一、原理
1、红外发射协议
红外通信的协议有很多种。这个实验使用的是NEC协议。这个协议采用PWM的方法进行调制,利用脉冲宽度来表示 0 和 1 。
NEC 遥控指令的数据格式为:同步码头、地址码、地址反码、控制码、控制反码。同步码由一个 9ms 的低电平和一个 4.5ms 的高电平组成,地址码、地址反码、控制码、控制反码均是 8 位数据格式。按照低位在前,高位在后的顺序发送。采用反码是为了增加传输的可靠性。因此,每帧的数据为 32 位,包括地址码,地址反码,控制码,控制反码。反码可用于解码时进行校验比对。
NEC码的位定义:一个脉冲对应 560us 的连续载波,一个逻辑 1 传输需要 2.25ms(560us 脉冲+1680us 低电平),一个逻辑 0 的传输需要 1.125ms(560us 脉冲+560us 低电平)。而遥控接收头在收到脉冲的时候为低电平,在没有脉冲的时候为高电平,这样,在接收头端收到的信号为:逻辑 1 应该是 560us 低+1680us 高,逻辑 0 应该是 560us 低+560us 高。
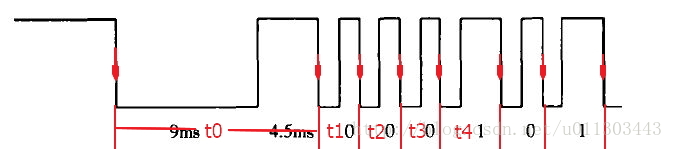
红外数据的波形如下图:包括一个同步头和 32 帧数据。
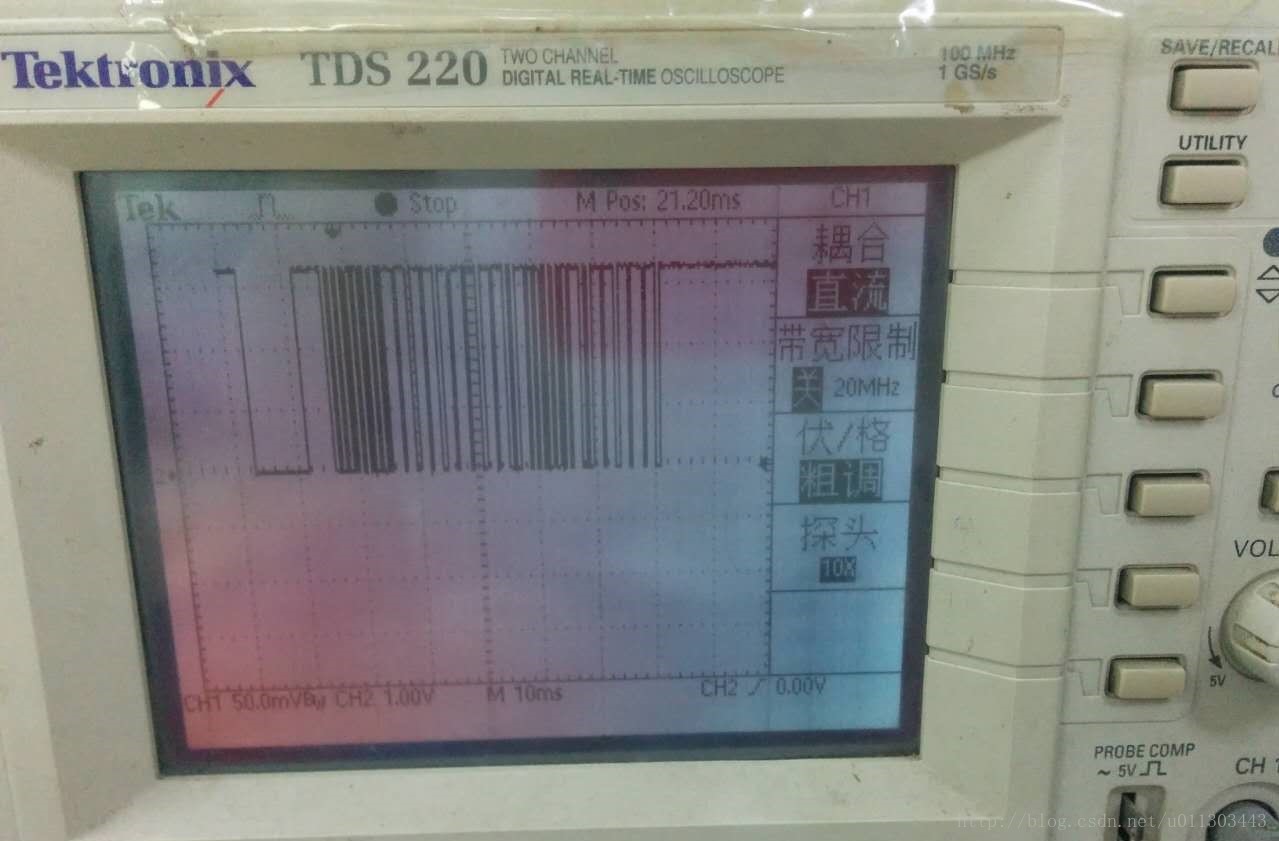
下图可看出,同步头为 9ms 低电平加上 4.5ms 高电平,控制码为 8 个 0,控制反码为 8 个 1。
2、定时器计数
定时器就是按照一个特定的频率对计数值进行加一或减一操作,当数值溢出时则产生一个标志或中断。这里是用定时器计数产生一个周期性的中断。
3、实现方法
利用定时器记录两个下降沿之间的时间,通过该时间判断是否是同步头信息、数据 1 或者数据 0。当检测到同步头,开始记录 32 个数据的时间值。
二、实现
1、配置 GPIO 口下降沿触发中断
示例代码中使用 PA7 管脚,配置为上拉输入模式。
选择下降沿触发,是因为红外接收管默认情况下保持高电平,接收到数据时从高电平转变为低电平。
中断源选择为 EXTI_Line7 ,在库函数中对该中断源定义的服务函数为 EXTI9_5_IRQHandler(),也就是说外部中断 5 到 9 是 共用一个中断服务函数的。
配置代码如下:
void IR_Pin_init()
{
GPIO_InitTypeDef GPIO_InitStructure;
EXTI_InitTypeDef EXTI_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA|RCC_APB2Periph_AFIO,ENABLE);
GPIO_InitStructure.GPIO_Pin=GPIO_Pin_7;
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_IPU;
GPIO_Init(GPIOA,&GPIO_InitStructure);
EXTI_ClearITPendingBit(EXTI_Line7);
GPIO_EXTILineConfig(GPIO_PortSourceGPIOA, GPIO_PinSource7);
EXTI_InitStructure.EXTI_Line=EXTI_Line7;
EXTI_InitStructure.EXTI_Mode=EXTI_Mode_Interrupt;
EXTI_InitStructure.EXTI_Trigger=EXTI_Trigger_Falling;
EXTI_InitStructure.EXTI_LineCmd=ENABLE;
EXTI_Init(&EXTI_InitStructure);
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_1);
NVIC_InitStructure.NVIC_IRQChannel = EXTI9_5_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
}2、配置定时器计数值
定时器使用的是 TIM2 通用定时器,模式为向上计数。在该模式中,计数器从 0 计数到自动加载值 (TIMx_ARR计数器的内容) ,然后重新从 0 开始计数并且产生一个计数器溢出事件。
示例函数接收两个参数,分别为预分频器的值和自动加载值。通过调整这两个参数,可以灵活地改变定时器的计数周期。例如在 TIM2 的默认时钟源 PCLK1 为96MHz时,使用语句 Tim2_UPCount_Init(SystemCoreClock/1000000-1,100-1); //0.1ms 进行初始化,可以每 0.1ms 产生一次中断。
示例代码如下:
void Tim2_UPCount_Init(u16 Prescaler,u16 Period)
{
TIM_TimeBaseInitTypeDef TIM_StructInit;
NVIC_InitTypeDef NVIC_StructInit;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE);
TIM_StructInit.TIM_Period=Period;
TIM_StructInit.TIM_Prescaler=Prescaler;
TIM_StructInit.TIM_ClockDivision=TIM_CKD_DIV1;
TIM_StructInit.TIM_CounterMode=TIM_CounterMode_Up;
TIM_StructInit.TIM_RepetitionCounter=0;
TIM_TimeBaseInit(TIM2, &TIM_StructInit);
TIM_ITConfig(TIM2, TIM_IT_Update, ENABLE);
TIM_Cmd(TIM2, ENABLE);
TIM_ClearFlag(TIM2, TIM_FLAG_Update);
NVIC_StructInit.NVIC_IRQChannel=TIM2_IRQn;
NVIC_StructInit.NVIC_IRQChannelCmd=ENABLE;
NVIC_StructInit.NVIC_IRQChannelPreemptionPriority=0;
NVIC_StructInit.NVIC_IRQChannelSubPriority=1;
NVIC_Init(&NVIC_StructInit);
}3、定时器中断函数统计时间
如上所说,定时器每 0.1ms 计数完成,产生中断,在中断函数中对标志位 ucTim2Flag 加 1,意味着时间过去了 0.1ms。
时间标志位原型为 uint16_t ucTim2Flag; 。
示例代码如下:
void TIM2_IRQHandler(void)
{
TIM_ClearITPendingBit(TIM2, TIM_IT_Update);
ucTim2Flag++;
}
4、GPIO 中断函数中接收 32 位数据
在下降沿触发的 IO 口中断函数中,需要实现统计两个下降沿之间的时间,并将其记录在数组中。
下降沿第一次触发时,清除当前定时器中的计数值,以便统计时间。之后每一次下降沿触发就记录下当前计数值,然后再对其清零。如果该时间在同步头的时间区间内,对索引进行清零,表示重新开始接收数据。
完整接收同步头和 32 个数据之后,表示接收完成。
示例代码如下:
uint8_t irdata[33]; //用于记录两个下降沿之间的时间
bool receiveComplete; //接收完成标志位
uint8_t idx; //用于索引接收到的数值
bool startflag; //表示开始接收
void EXTI9_5_IRQHandler(void)
{
uint16_t ir_time;
if(startflag)
{
ir_time = ucTim2Flag;
if(ucTim2Flag < 150 && ucTim2Flag >= 50 ) // 接收到同步头
{
idx=0; // 数组下标清零
}
irdata[idx] = ucTim2Flag; // 获取计数时间
ucTim2Flag = 0; // 清零计数时间,以便下次统计
idx++; // 接收到一个数据,索引加1
if(idx==33) // 如果接收到33个数据,包括32位数和以一个同步头
{
idx=0;
ucTim2Flag = 0;
receiveComplete = TRUE;
}
}
else // 下降沿第一次触发
{
idx = 0;
ucTim2Flag = 0;
startflag = TRUE;
}
EXTI_ClearITPendingBit(EXTI_Line7); // 清除中断标志
}5、判断控制码值
由于中断函数中接收并记录下的数据是两个下降沿之间的时间,并不是红外所发送的数据。因此需要根据红外协议,对 32 个时间进行判断,从而获得红外真正发送的数据。
下面这个函数需要在红外完整接收数据后执行,可通过判断接收完成标志位 receiveComplete 来实现。
示例代码如下:
uint8_t Ir_Server()
{
uint8_t i,j,idx=1; //idx 从1 开始表示对同步头的时间不处理
uint8_t temp;
for(i=0; i < 4; i++)
{
for(j=0; j < 8; j++)
{
if(irdata[idx] > =8 && irdata[idx] < 15) //表示 0
{
temp = 0;
}
else if(irdata[idx] > =18 && irdata[idx] < 25) //表示 1
{
temp = 1;
}
remote_code[i] << = 1;
remote_code[i] |= temp;
idx++;
}
}
return remote_code[2]; // 该数组中记录的是控制码,每个按键不一样
//for(idx=0; idx < 4; idx++)
//{
// printf("remote_code[%d] = %#x\n",idx,remote_code[idx]);
//}
}6、主函数
在 main 函数中,对 IO 口和 定时器进行初始化。
主循环中,通过判断接收完成标志位,对接收完成的按键控制码进行打印。
示例代码如下:
void main()
{
...
IR_Pin_init();
Tim2_UPCount_Init(SystemCoreClock/1000000-1,100-1);
while(1)
{
if(repeatEnable)
{
repeatEnable = FALSE;
Ir_Server();
printf("key_code = %#x\n",remote_code[2]);
}
}
}三、演示
如下图为串口打印出接收的红外按键值信息:

说明1:这只是实现红外接收的其中一种方法,网上还有一种比较常见的方法是利用下降沿触发,在中断中进行延迟,判断高电平持续时间以此来判断信号类别。个人感觉这不是一种很好的方法,因为在中断中进行延时会导致主函数得不到及时的处理。
说明2:在调试时,不要在中断处理中加入过多无关语句,例如打印语句,这会导致结果出错。
本文档基于 STM32 F1 系列 MCU,固件库版本 3.5。其他 MCU 及固件库仅需要对库函数略作修改。
作者: cyang
转自: cyang's blog