
MM32L0系列MCU内嵌两个通用比较器 COMP1 和 COMP2,为通用的可编程电压比较器,可独立使用(适用所有终端上的 I/O 口),也可与定时器结合使用, 支持两个独立的比较器。它们可用于多种功能,包括:由模拟信号触发低功耗模式唤醒事件调节模拟信号与 DAC 和定时器输出的 PWM 相结合,组成逐周期的电流控制回路。
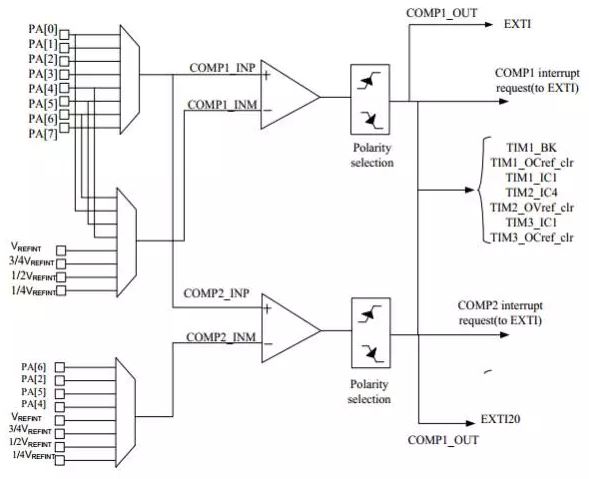
COMPx信号宽度需要测量的输入信号连接到 PA0-PA7。参考信号可通过以下方式供电:
● 内部参考电压(VREFINT、 3/4 VREFINT、 1/2 VREFINT 或 1/4 VREFINT)
● PA4\ PA5\ PA0\ PA7的外部引脚(COMP1),PA4\ PA5\ PA2\ PA7的外部引脚(COMP2)COMPx 输出重映射通过COMP1_CSR[13:10],COMP2_CSR[13:10]比较器 x 输出选择位实现。
在 MM32L0系列MCU中,COMP1 \COMP2 输出可以重映射到内置定时器 TIM1 的 BKIN(刹车输入)和IC4上。重映射 COMP21\COMP2 输出时,可以测量具有特定高/低电平的信号宽度或频率(例如,移位信号)。
定时器输入捕获通道应配置为同时在上升沿和下降沿保存定时计数器值。当输入信号高于参考电压时, COMPx 输出处于高电平,此时会在定时器输入捕获上生成一个上升沿。当输入信号低于参考电压时, COMPx输出处于低电平,此时会生成一个下降沿。两个连续事件之间经过的时间(下降沿到上升沿或者上升沿到下降沿)表示脉冲宽度。因此,只需对计数器值做减法即可测量脉冲宽度。
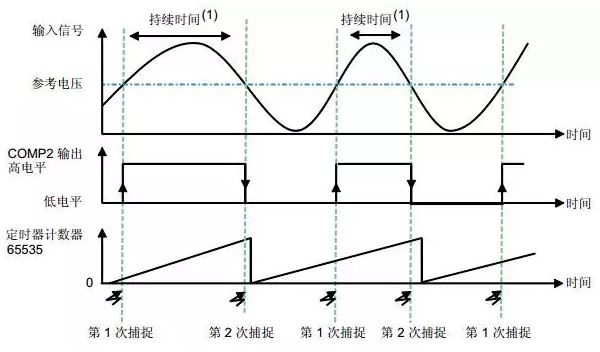
1、将定时器输入捕获通道配置为仅在上升沿或下降沿保存计数器值,即可获得信号频率。
2、参考电压可以使用内部参考电压(0.4v、0.6v、0.9v和1.2v),也可以使用外部 GPIO 接到某一个电压值(0-5v)作为反相输入。
脉冲宽度测量应用:
将 COMPx 输出连接到定时器的输入捕获通道,则可以测量电容值,电容测量过程包括通过电阻对电容进行充电和放电。测量原理基于电阻、电容 (RC) 网络充电时间的测量过程,方法如下:
● 测量充电时间
● 已知充电电阻 (R)
● 可计算未知的电容 (C)
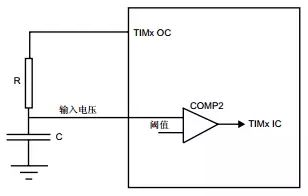
通过 PWM 模式下配置的定时器输出比较通道 (TIMx OC),可确保 RC 网络周期性的充电和放电过程。
输入电压连接到 COMPx 同相输入,而阈值连接到 COMPx 反相输入。当输入电压超过阈值时, COMPx 输出切换为高电平,同时发生保存计数器值的捕获事件。
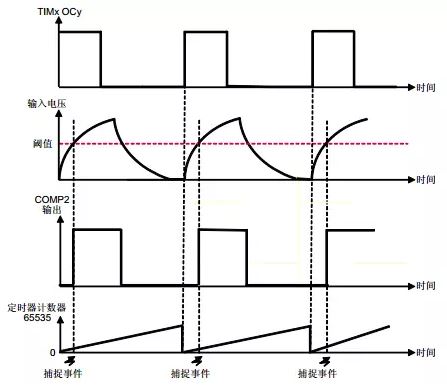
充电函数如下所示:
Input voltage =VDD(1- exp(- t /T))
其中:
● VDD 为正电源电压
● t 为时间
● T 为 RC 常数
根据上述公式可以推算:
C = -t / ( R x In( 1-threshold /(VDD) ))
比较器配置程序:
void Comp_Config(uint32_t COMP_Selection_COMPx)
{
COMP_InitTypeDef COMP_InitStructure;
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_COMP, ENABLE);//开比较器时钟RCC_AHBPeriphClockCmd(RCC_AHBPeriph_GPIOA, ENABLE);//开GPIOA的时钟RCC_APB2PeriphClockCmd(RCC_APB2Periph_SYSCFG, ENABLE);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;//复用推挽输出GPIO_Init(GPIOA, &GPIO_InitStructure);
GPIO_PinAFConfig(GPIOA,GPIO_PinSource0,GPIO_AF_7);// 复用AF7,比较器输出
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AIN;//模拟输入
GPIO_Init(GPIOA, &GPIO_InitStructure);
//内部参考电压1.2v(可以内部基准设置0.4v、0.6v、0.9v和1.2v)
COMP_InitStructure.COMP_InvertingInput = COMP_InvertingInput_VREFINT;
//PA5为正相输入引脚
COMP_InitStructure.COMP_NonInvertingInput = COMP_NonInvertingInput_IO6;
//输出重印射到TIM1的输入捕获通道4
COMP_InitStructure.COMP_Output = COMP_Output_TIM1IC1;
//比较器不上锁
COMP_InitStructure.COMP_BlankingSrce = COMP_BlankingSrce_None;
//比较器输出极性:同相输出
COMP_InitStructure.COMP_OutputPol = COMP_OutputPol_NonInverted;
//比较器迟滞电压:0mV(可设置迟滞电压0-27mV)
COMP_InitStructure.COMP_Hysteresis = COMP_Hysteresis_No;
//比较器模式:中等速率(可设置极低速率、低速率、中等速率、高速率)
COMP_InitStructure.COMP_Mode = COMP_Mode_MediumSpeed; COMP_Init(COMP_Selection_COMPx, &COMP_InitStructure);
//使能比较器
COMP_Cmd(COMP_Selection_COMPx, ENABLE);
}
定时器TIM1配置程序:
void TIM1_PWMINPUT_INIT(u16 arr,u16 psc)
{
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
NVIC_InitTypeDef NVIC_InitStructure;
TIM_ICInitTypeDef TIM1_ICInitStructure;
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_TIM1, ENABLE);//TIM1时钟使能
RCC_AHBPeriphClockCmd(RCC_AHBPeriph_GPIOA, ENABLE);GPIOA时钟使能
TIM_TimeBaseStructure.TIM_Period = arr; //设置重装载值
TIM_TimeBaseStructure.TIM_Prescaler =psc; //设置预分频值
TIM_TimeBaseStructure.TIM_ClockDivision = 0;// TDTS = Tck_tim
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;//向上计数
TIM_TimeBaseInit(TIM1, &TIM_TimeBaseStructure);
NVIC_InitStructure.NVIC_IRQChannel = TIM1_IRQn; //配置中断优先级
NVIC_InitStructure.NVIC_IRQChannelPriority = 1;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
TIM1_ICInitStructure.TIM_Channel = TIM_Channel_1; //选择输入端 IC1映射到TI1 上
TIM1_ICInitStructure.TIM_ICPolarity = TIM_ICPolarity_Rising; // 上升沿捕获
TIM1_ICInitStructure.TIM_ICSelection = TIM_ICSelection_DirectTI; //映射到 TI1 上
TIM1_ICInitStructure.TIM_ICPrescaler = TIM_ICPSC_DIV1; //不分频
TIM1_ICInitStructure.TIM_ICFilter = 0x0; //不滤波
TIM_PWMIConfig(TIM1, &TIM1_ICInitStructure);
TIM_ITConfig(TIM1, TIM_IT_CC1|TIM_IT_Update, ENABLE); //使能捕获和更新中断
TIM_ClearITPendingBit(TIM1, TIM_IT_CC1|TIM_IT_Update); //清中断
TIM_Cmd(TIM1, ENABLE); //定时器使能
}
定时器TIM1中断服务函数:
void TIM1_CC_IRQHandler (void)
{
if (TIM_GetITStatus(TIM1, TIM_IT_CC1) != RESET)
{
period = TIM_GetCapture1(TIM1);
duty = TIM_GetCapture2(TIM1);
CollectFlag = 1;
}
TIM_ClearITPendingBit(TIM1, TIM_IT_CC1|TIM_IT_Update);
}
小结:
1、为保证恶劣环境下比较器设置不能被无效寄存器访问或者程序计数器破坏所改变,比较器控制和状态寄存器可以设为写保护(只读),一旦设置完成, LOCK 位必须设为 1,这导致整个 COMPx_CSR 寄存器变成只读,包括 LOCK 位在内。写保护只能被 MCU 复位所清除。
2、在某些用电池供电的应用中,MCU需要在环境明亮时上电;其它情况下,微控制器必须保持断电状态。对于此类应用,可以使用电阻随光强度变化的光敏电阻 (LDR) 来控制MCU的状态。使用 LDR 传感器时,MCU可根据 LDR 电阻提供的电压切换到低功耗模式或退出低功耗模式。MM32L0系列MCU 的比较器COMP1和COMP2的可在内部将该输出分别连接到 EXTI 线19和20。
转自:灵动微电子

