1 前言
在进行 USB 开发的过程中,有多个客户反馈,USB 传输数据时出现卡顿现象。本文将针对这
一问题进行分析。
2 问题分析
这几个客户问题现象基本差不多,采用 STM32 作为 Device 设备,在与上位机或者 PC 端双向通讯一段时间后,从 Device 端到 Host 端的数据能够正常,而从 Host 端到 Device 端的数据异常,也就是说,STM32 在一段时间后不再能正常接收数据,但是,如果只是单向通信,就一直都是正常的。
这几个客户,有用 STM32F2 的,也有用 STM32F4 的,有用 CDC 类的,也有用作 HID 设备的,但都使用了 Cube 库。
下面就具体问题以其中一个客户使用 STM32F411 的 USB CDC 类的案例来分析问题,现象如
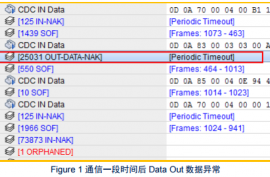
下 USB 通讯数据(CDC 类):
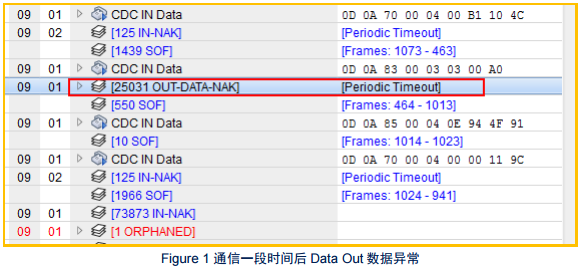
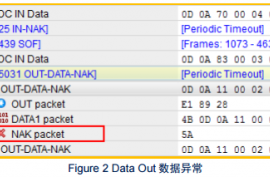
展开 Data Out 数据:
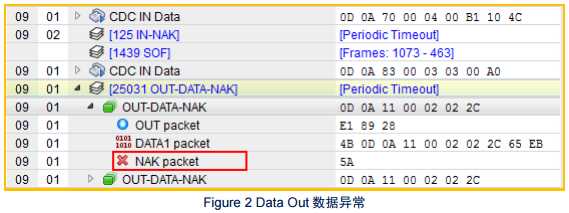
分析上图发现,并不是 Host 端没有向 Device 端发送 Data Out 数据,而是确实发送了,但被 Device
端 NAK 了。那么为什么会被 NAK 呢?
通过在调试下查看寄存器,我们发现当出现问题时,Data OUT 对应的端点 1 是处于关闭状态,那么为
什么端点 1 会关闭?查看 STM32 端的接收代码:
usbd_cdc_if.c:
static int8_t CDC_Receive_FS (uint8_t* Buf, uint32_t *Len)
{
/* USER CODE BEGIN 6 */
//USBTask_ReceiveMsg(Buf, *Len); //UserRxBufferFS
USBD_CDC_SetRxBuffer(&hUsbDeviceFS, &Buf[0]);
USBD_CDC_ReceivePacket(&hUsbDeviceFS);
return (USBD_OK);
/* USER CODE END 6 */
}
如上代码,在 MCU 端接收到赖在 Host 端的数据后不做任何处理就立即接收下一次数据传输,问题是,这里对接收到的数据啥也没有做,居然还会出现 Data Out 端点关闭的问题,那么 OUT 端点到底是怎么关闭的呢?我们接下来看子函数:
CDC_Receive_FS() ->USBD_CDC_ReceivePacket() ->USBD_LL_PrepareReceive() -
>HAL_PCD_EP_Receive() ->USB_EPStartXfer()
最后在 USB_EPStartXfer 函数中有发现再次使能 OUT 端点的代码:
//…
else /* OUT endpoint */
{
/* Program the transfer size and packet count as follows:
* pktcnt = N
* xfersize = N * maxpacket
*/
USBx_OUTEP(ep->num)->DOEPTSIZ &= ~(USB_OTG_DOEPTSIZ_XFRSIZ);
USBx_OUTEP(ep->num)->DOEPTSIZ &= ~(USB_OTG_DOEPTSIZ_PKTCNT);
if (ep->xfer_len == 0U)
{
USBx_OUTEP(ep->num)->DOEPTSIZ |= (USB_OTG_DOEPTSIZ_XFRSIZ & ep->maxpacket);
USBx_OUTEP(ep->num)->DOEPTSIZ |= (USB_OTG_DOEPTSIZ_PKTCNT & (1U << 19U));
}
else
{
pktcnt = (ep->xfer_len + ep->maxpacket -1U)/ ep->maxpacket;
USBx_OUTEP(ep->num)->DOEPTSIZ |= (USB_OTG_DOEPTSIZ_PKTCNT & (pktcnt << 19U));
USBx_OUTEP(ep->num)->DOEPTSIZ |= (USB_OTG_DOEPTSIZ_XFRSIZ & (ep->maxpacket *
pktcnt));
}
if (dma == 1U)
{
USBx_OUTEP(ep->num)->DOEPDMA = (uint32_t)ep->xfer_buff;
}
if (ep->type == EP_TYPE_ISOC)
{
if ((USBx_DEVICE->DSTS & ( 1U << 8U )) == 0U)
{
USBx_OUTEP(ep->num)->DOEPCTL |= USB_OTG_DOEPCTL_SODDFRM;
}
else
{
USBx_OUTEP(ep->num)->DOEPCTL |= USB_OTG_DOEPCTL_SD0PID_SEVNFRM;
}
}
/* EP enable */
USBx_OUTEP(ep->num)->DOEPCTL |= (USB_OTG_DOEPCTL_CNAK | USB_OTG_DOEPCTL_EPENA);
}
也就是说,在调用这个函数之前这个 OUT 端点原本就是关闭的?真的吗?这怎么跟我们理解的不一样?
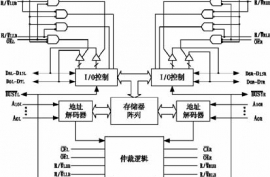
不应该是 OUT 端点一旦打开就一直开着的吗?带着这些疑问,我们查看 STM32F411 的参考手册,终
于在 22.17.6 Operational model 一节中找到这么一幅图(由于 CDC 类数据传输采用的是 BULK 传输):
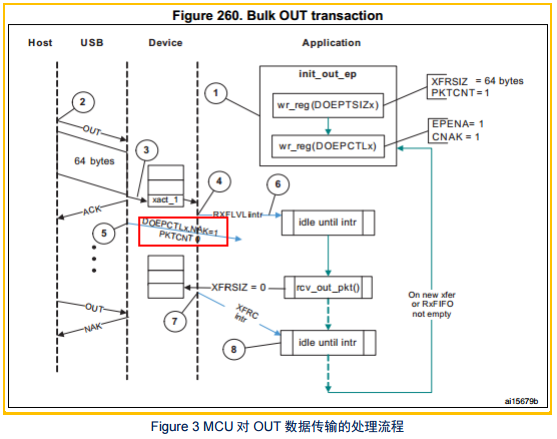
如上图,MCU 对 BULK 类型的 OUT 数据处理例程大体如下:
1> Host 端试图向一个端点发送 OUT token;
2> 当 Device 端的 USB 外设接收到这么一个 OUT token 后,如果 RXFIFO 空间足够,它将数据包存
储到 RXFIFO 中;
3> 在将数据包内容存储到 RXFIFO 后,USB 外设将产生一个 RXFLVL 中断(OTG_FS_GINTSTS);
4> 在接收到 USB 数据包的个数后(PKTCNT),USB 核将内部自动将这个 OUT 端点的 NAK 为置 1,以
阻止接收更多数据包;
5> 应用程序处理 RXFLVL 中断和从 RXFIFO 读取数据;
6> 当应用读取完所有数据(等于 XFRSIZ)后,USB 核将产生一个 XFRC 中断(OTG_FS_DOEPINTx);
7> 应用处理这个 OTG_FS_DOEPINTx 中断并通过 OTG_FS_DOEPINTx 的中断为 XFRC 来判断传输
完成;
从上面步骤中的第 4 步中可以看出,当 USB 核收到来自 Host 端的数据后会自动将 OUT 端点关闭,这
也就是为什么在接收函数中在接收下一次数据时要再次使能这个 OUT 端点的原因。因此我们大体可以
判断出在 OUT 数据传输的过程中,USB 核会禁止端点->打开端点->禁止端点…如此不断循环中;那么
问题到底出现在哪里呢?会不会在 USB 核自动关闭端点后就没有再次成功打开?带着这样的怀疑心态
逐句查看代码,最终在接收函数的子函数中发现这么一段代码:
HAL_StatusTypeDef HAL_PCD_EP_Receive(PCD_HandleTypeDef *hpcd, uint8_t ep_addr, uint8_t*pBuf, uint32_t len)
{
USB_OTG_EPTypeDef *ep;
ep = &hpcd->OUT_ep[ep_addr & 0x7FU];
/*setup and start the Xfer */
ep->xfer_buff = pBuf;
ep->xfer_len = len;
ep->xfer_count = 0U;
ep->is_in = 0U;
ep->num = ep_addr & 0x7FU;
if (hpcd->Init.dma_enable == 1U)
{
ep->dma_addr = (uint32_t)pBuf;
}
__HAL_LOCK(hpcd);
if ((ep_addr & 0x7FU) == 0U)
{
USB_EP0StartXfer(hpcd->Instance , ep, hpcd->Init.dma_enable);
}
else
{
USB_EPStartXfer(hpcd->Instance , ep, hpcd->Init.dma_enable);
}
__HAL_UNLOCK(hpcd);
return HAL_OK;
}
之所以会怀疑这里,这是客户提供了一个信息,单向通信的时候就不会有问题!这是因为在发送数据
时,发送函数的底层函数内也使用到了这个互斥锁:
CDC_Transmit_FS() -> USBD_CDC_TransmitPacket() -> USBD_LL_Transmit() ->
HAL_PCD_EP_Transmit() :
HAL_StatusTypeDef HAL_PCD_EP_Transmit(PCD_HandleTypeDef *hpcd, uint8_t ep_addr, uint8_t*pBuf, uint32_t len)
{
USB_OTG_EPTypeDef *ep;
ep = &hpcd->IN_ep[ep_addr & 0x7FU];
/*setup and start the Xfer */
ep->xfer_buff = pBuf;
ep->xfer_len = len;
ep->xfer_count = 0U;
ep->is_in = 1U;
ep->num = ep_addr & 0x7FU;
if (hpcd->Init.dma_enable == 1U)
{
ep->dma_addr = (uint32_t)pBuf;
}
__HAL_LOCK(hpcd);
if ((ep_addr & 0x7FU) == 0U)
{
USB_EP0StartXfer(hpcd->Instance , ep, hpcd->Init.dma_enable);
}
else
{
USB_EPStartXfer(hpcd->Instance , ep, hpcd->Init.dma_enable);
}
__HAL_UNLOCK(hpcd);
return HAL_OK;
}
接收处理数据时,底层是通过接收中断回调上来的,但发送时,我们往往将发送放到 main 等用户函数
中。这两个是不一样的,一个在中断内,一个在中断外,优先级别是不一样的,优先级不一样就有可
能导致资源冲突;
我们进一步查看__HAL_LOCK()宏定义:
#define __HAL_LOCK(__HANDLE__) \
do{ \
if((__HANDLE__)->Lock == HAL_LOCKED) \
{ \
return HAL_BUSY; \
} \
else \
{ \
(__HANDLE__)->Lock = HAL_LOCKED; \
} \
}while (0U)
若__HAL_LOCK(hpcd);失败则直接返回 return HAL_BUSY 的。为了验证在接收过程中是否
__HAL_LOCK 失败,我们引进全局变量 Lock_Flag,在发送函数中若成功 LOCK 则设置
Lock_Flag=1,UNLOCK 后则复位为 0:
uint8_t Lock_Flag =0;
HAL_StatusTypeDef HAL_PCD_EP_Transmit(PCD_HandleTypeDef *hpcd, uint8_t ep_addr, uint8_t*pBuf, uint32_t len)
{
USB_OTG_EPTypeDef *ep;
ep = &hpcd->IN_ep[ep_addr & 0x7FU];
/*setup and start the Xfer */
ep->xfer_buff = pBuf;
ep->xfer_len = len;
ep->xfer_count = 0U;
ep->is_in = 1U;
ep->num = ep_addr & 0x7FU;
if (hpcd->Init.dma_enable == 1U)
{
ep->dma_addr = (uint32_t)pBuf;
}
__HAL_LOCK(hpcd);
Lock_Flag =1;
if ((ep_addr & 0x7FU) == 0U)
{
USB_EP0StartXfer(hpcd->Instance , ep, hpcd->Init.dma_enable);
}
else
{
USB_EPStartXfer(hpcd->Instance , ep, hpcd->Init.dma_enable);
}
__HAL_UNLOCK(hpcd);
Lock_Flag =0;
return HAL_OK;
}
接下来在接收函数中对全局变量 Lock_Flag 值进行判断,若为 1 则锁死程序,因为在 Lock_Flag=1 时,
则表示发送函数中已经获取了锁没有释放,此时若再去获取则会导致失败从而返回 HAL_BUSY;这里通
过锁死代码以便判断这种情况:
HAL_StatusTypeDef HAL_PCD_EP_Receive(PCD_HandleTypeDef *hpcd, uint8_t ep_addr, uint8_t*pBuf, uint32_t len)
{
USB_OTG_EPTypeDef *ep;
ep = &hpcd->OUT_ep[ep_addr & 0x7FU];
/*setup and start the Xfer */
ep->xfer_buff = pBuf;
ep->xfer_len = len;
ep->xfer_count = 0U;
ep->is_in = 0U;
ep->num = ep_addr & 0x7FU;
if (hpcd->Init.dma_enable == 1U)
{
ep->dma_addr = (uint32_t)pBuf;
}
if(Lock_Flag ==1)
{
while(1);
}
__HAL_LOCK(hpcd);
if ((ep_addr & 0x7FU) == 0U)
{
USB_EP0StartXfer(hpcd->Instance , ep, hpcd->Init.dma_enable);
}
else
{
USB_EPStartXfer(hpcd->Instance , ep, hpcd->Init.dma_enable);
}
__HAL_UNLOCK(hpcd);
return HAL_OK;
}
通过调试,当出现问题时,程序果然被锁死在这个 while(1)了,这也证明了正是这个互斥锁所致。因此,
我们大体可以判断出现问题时流程大致如下:
1> 在 mian 函数中发送数据 CDC_Transmit_FS()
2> USBD_CDC_TransmitPacket()
3> USBD_LL_Transmit()
4> HAL_PCD_EP_Transmit()
5> __HAL_LOCK(hpcd); 此时成功获取互斥锁
6> 恰好此时有一个接收中断,由于 USB 中断具有优先级,跳转到接收中断内执行;同时,USB 核会
自动关闭 OUT 端点;
7> HAL_PCD_DataOutStageCallback()
8> USBD_CDC_DataOut()
9> CDC_Receive_FS()
10> USBD_CDC_ReceivePacket()
11> USBD_LL_PrepareReceive()
12> HAL_PCD_EP_Receive()
13> __HAL_LOCK(hpcd); 此时获取互斥锁失败导致返回,接收函数在 OUT 端点没有再次打开就已经提前结束,导致接收循环无以为继。
3 解决方案
知道了问题原因所在,接下来解决问题就相对来说比较容易的了。由于此问题是发送与接收处于不同优先等级导致资源冲突所致,那么我们可以将发送也放到与 USB 接收中断相同的中断等级中去,例如可以利用 USB 的 EOPF 中断,在开启 EOPF 中断后,在此中断内发送数据,这样发送与接收中断就处于相同等级了,EOPF 每 1ms 触发一次,速度完全可以。当然开启一个相同优先级的定时器来做发送数据也是可以,只不过定时器间隔得控制好。
此外,其实此问题是出现在 Cube 库的低版本中,例如 CubeF4 V1.5.0 和 CubeF2 V1.3.0 中都存在,但是在最新本的 CubeF4 V1.16.0,CubeF2 V1.6.0 版本中此问题得到了解决;此问题虽然后来发现是版本太旧所致,但从多个客户反馈此问题来看,此问题依然不失为一个很好的参考和教训。
来源: 21ic.com