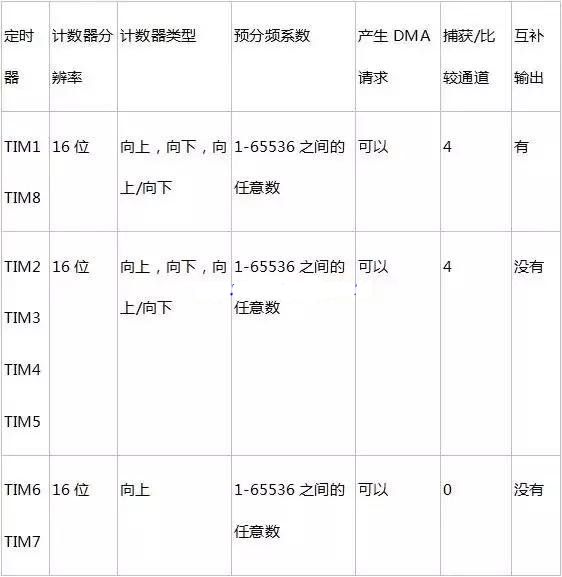
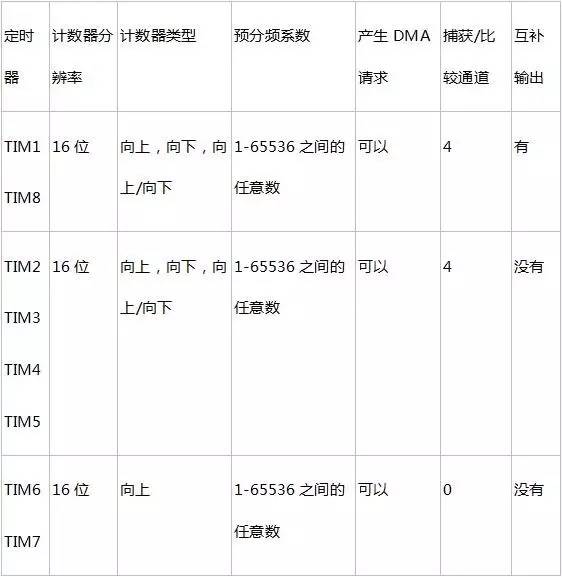
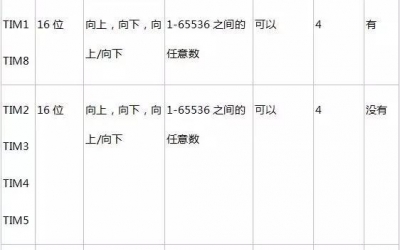
STM32中一共有11个定时器,其中2个高级控制定时器,4个普通定时器和2个基本定时器,以及2个看门狗定时器和1个系统嘀嗒定时器。(TIM1和TIM8是能够产生3对PWM互补输出的高级登时其,常用于三相电机的驱动,时钟由APB2的输出产生;TIM2-TIM5是普通定时器;TIM6和TIM7是基本定时器,其时钟由APB1输出产生)
本实验要实现的功能是:用普通定时器TIM2每一秒发生一次更新事件,进入中断服务程序翻转LED1的状态。
预备知识:
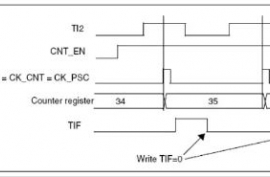
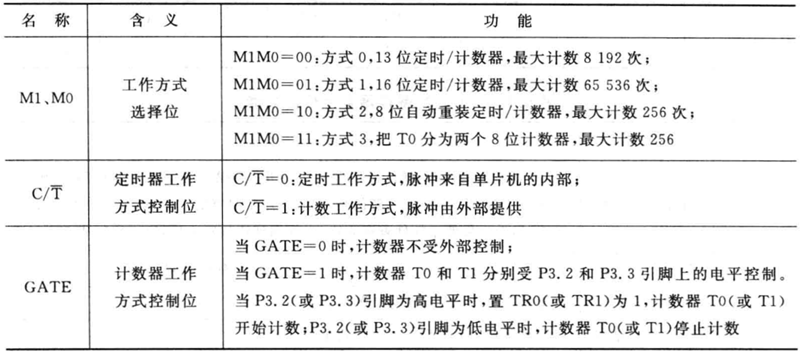
① STM32通用定时器TIM2是16位自动重装载计数器。
② 向上计数模式:从0开始计数,计到自动装载寄存器(TIMx_ARR)中的数值时,清0,依次循环。
需要弄清楚的两个问题:
1. 计数器的计数频率是什么?
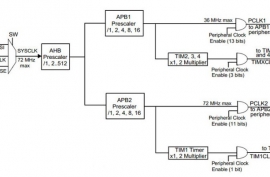
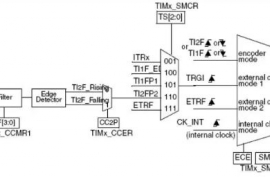
这个问题涉及到RCC时钟部分,如下图所示:
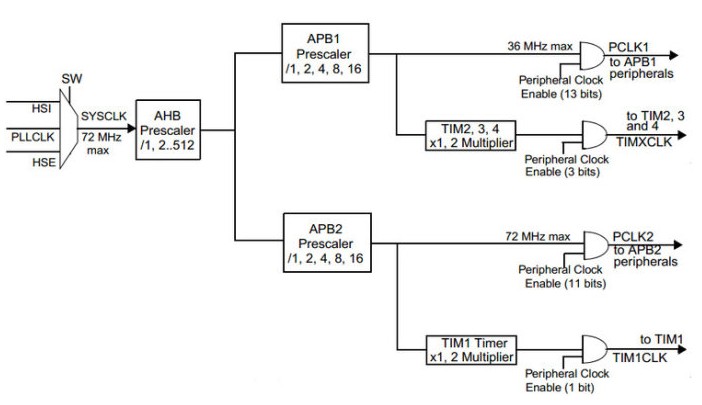
定时器的时钟不是直接来自APB1或APB2,而是来自于输入为APB1或APB2的一个倍频器。
下面以定时器2~7的时钟说明这个倍频器的作用:当APB1的预分频系数为1时,这个倍频器不起作用,定时器的时钟频率等于APB1的频率;当APB1的预分频系数为其它数值(即预分频系数为2、4、8或16)时,这个倍频器起作用,定时器的时钟频率等于APB1的频率两倍。
假定AHB=36MHz,因为APB1允许的最大频率为36MHz,所以APB1的预分频系数可以取任意数值;当预分频系数=1时,APB1=36MHz,TIM2~7的时钟频率=36MHz(倍频器不起作用);当预分频系数=2时,APB1=18MHz,在倍频器的作用下,TIM2~7的时钟频率=36MHz。
有人会问,既然需要TIM2~7的时钟频率=36MHz,为什么不直接取APB1的预分频系数=1?答案是:APB1不但要为TIM2~7提供时钟,而且还要为其它外设提供时钟;设置这个倍频器可以在保证其它外设使用较低时钟频率时,TIM2~7仍能得到较高的时钟频率。
再举个例子:当AHB=72MHz时,APB1的预分频系数必须大于2,因为APB1的最大频率只能为36MHz。如果APB1的预分频系数=2,则因为这个倍频器,TIM2~7仍然能够得到72MHz的时钟频率。能够使用更高的时钟频率,无疑提高了定时器的分辨率,这也正是设计这个倍频器的初衷。
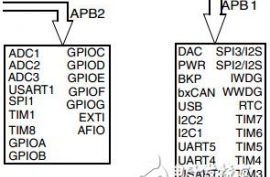
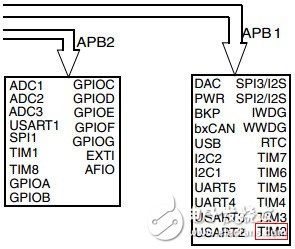
注意:APB1和APB2上挂的外设如图所示:
定时器的计数频率有个公式:
TIMx_CLK = CK_INT / (TIM_Prescaler + 1)
其中:TIMx_CLK 定时器的计数频率
CK_INT 内部时钟源频率(APB1的倍频器送出时钟)
TIM_Prescaler 用户设定的预分频系数,取值范围0~65535。
例如:RCC中AHB=72MHZ、APB1=36MHZ、APB2=72MHZ,则CK_INT=72MKZ。
2. 如何计算定时时间?
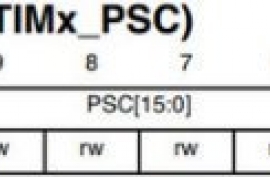
上述公式中TIM_Prescaler涉及到寄存器TIMx_PSC


如果TIM_Prescaler设为36000,由上面公式可知:
定时器的计数频率 TIMx_CLK = 72MKZ / 36000 = 2000HZ,则定时器的计数周期=1/2000HZ=0.5ms.
如果要定时1秒,则需要计数2000次,这也是自动重装载的值。又涉及到TIMx_ARR


只要上述两个问题搞清楚了,剩下的就是设置相应寄存器的对应位了。
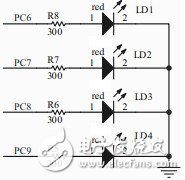
LED硬件连接如下图所示:高电平点亮LED。
第一步:配置系统时钟。见STM32F103x RCC寄存器配置
除此之外,还需将GPIO和TIM2外设时钟打开。
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOC, ENABLE);
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE);
注意:TIM2是挂在APB1上的,打开时钟时别写错了,调用RCC_APB1PeriphClockCmd函数,而不是RCC_APB2PeriphClockCmd。
第二步:配置中断向量表。见stm32_exti(含NVIC)配置及库函数讲解
void NVIC_Configuration(void)
{
NVIC_InitTypeDef NVIC_InitStructure;
#ifdef VECT_TAB_RAM
NVIC_SetVectorTable(NVIC_VectTab_RAM, 0x0);
#else
NVIC_SetVectorTable(NVIC_VectTab_FLASH, 0x0);
#endif
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_1);
NVIC_InitStructure.NVIC_IRQChannel = TIM2_IRQChannel;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 4;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
}
该函数完成两个功能
1. 决定将程序下载到RAM中还是FLASH中
2. 配置中断分组。(NVIC中断分组只能设置一次)
3. 选择中断通道号,抢占式优先级和响应优先级,使能中断
第三步:配置GPIO的模式。输入模式还是输出模式。点亮LED已讲过,见STM32_GPIO配置及库函数讲解——LED跑马灯
void GPIO_Configuration(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_Init(GPIOC, &GPIO_InitStructure);
}
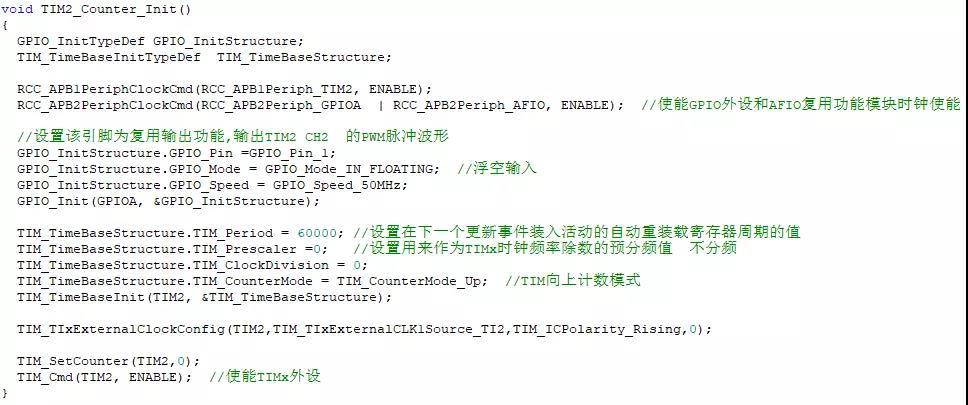
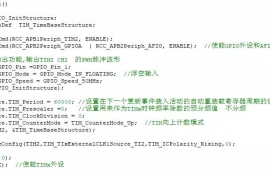
第四步:定时器配置,本章重点!
void TIM2_Configuration(void)
{
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
//重新将Timer设置为缺省值
TIM_DeInit(TIM2);
//采用内部时钟给TIM2提供时钟源
TIM_InternalClockConfig(TIM2);
//预分频系数为36000-1,这样计数器时钟为72MHz/36000 = 2kHz
TIM_TimeBaseStructure.TIM_Prescaler = 36000 - 1;
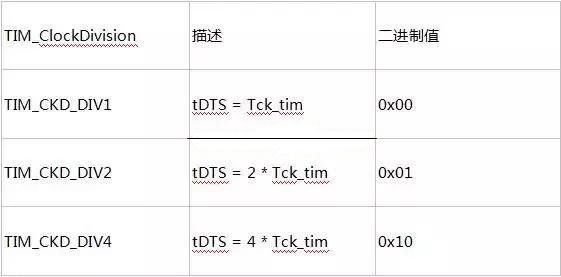
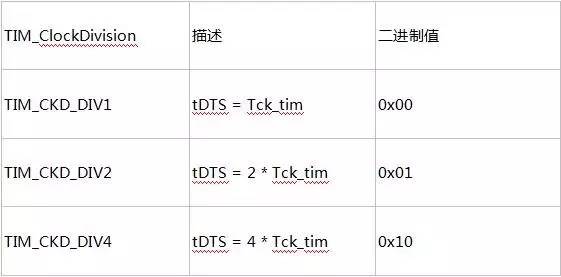
//设置时钟分割
TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1;
//设置计数器模式为向上计数模式
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;
//设置计数溢出大小,每计2000个数就产生一个更新事件
TIM_TimeBaseStructure.TIM_Period = 2000;
//将配置应用到TIM2中
TIM_TimeBaseInit(TIM2, &TIM_TimeBaseStructure);
//清除溢出中断标志
TIM_ClearFlag(TIM2, TIM_FLAG_Update);
//禁止ARR预装载缓冲器
TIM_ARRPreloadConfig(TIM2, DISABLE); //预装载寄存器的内容被立即传送到影子寄存器
//开启TIM2的中断
TIM_ITConfig(TIM2, TIM_IT_Update, ENABLE);
}
该函数完成两个功能
1. 设定预分频系数TIM_Prescaler = 36000 - 1
2. 设定自动重装载值TIM_Period = 2000
注意:上述只是配置好了TIM2,但还没有开启TIM2。
下面给出timer2.c的完整代码
#include “stm32f10x_lib.h”
void RCC_Configuration(void);
void NVIC_Configuration(void);
void GPIO_Configuration(void);
void TIM2_Configuration(void);
void Delay(vu32 nCount);
int main(void)
{
#ifdef DEBUG
debug();
#endif
RCC_Configuration();
NVIC_Configuration();
GPIO_Configuration();
TIM2_Configuration();
TIM_Cmd(TIM2, ENABLE); //开启定时器2
while (1)
{
}
}
void RCC_Configuration(void)
{
ErrorStatus HSEStartUpStatus;
RCC_DeInit();
RCC_HSEConfig(RCC_HSE_ON);
HSEStartUpStatus = RCC_WaitForHSEStartUp()
if (HSEStartUpStatus == SUCCESS)
{
FLASH_PrefetchBufferCmd(FLASH_PrefetchBuffer_Enable);
FLASH_SetLatency(FLASH_Latency_2);
RCC_HCLKConfig(RCC_SYSCLK_Div1);
RCC_PCLK2Config(RCC_HCLK_Div1);
RCC_PCLK1Config(RCC_HCLK_Div2);
RCC_PLLConfig(RCC_PLLSource_HSE_Div1, RCC_PLLMul_9);
RCC_PLLCmd(ENABLE);
while(RCC_GetFlagStatus(RCC_FLAG_PLLRDY) == RESET) {}
RCC_SYSCLKConfig(RCC_SYSCLKSource_PLLCLK);
while(RCC_GetSYSCLKSource() != 0x08) {}
}
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOC, ENABLE);
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE);
}
void NVIC_Configuration(void)
{
NVIC_InitTypeDef NVIC_InitStructure;
#ifdef VECT_TAB_RAM
NVIC_SetVectorTable(NVIC_VectTab_RAM, 0x0);
#else
NVIC_SetVectorTable(NVIC_VectTab_FLASH, 0x0);
#endif
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_1);
NVIC_InitStructure.NVIC_IRQChannel = TIM2_IRQChannel;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 4;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
}
void GPIO_Configuration(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_Init(GPIOC, &GPIO_InitStructure);
}
void TIM2_Configuration(void)
{
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
//重新将Timer设置为缺省值
TIM_DeInit(TIM2);
//采用内部时钟给TIM2提供时钟源
TIM_InternalClockConfig(TIM2);
//预分频系数为36000-1,这样计数器时钟为72MHz/36000 = 2kHz
TIM_TimeBaseStructure.TIM_Prescaler = 36000 - 1;
//设置时钟分割
TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1;
//设置计数器模式为向上计数模式
转自:电子发烧友网