51的特殊功能寄存器sfr笔记

51系列单片机内部主要有四大功能模块,分别是I/O口模块、中断模块、定时器模块和串口通信模块(串行I/O口)。51开发的重点其实就是对这四个部分进行具体的开发,而其对这四个模块的开发实质则又是能否对每个模块所对应寄存器的正确操纵。
单片机的内部结构可以大概归纳如下图:四大功能模块相关的寄存器又可分为四大部分:
51 单片机是 8 位单片机的经典代表,由英特尔公司在 1980 年推出 MCS - 51 系列单片机后逐渐发展而来。因其结构简单、易上手、成本低等特点,在工业控制、智能仪器仪表、消费电子等领域应用广泛。下面为你详细介绍:
主要特性
结构简单:采用哈佛结构,程序存储器和数据存储器是分开的,指令和数据可以同时访问,提高了处理效率。其核心是一个 8 位的中央处理器(CPU),能够处理 8 位数据。
易于学习:指令系统相对简单,对于初学者来说容易理解和掌握。许多高校和培训机构将其作为单片机入门教学的首选。
成本低廉:芯片价格便宜,开发工具也较为常见且免费或低成本,降低了开发和生产成本,适合各种规模的项目。
丰富的外设资源:内部集成了定时器 / 计数器、串行通信接口、中断系统等基本外设,能够满足大多数小型应用系统的需求。
51系列单片机内部主要有四大功能模块,分别是I/O口模块、中断模块、定时器模块和串口通信模块(串行I/O口)。51开发的重点其实就是对这四个部分进行具体的开发,而其对这四个模块的开发实质则又是能否对每个模块所对应寄存器的正确操纵。
单片机的内部结构可以大概归纳如下图:四大功能模块相关的寄存器又可分为四大部分:

数据传送指令共有29条,数据传送指令一般的操作是把源操作数传送到目的操作数,指令执行完成后,源操作数不变,目的操作数等于源操作数。
如果要求在进行数据传送时,目的操作数不丢失,则不能用直接传送指令,而采用交换型的数据传送指令,数据传送指令不影响标志C,AC和OV,但可能会对奇偶标志P有影响。

在进行应用系统的总体设计时,软件设计和硬件设计应统一考虑,相结合进行。当系统的电路设计定型后,软件的任务也就明确了 ,系统中的软件是根据系统功能要求设计的。
一般地讲,软件的功能可分为两大类。
- 一类是执行软件,它能完成各种实质性的功能,如测量,计算,显示,打印,输出控制等;

用C语言进行MCS51系列单片机程序设计是单片机开发和应用的必然趋势。Keil公司的C51编译器支持经典8051和8051派生产品的版本,通称为Cx51。应该说,Cx51是C语言在MCS51单片机上的扩展,既有C语言的共性,又有它自己的特点。本文介绍的是Cx51程序设计时堆栈的计算方法。
如何确定晶振正常起振?

51单片机的外部中断有两种触发方式可选:电平触发和边沿触发。选择电平触发时,单片机在每个机器周期检查中断源口线,检测到低电平,即置位中断请求标志,向CPU请求中断。选择边沿触发方式时,单片机在上一个机器周期检测到中断源口线为高电平,下一个机器周期检测到低电平,即置位中断标志,请求中断。
这个原理很好理解。但应用时需要特别注意的几点:

定时/计数器结构(T0和T1)
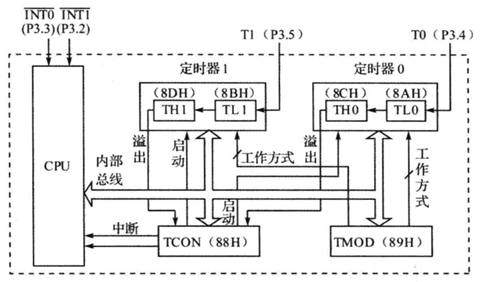
16位寄存器T0、T1分别由TH0、TL0和TH1、TL1四个8位计数器组成

近年来,电子门禁系统发展非常迅速,按照其开门方式可以分为3类:密码识别、卡片识别和生物识别。
无线射频识别技术(RFID)在门禁系统中得到广泛的应用,本例中以使用工作频率为125KHz的射频ID卡和密码识别相结合的门禁系统为例,说明单片机控制门禁系统的原理及应用。

位数指CPU处理的数据的宽度,参与运算的寄存器的数据长度。
如果总线宽度与CPU一次处理的数据宽度相同,则这个宽度就是所说的单片机位数。
如果总线宽度与CPU一次处理的数据宽度不同:

在51单片机的学习过程中,我们经常会发现中断、计数器/定时器、串口是学习单片机的难点,对于初学者来说,这几部分的内容很难理解。