说到STM32的FLSAH,我们的第一反应是用来装程序的,实际上,STM32的片内FLASH不仅用来装程序,还用来装芯片配置、芯片ID、自举程序等等。当然, FLASH还可以用来装数据。
自己收集了一些资料,现将这些资料总结了一下,不想看的可以直接调到后面看怎么操作就可以了。
FLASH分类
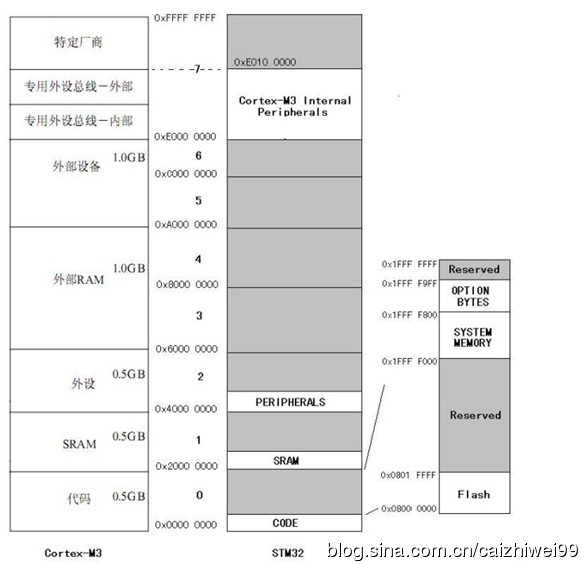
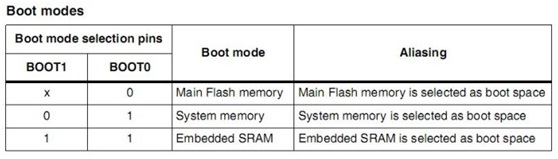
根据用途,STM32片内的FLASH分成两部分:主存储块、信息块。 主存储块用于存储程序,我们写的程序一般存储在这里。 信息块又分成两部分:系统存储器、选项字节。 系统存储器存储用于存放在系统存储器自举模式下的启动程序(BootLoader),当使用ISP方式加载程序时,就是由这个程序执行。这个区域由芯片厂写入BootLoader,然后锁死,用户是无法改变这个区域的。 选项字节存储芯片的配置信息及对主存储块的保护信息。
FLASH的页面
STM32的FLASH主存储块按页组织,有的产品每页1KB,有的产品每页2KB。页面典型的用途就是用于按页擦除FLASH。从这点来看,页面有点像通用FLASH的扇区。
STM32产品的分类
STM32根据FLASH主存储块容量、页面的不同,系统存储器的不同,分为小容量、中容量、大容量、互联型,共四类产品。
小容量产品主存储块1-32KB, 每页1KB。系统存储器2KB。
中容量产品主存储块64-128KB, 每页1KB。系统存储器2KB。
大容量产品主存储块256KB以上, 每页2KB。系统存储器2KB。
互联型产品主存储块256KB以上, 每页2KB。系统存储器18KB。
对于具体一个产品属于哪类,可以查数据手册,或根据以下简单的规则进行区分:
STM32F101xx、STM32F102xx 、STM32F103xx产品,根据其主存储块容量,一定是小容量、中容量、大容量产品中的一种,STM32F105xx、STM32F107xx是互联型产品。
互联型产品与其它三类的不同之处就是BootLoader的不同,小中大容量产品的BootLoader只有2KB,只能通过USART1进行ISP,而互联型产品的BootLoader有18KB,能通过USAT1、4、CAN等多种方式进行ISP。小空量产品、中容量产品的BootLoader与大容量产品相同。
关于ISP与IAP
ISP(In System Programming)在系统编程,是指直接在目标电路板上对芯片进行编程,一般需要一个自举程序(BootLoader)来执行。ISP也有叫ICP(In Circuit Programming)、在电路编程、在线编程。 IAP(In Application Programming)在应用中编程,是指最终产品出厂后,由最终用户在使用中对用户程序部分进行编程,实现在线升级。IAP要求将程序分成两部分:引导程序、用户程序。引导程序总是不变的。IAP也有叫在程序中编程。 ISP与IAP的区别在于,ISP一般是对芯片整片重新编程,用的是芯片厂的自举程序。而IAP只是更新程序的一部分,用的是电器厂开发的IAP引导程序。综合来看,ISP受到的限制更多,而IAP由于是自己开发的程序,更换程序的时候更容易操作。
FPEC
FPEC(FLASH Program/Erase controller 闪存编程/擦除控制器),STM32通过FPEC来擦除和编程FLASH。FPEC使用7个寄存器来操作闪存:
FPEC键寄存器(FLASH_KEYR) 写入键值解锁。
选项字节键寄存器(FLASH_OPTKEYR) 写入键值解锁选项字节操作。
闪存控制寄存器(FLASH_CR) 选择并启动闪存操作。
闪存状态寄存器(FLASH_SR) 查询闪存操作状态。
闪存地址寄存器(FLASH_AR) 存储闪存操作地址。
选项字节寄存器(FLASH_OBR) 选项字节中主要数据的映象。
写保护寄存器(FLASH_WRPR) 选项字节中写保护字节的映象。
键值
为了增强安全性,进行某项操作时,须要向某个位置写入特定的数值,来验证是否为安全的操作,这些数值称为键值。STM32的FLASH共有三个键值:
RDPRT键 = 0x000000A5 用于解除读保护
KEY1 = 0x45670123 用于解除闪存锁
KEY2 = 0xCDEF89AB 用于解除闪存锁
闪存锁
在FLASH_CR中,有一个LOCK位,该位为1时,不能写FLASH_CR寄存器,从而也就不能擦除和编程FLASH,这称为闪存锁。
当LOCK位为1时,闪存锁有效,只有向FLASH_KEYR依次写入KEY1、KEY2后,LOCK位才会被硬件清零,从而解除闪存锁。当LOCK位为1时,对FLASH_KEYR的任何错误写操作(第一次不是KEY1,或第二次不是KEY2),都将会导致闪存锁的彻底锁死,一旦闪存锁彻底锁死,在下一次复位前,都无法解锁,只有复位后,闪存锁才恢复为一般锁住状态。
复位后,LOCK位默认为1,闪存锁有效,此时,可以进行解锁。解锁后,可进行FLASH的擦除编程工作。任何时候,都可以通过对LOCK位置1来软件加锁,软件加锁与复位加锁是一样的,都可以解锁。
主存储块的擦除
主存储块可以按页擦除,也可以整片擦除。
页擦除
主存储块的任何一页都可以通过FPEC的页擦除功能擦除。 建议使用以下步骤进行页擦除:
1.检查FLASH_SR寄存器的BSY位。以确认没有其他正在进行的闪存操作。必须等待BSY位为0,才能继续操作。
2.设置FLASH_CR寄存器的PER位为1。选择页擦除操作。
3.设置FLASH_AR寄存器为要擦除页所在地址,选择要擦除的页。FLASH_AR的值在哪一页范围内,就表示要擦除哪一页。
4.设置FLASH_CR寄存器的STRT位为1,启动擦除操作。
5.等待FLASH_SR寄存器的BSY位变为0,表示操作完成。
6.查询FLASH_SR寄存器的EOP位,EOP为1时,表示操作成功。
7.读出被擦除的页并做验证。擦完后所有数据位都为1。
整片擦除
整片擦除功能擦除整个主存储块,信息块不受此操作影响。 建议使用以下步骤进行整片擦除:
1.检查FLASH_SR寄存器的BSY位,以确认没有其他正在进行的闪存操作。
2.设置FLASH_CR寄存器的MER位为1。选择整片擦除操作。
3.设置FLASH_CR寄存器的STRT位为1。启动整片擦除操作。
4.等待FLASH_SR寄存器的BSY位变为0,表示操作完成。
5.查询FLASH_SR寄存器的EOP位,EOP为1时,表示操作成功。
6.读出所有页并做验证。擦完后所有数据位都为1。
主存储块的编程
对主存储块编程每次可以写入16位。当FLASH_CR寄存器的PG位为1时,在一个闪存地址写入一个半字(16位)将启动一次编程;写入任何非半字的数据,FPEC都会产生总线错误。在编程过程中(BSY位为1时),任何读写闪存的操作都会使CPU暂停,直到此次闪存编程结束。
建议使用如下步骤对主存储块进行编:
1.检查FLASH_SR寄存器的BSY位,以确认没有其他正在进行的编程操作。
2.设置FLASH_CR寄存器的PG位为1。选择编程操作。
3.在指定的地址写入要编程的半字。直接用指针写。
4.等待FLASH_SR寄存器的BSY位变为0,表示操作完成。
5.查询FLASH_SR寄存器的EOP位,EOP为1时,表示操作成功。
6.读出写入的地址并验证数据。
关于主存储块擦除编程操作的一些疑问
1. 为什么每次都要检查BSY位是否为0?
因为BSY位为1时,不能对任何FPEC寄存器执行写操作,所以必须要等BSY位为0时,才能执行闪存操作。
2. 如果没有擦除就进行编程,会出现什么结果?
STM32在执行编程操作前,会先检查要编程的地址是否被擦除,如果没有,则不进行编程,并置FLASH_SR寄存器的PGERR位为1。唯一例外的是,当要编程的数据为0X0000时,即使未擦除,也会进行编程,因为0X0000即使擦除也可以正确编程。
3. 为什么操作后要读出数据并验证?
STM32在某些特殊情况下(例如FPEC被锁住),可能根本就没有执行所要的操作,仅通过寄存器无法判断操作是否成功。所以,保险起见,操作后都要读出所有数据检查。
4. 等待BSY位为1的时间以多少为合适?
请参考STM32固件库中的数据。
5. FLASH编程手册上说进行闪存操作(擦除或编程)时,必须打开内部的RC振荡器(HSI),是不是一定要用HIS进行闪存的擦除及编程操作?
对于这点,我的理解是,进行闪存操作时,必须要保证HIS没有被关闭,但是操作时的系统仍然可以是HSE时钟。STM32复位后,HIS默认是开的,只要你不为了低功耗去主动关闭它,则用什么时钟都可以进行闪存操作的。我所编的程序也验证了这一点。
来源:stm社区