什么是单片机的中断响应时间?


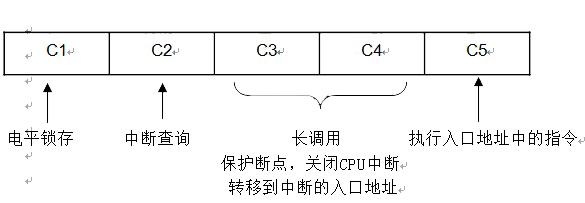
中断响应时间:从外部中断请求有效(外部中断请求标志置1)到转向中断入口地址所需要的响应时间。每个机器周期的S5P2时刻,INTx引脚的电平被锁存到内部寄存器中,待下一个周期查询。
1. 最短时间:中断请求有效,查询后在下一个周期便开始执行一条硬件的子程序的调用(时间是两个周期),然后开始执行服务程序的第一条指令。这样从锁存电平的周期到执行中断服务程序,中间相隔3个机器周期。
2. 最长时间:如果中断信号发生在前面所说的3种情况时,响应时间就要变长:
(1)响应时间取决于正在执行的同级或高级中断的执行时间;
(2)指当前CPU执行的指令是多周期指令,如乘除法指令(4个周期),最坏情况,还要等3个周期。这样响应周期变为3+3=6个周期;
(3)CPU当前执行的指令是RETI或访问IE、IP寄存器时,本指令(1个周期)没有响应,且下一条指令执行完后才能响应,这样附加的等待时间最长不会超过5个周期(1+4)。整个响应为5+3=8个周期。