU的选择通常基于应用的需求,如处理性能、功耗、外设接口等因素。
我们来看一下MCU设计中的情况,其中IoT RAM明显比外部DRAM具有优势。在下面的通用MCU图中,工作/静态存储器部分越来越需要扩展。在整个工作空间中使用DRAM会增加系统的功耗,并需要集成刷新控制器。

恩智浦通过发布K32W061和K32W041多协议无线微控制器(MCU)扩大了其产品组合。低功耗MCU专为智能家居和物联网设备而设计,并具有多种低功耗和低无线电功耗模式。
在工业领域用嵌入式,还是用可编程逻辑控制器(PLC)?

Holtek针对电磁炉应用领域,新推出HT45F0058电磁炉Flash MCU。HT45F0058内含PPG硬件抖频功能,使电磁炉工作于高功率时,可以有效减小IGBT反压(VCE)以及降低EMI电磁干扰。减少抗EMI元件成本,并通过EMI标准测试。

MCU内置的12位ADC是否可以直接用于额温枪方案?答案:可以的,而且完全能达到国家对红外温度计的相关标准要求。疫情期间,除口罩外,快速测温的额温枪也成为抢手货,各种优秀的额温枪方案不断出现。

输入口其实可以理解为一个对地电阻和对VDD电阻均为无穷大的端口,它的状态完全由外部电路决定。此脚不用时不能悬空,视工作情况要么接地要么到VDD。

MCU是新能源汽车特有的核心功率电子单元,通过接收VCU的车辆行驶控制指令,控制电动机输出指定的扭矩和转速,驱动车辆行驶。实现把动力电池的直流电能转换为所需的高压交流电、并驱动电机本体输出机械能。同时,MCU具有电机系统故障诊断保护和存储功能。

一切温度高于绝对零度(-273.15℃)的物体都在不停向周围空间辐射红外能量。非接触式温度传感器主要是利用被测物体热辐射而发出红外线,从而方便地测量物体。

3月30日,Holtek新一代高抗干扰能力Enhanced Touch I/O Flash MCU系列,新增系列成员BS83A04C,特别要求低功耗特性,适合应用于需求低功耗的产品、各项家电及消费性产品,如蓝芽耳机、移动电源、智能手环、饮水机、空气清净机、厨房秤等触控按键应用。

只读存储器(Read-only memory, ROM),当然从广义上来讲,也有一些器件,例如Flash,EPROM等等,通过某种手段可以编程的,也属于ROM的范畴的。ROM一般用在一些程序的存储和数据的存储,这里程序多半是比较固定的程序,这里的数据多半是固化的表项,查找表等等不会怎么改变的表项。