【资料下载】利用 MPLAB® Harmony v3 在 ATSAM E70/S70/V70/V71器件上实现看门狗定时器(WDT)


本文档介绍了 WDT 的工作原理、模式和时钟源,以及如何使用 MPLAB® Harmony v3 进行配置和生成代码。
本文档介绍了 WDT 的工作原理、模式和时钟源,以及如何使用 MPLAB® Harmony v3 进行配置和生成代码。

CW32系列MCU的GTIM、ATIM的每个定时器都带有至少4路独立的捕获 / 比较通道,输入捕获功能可以测量输入信号的脉冲宽度或者频率。

Cortex-M0+处理器中内置有一个SysTick定时器,通常用于嵌入式操作系统的多任务切换,在不使用操作系统的应用中,亦可作为其它用途,如定时、计时或者为需要周期性执行的任务提供中断源。

定时器单脉冲输出是比较输出应用中的一种模式,所谓的单脉冲就是通过配置定时器使其在一个可控延时后,产生一个脉宽可控的脉冲。

本文主要就定时器溢出中断进行基础讲解和案列解析。

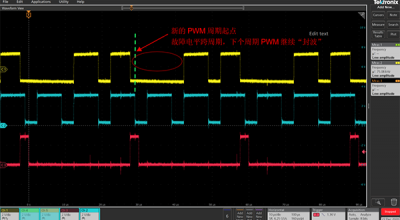
本次测试用的是RA生态工作室提供的R7FA2E1A72DFL demo板,控制定时器输出互补的带死区PWM,并通过中断触发一对IO口的电平切换。

本次测试用的是RA生态工作室提供的R7FA2E1A72DFL demo板,控制定时器输出互补的带死区PWM,并通过中断触发一对IO口的电平切换。
在高精度定时器中,可以使用外部事件来对 PWM 输出进行封锁,并可自动恢复;在高级控制定时器中,可以使用 Break 或是 Clr_input 来对 PWM 输出进行封锁, 然后也可以自动恢复,其中 Break 必须结合 AOE 置位来实现自动恢复。

目前常用的单片机中往往都配备了定时器/计数器。在AT89S52芯片内包含有三个16位的定时器/计数器:T0、T1和T2,其核心是加1计数器。

时钟周期也叫振荡周期或晶振周期,即晶振的单位时间发出的脉冲数,一般有外部的振晶产生......