Cortex-M3内核支持256个中断,其中包含了16个内核中断(异常)和240个外部中断,并且具有256级的可编程中断设置。但是,STM32并没有使用CM3内核的全部东西,而是只用了它的一部分。STM32有84个中断,包括16个内核中断(异常)和68个可屏蔽中断,具有16级可编程的中断优先级。而STM32F103系列上面,16个内核中断(异常)不变,而可屏蔽中断只有60个(在107系列才有68个)。
注意一下:CM3的外部中断和STM32的外部中断不是一个概念。CM3:除了内核异常之外的都是外部中断;STM32:外部中断EXTI只有6个
其实,内核中断也叫内核异常。
- 中断是指系统停止当前正在运行的程序转而其他服务,可能是程序接收了比自身高优先级的请求,或者是人为设置中断,中断是属于正常现象。
- 异常是指由于cpu本身故障、程序故障或者请求服务等引起的错误,异常属于不正常现象。
因此,下面就直接介绍一下STM32F103系列的16个内核中断(异常)、60个中断:

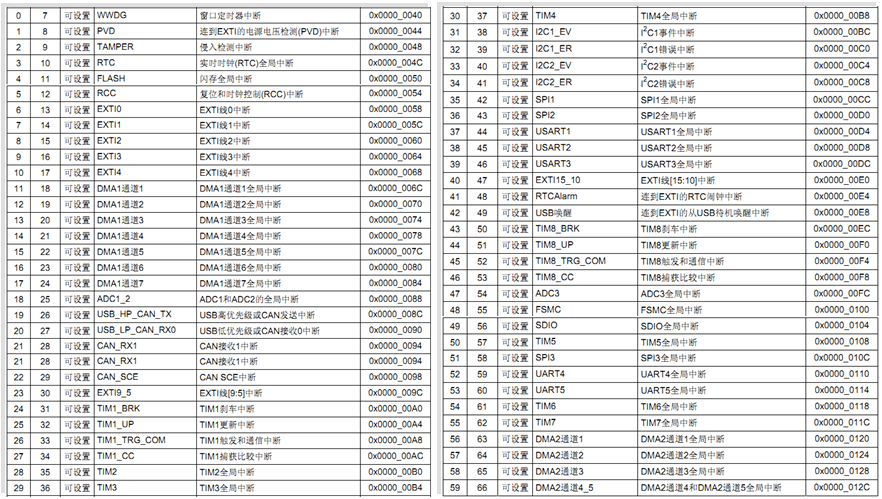
在中断向量表中从优先级7-66(中断号从0-59)代表着STM32F103的60个中断。优先级号越小,优先级越高。当表中的某处异常或中断被触发,程序计数器指针(PC)将跳转到该异常或中断的地址处执行,该地址处存放这一条跳转指令,跳转到该异常或中断的服务函数处执行相应的功能。因此,异常和中断向量表只能用汇编语言编写。
在MDK中,有标准的异常和中断向量表文件可以使用(startup_stm32f10x_hd.s),在其中标明了中断处理函数的名称,不能随意定义。而中断通道NVIC_IRQChannel(即IRQn_Type类型)是在stm32f10x.h文件中进行了宏定义。
什么是NVIC?即嵌套向量中断控制器(Nested Vectored Interrupt Controller)。CM3的中有一个强大而方便的NVIC,它是属于Cortex内核的器件,中断向量表中60个中断都由它来处理。NVIC是Cortex-M3核心的一部分,关于它的资料不在《STM32的技术参考手册》中,应查阅ARM公司的《Cortex-M3技术参考手册》。Cortex-M3的向量中断统一由NVIC管理。
NVIC的核心功能是中断优先级分组、中断优先级的配置、读中断请求标志、清除中断请求标志、使能中断、清除中断等,它控制着STM32中断向量表中中断号为0-59的60个中断!!外部中断信号从核外发出,信号最终要传递到NVIC(嵌套向量中断控制器)。NVIC跟内核紧密耦合,它控制着整个芯片中断的相关功能。
STM32中断优先级分组
中断优先级分组寄存器
这60个中断,怎么管理呢?这就涉及到STM32的中断分组。STM32可以将中断分成5个组,分别为组0-4;同时,对每个中断设置一个抢占优先级和响应优先级。分组配置是由SCB->AIRCR寄存器的bit10-8来定义的。SCB->AIRCR是在哪里的呢?由于这是CM3内核定义的,在文档《Cortex-M3权威指南(中文)》中能查找到。
具体的分配关系如下所示:

其中AIRCR寄存器来确定是用哪种分组,IP寄存器是相对应于那种分组抢占优先级和响应优先级的分配比例。例如组设置成3,那么此时所有的60个中断优先寄存器高4位中的最高3位是抢占优先级,低1位为响应优先级。CM3中定义了8个Bit用于设置中断源的优先级,而STM32只选用其中的4个Bit。
抢占优先级的级别高于响应优先级,而数值越小所代表的的优先级越高。
介绍一下抢占优先级、响应优先级的区别:
① 高优先级的抢占优先级是可以打断正在进行的低抢占优先级中断的;
② 抢占优先级相同的中断,高响应优先级不可以打断低响应优先级的中断;
③ 抢占优先级相同的中断,当两个中断同时发生的情况下,哪个响应优先级高,哪个先执行;
④ 如果两个中断的抢占优先级和响应优先级都是一样的话,则看哪个中断先发生就先执行;
除此之外有两点需要注意:
① 打断的情况只会与抢占优先级有关, 和响应优先级无关!
② 一般情况下,系统代码执行过程中,只设置一次中断优先级分组,比如分组2,设置好分组之后一般不会再改变分组。随意改变分组会导致中断管理混乱,程序出现意想不到的执行结果。
中断优先级分组库函数
CM3核的优先级分组方式,使用的设置函数NVIC_SetPriorityGrouping()。
接下来介绍STM32的中断优先级分组函数NVIC_PriorityGroupConfig(),用来进行中断分组设置的,此函数是在固件库下misc.c文件中(文件目录是:
STM32F10x_StdPeriph_Lib_V3.5.0\Libraries\STM32F10x_StdPeriph_Driver\src\misc.c):
void NVIC_PriorityGroupConfig(uint32_t NVIC_PriorityGroup)
{
/* Check the parameters */
assert_param(IS_NVIC_PRIORITY_GROUP(NVIC_PriorityGroup));
/* Set the PRIGROUP[10:8] bits according to NVIC_PriorityGroup value */
SCB->AIRCR = AIRCR_VECTKEY_MASK | NVIC_PriorityGroup;
}
函数的参数的取值,是在同文件中进行宏定义的:
#define NVIC_PriorityGroup_0 ((uint32_t)0x700) /*!< 0 bits for pre-emption priority
4 bits for subpriority */
#define NVIC_PriorityGroup_1 ((uint32_t)0x600) /*!< 1 bits for pre-emption priority
3 bits for subpriority */
#define NVIC_PriorityGroup_2 ((uint32_t)0x500) /*!< 2 bits for pre-emption priority
2 bits for subpriority */
#define NVIC_PriorityGroup_3 ((uint32_t)0x400) /*!< 3 bits for pre-emption priority
1 bits for subpriority */
#define NVIC_PriorityGroup_4 ((uint32_t)0x300) /*!< 4 bits for pre-emption priority
0 bits for subpriority */
STM32中断优先级管理
中断优先级设置寄存器
分组设置好了之后,怎么设置单个中断的抢占优先级和响应优先级?
MDK为与NVIC相关的寄存器定义了如下的结构体,控制着中断向量表中60个中断(由于与中断内核有关,定义在core_cm3.h文件中):
typedef struct
{
__IO uint32_t ISER[8]; /*!< Offset: 0x000 Interrupt Set Enable Register */
uint32_t RESERVED0[24];
__IO uint32_t ICER[8]; /*!< Offset: 0x080 Interrupt Clear Enable Register */
uint32_t RSERVED1[24];
__IO uint32_t ISPR[8]; /*!< Offset: 0x100 Interrupt Set Pending Register */
uint32_t RESERVED2[24];
__IO uint32_t ICPR[8]; /*!< Offset: 0x180 Interrupt Clear Pending Register */
uint32_t RESERVED3[24];
__IO uint32_t IABR[8]; /*!< Offset: 0x200 Interrupt Active bit Register */
uint32_t RESERVED4[56];
__IO uint8_t IP[240]; /*!< Offset: 0x300 Interrupt Priority Register (8Bit wide) */
uint32_t RESERVED5[644];
__O uint32_t STIR; /*!< Offset: 0xE00 Software Trigger Interrupt Register */
} NVIC_Type;
我们依次介绍一下这些寄存器:
先介绍几个寄存器组长度为8,这些寄存器是32位寄存器。由于STM32只有60个可屏蔽中断,8个32位寄存器中只需要2个就有64位了,每1位控制一个中断。
- ISER[8](Interrupt Set-Enable Registers):中断使能寄存器。其中只使用到了ISER[0]和ISER[1],ISER[0]的bit0~bit31分别对应中断0~31。ISER[1]的bit0~27对应中断32~59。要使能某个中断,就必须设置相应的ISER位为1,使该中断被使能(这仅仅是使能,还要配合中断分组、屏蔽、I/O口映射等设置才算完整)。具体每一位对应哪个中断参考stm32f103x.h里面第140行。
- ICER[8](Interrupt Clear-Enable Registers):中断移除寄存器。该寄存器的作用于ISER相反。这里专门设置一个ICER来清除中断位,而不是向ISER位写0,是因为NVIC的寄存器写1有效,写0无效。
- ISPR[8](Interrupt Set-Pending Registers):中断挂起控制寄存器。通过置1可以将正在进行的中断挂起,执行同级或者更高级别的中断。写0无效。
- ICPR[8](Interrupt Clear-Pending Registers):中断解挂控制寄存器。通过置1可以将正在挂起的中断解挂。写0无效。
- IABR[8](Interrupt Active-Bit Registers):中断激活标志位寄存器。这是一个只读寄存器,可以知道当前在执行的中断是哪一个(为1),在中断执行完后硬件自动清零。
最后,介绍一个寄存器组长度为240,这个寄存器为8位寄存器。240个8位寄存器,每个中断使用一个寄存器来确定优先级。由于CM3由240个外部中断,所以这个寄存器组的数目就是240(注意与上面寄存器的区别,一个是一个寄存器控制一个,一个是一位控制一个)。
- IP[240](Interrupt Priority Registers):中断优先级控制的寄存器。这是用来控制每个中断的优先级。由于STM32F10x系列一共60个可屏蔽中断,故使用IP[59]~IP[0]。其中每个IP寄存器的高4位[7:4]用来设置抢占和响应优先级(根据分组),低4位没有用到。而两个优先级各占几个位又要由上面讲到的中断优先级分组决定。
中断优先级设置库函数
接下来介绍如何使用库函数实现中断优先级管理,这里使用NVIC_Init()函数来进行对每个中断优先级的设置(misc.c文件中):
void NVIC_Init(NVIC_InitTypeDef* NVIC_InitStruct)
{
uint32_t tmppriority = 0x00, tmppre = 0x00, tmpsub = 0x0F;
/* Check the parameters */
assert_param(IS_FUNCTIONAL_STATE(NVIC_InitStruct->NVIC_IRQChannelCmd));
assert_param(IS_NVIC_PREEMPTION_PRIORITY(NVIC_InitStruct->NVIC_IRQChannelPreemptionPriority));
assert_param(IS_NVIC_SUB_PRIORITY(NVIC_InitStruct->NVIC_IRQChannelSubPriority));
if (NVIC_InitStruct->NVIC_IRQChannelCmd != DISABLE)
{
/* Compute the Corresponding IRQ Priority --------------------------------*/
tmppriority = (0x700 - ((SCB->AIRCR) & (uint32_t)0x700))> 0x08;
tmppre = (0x4 - tmppriority);
tmpsub = tmpsub >> tmppriority;
tmppriority = (uint32_t)NVIC_InitStruct->NVIC_IRQChannelPreemptionPriority << tmppre;
tmppriority |= NVIC_InitStruct->NVIC_IRQChannelSubPriority & tmpsub;
tmppriority = tmppriority << 0x04;
NVIC->IP[NVIC_InitStruct->NVIC_IRQChannel] = tmppriority;
/* Enable the Selected IRQ Channels --------------------------------------*/
NVIC->ISER[NVIC_InitStruct->NVIC_IRQChannel >> 0x05] =
(uint32_t)0x01 << (NVIC_InitStruct->NVIC_IRQChannel & (uint8_t)0x1F);
}
else
{
/* Disable the Selected IRQ Channels -------------------------------------*/
NVIC->ICER[NVIC_InitStruct->NVIC_IRQChannel >> 0x05] =
(uint32_t)0x01 << (NVIC_InitStruct->NVIC_IRQChannel & (uint8_t)0x1F);
}
}
其中,NVIC_InitTypeDef为一个结构体,它的成员变量为:
typedef struct
{
uint8_t NVIC_IRQChannel; /*!< Specifies the IRQ channel to be enabled or disabled.
This parameter can be a value of @ref IRQn_Type
(For the complete STM32 Devices IRQ Channels list, please
refer to stm32f10x.h file) */
uint8_t NVIC_IRQChannelPreemptionPriority; /*!< Specifies the pre-emption priority for the IRQ channel
specified in NVIC_IRQChannel. This parameter can be a value
between 0 and 15 as described in the table @ref NVIC_Priority_Table */
uint8_t NVIC_IRQChannelSubPriority; /*!< Specifies the subpriority level for the IRQ channel specified
in NVIC_IRQChannel. This parameter can be a value
between 0 and 15 as described in the table @ref NVIC_Priority_Table */
FunctionalState NVIC_IRQChannelCmd; /*!< Specifies whether the IRQ channel defined in NVIC_IRQChannel
will be enabled or disabled.
This parameter can be set either to ENABLE or DISABLE */
} NVIC_InitTypeDef;
NVIC_InitTypeDef结构体有4个成员变量:
① NVIC_IRQChannel:定义初始化的是哪一个中断,这个可以在stm32f10x.h文件中查到每个中断对应的名字,如USART1_IRQn;
② NVIC_IRQChannelPreemptionPriority:定义此中断的抢占优先级别;
③ NVIC_IRQChannelSubPriority:定义此中断的响应优先级别;
④ NVIC_IRQChannelCmd:该中断是否使能。
其实我们看NVIC_Init()函数内部使能中断,也是通过ISER寄存器配置的。这与我么之前的内容并不矛盾。函数内部使用NVIC->ISER,而NVIC是一个宏定义,
#define NVIC ((NVIC_Type *) NVIC_BASE) /*!< NVIC configuration struct */
也就是直接操作结构体来实现操作ISER寄存器。
比如,使能串口1中断,抢占优先级为1,响应优先级为2,初始化的方法为:
NVIC_InitTypeDef NVIC_InitStructure;
NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;//串口1中断
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=1 ;// 抢占优先级为1
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 2;// 子优先级位2
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;//IRQ通道使能
NVIC_Init(&NVIC_InitStructure); //根据上面指定的参数初始化NVIC寄存器
总结与分析
最后总结一下中断优先级设置的步骤:
1、系统运行后先设置中断优先级分组。调用函数:
void NVIC_PriorityGroupConfig(uint32_t NVIC_PriorityGroup);
整个系统执行过程中,只设置一次中断分组;
2、针对每个中断,设置对应的抢占优先级和响应优先级:
void NVIC_Init(NVIC_InitTypeDef* NVIC_InitStruct);
来源:CSDN,作者:Yngz_Miao
原文:https://blog.csdn.net/qq_38410730/article/details/79829983
版权声明:本文为博主原创文章,转载请附上博文链接!