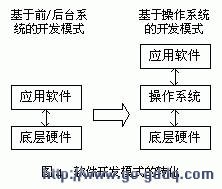
一提到智能家庭,大家可能首先想到的是各种大佬级公司搞的牛逼产品,或者说是创新产品。想想就觉得很复杂,有的用工控机,有的用树莓派,还有的用arduino,不管用什么,都绕不过服务器进行控制,比如yeelink平台,腾讯的智能硬件平台等等。其实,真实实现起来,并没有想想中这么复杂,我们甚至只用一个小的单片机就能实现。
0×01单片机实现web服务器
探讨用单片机来实现web服务器的文章通过baidu也能找到几篇,但比较详实的实现方法并没有找到,这里考虑有两种思路可以完成,一种是有线的lan模块,如w5500,这种模块本身就带有web服务的部分功能,使用起来比较简单,但是只能基于lan进行访问。另一种是通过stm32等单片机,配合网络模块来完成。当前我能想到的最简单的方法就是用stm32+esp8266来实现。
基于第一种方法,我觉得受模块性能影响比较大,受限于模块,没有开发感。于是考虑用第二种方法。这个方法里,有人用arduino来完成,这要基于c进行编程。另外,就是考虑用micropython,这样直接可以用python来实现。这里依然使用tpyboard v202。
0×02模拟实现家庭智能家居控制平台
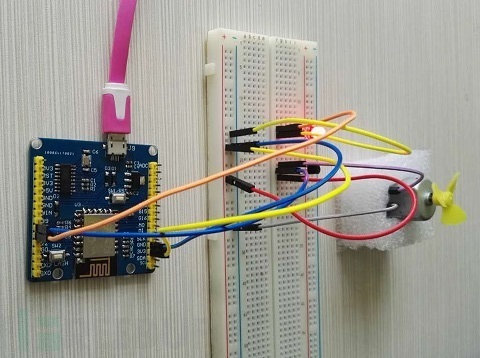
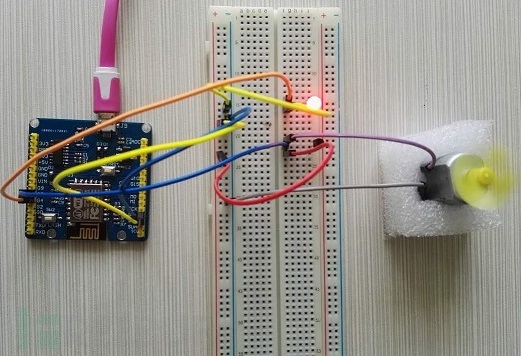
因为没有想好要做一个多么复杂的实验,只是想能模拟一下效果,所有在整个的模块过程中,我选用了tpyboard v202开发板做主控制板,用一个发光二极管来模拟一个台灯(现实中,这里其实可以用一个继电器来控制其它设备的通断电),用一个直流小电机加迷你风扇叶表示模拟电风扇。整个实现还用到了一个三极管(S9014,NPN)来控制直流电机。
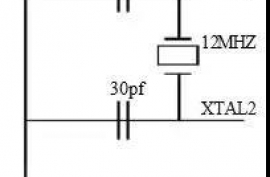
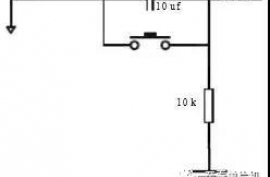
0×03硬件的搭建与连接
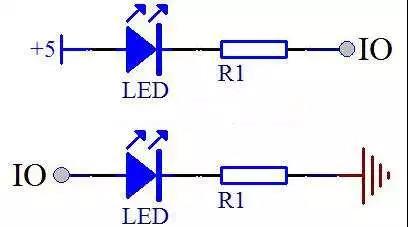
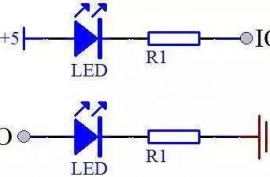
1、发光二极管的使用

发光二极管使用比较简单,直接看它的两条“腿”,长的那个是正极,反之是负极。
2、直流小电机的使用方法

上图直流小电机中,红色框内的两个接线端A和B,无论那个接正极或负极都可以,只不过转动的方向不一样而已。本次我是用B端接入正极,正好是顺时针转动。
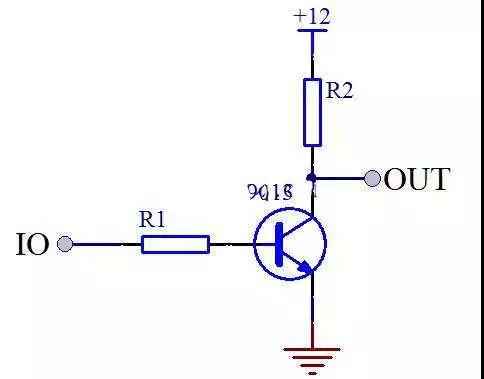
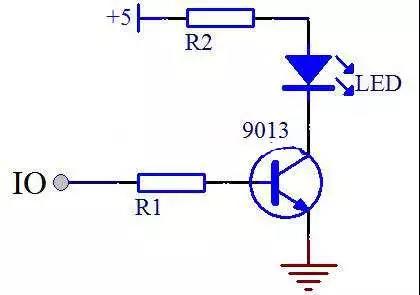
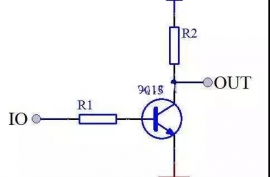
3、三极管S9014(NPN)的使用方法
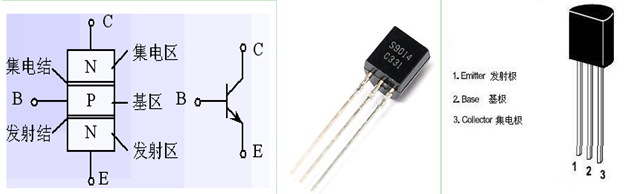
本次我们使用S9014的放大和开关功能,集电极接入v202的3.3V引脚,发射极接入电机某一端,通过给基极高低电平来控制发射极和集电极之间是否导通,从而控制直流电机转动或停止。
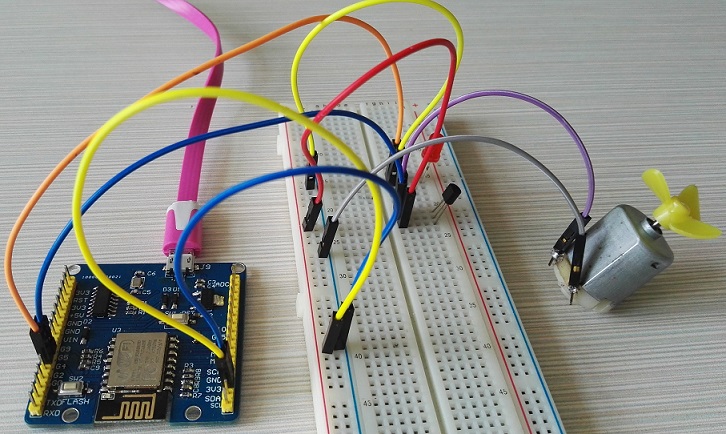
4、接线方法
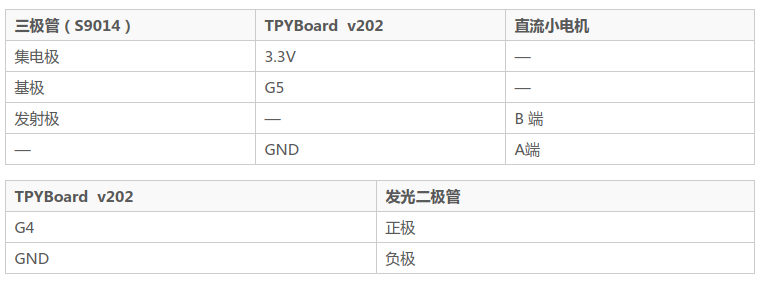
我的实物连接图
0×04利用micropython实现web服务器
首先,编辑一个main.py文件。v202 开机自启动main.py 文件
try:
import usocket as socket
except:
import socket
import network
from machine import UART
from machine import Pin
led_flag=Pin(2, Pin.OUT)#esp8266模块上的小灯 高电平:灭 低电平:亮
led = Pin(4, Pin.OUT)#发光二极管的控制引脚
motor = Pin(5, Pin.OUT)#直流电机的控制引脚
#初始化
led.low()
motor.low()
led_flag.high()
def do_connect(ssid,pwd):
sta_if = network.WLAN(network.STA_IF)#STA 模式
sta_if.active(False)
if not sta_if.isconnected():#判断是否连接
sta_if.active(True)
sta_if.connect(ssid,pwd)#ssid:WIFI名称 pwd:WIFI 密码
while not sta_if.isconnected():
pass
if sta_if.isconnected():
return sta_if.ifconfig()[0]
def main(ip_,dev_data,login_data,name,pwd):
s = socket.socket()
ai = socket.getaddrinfo(ip_, 80)
addr = ai[0][-1]
s.setsockopt(socket.SOL_SOCKET, socket.SO_REUSEADDR, 1)
s.bind(addr)
s.listen(5)
led_flag.low()
#s_data=login_data
while True:
res = s.accept()
client_s = res[0]
client_addr = res[1]
led_flag.high()
req =client_s.readline()
while True:
h = client_s.readline()
if h == b"" or h == b"\r\n":
break
#print(h)
req+=(h.decode('utf-8').lower())
print("Request:")
req=req.decode('utf-8').lower().split('\r\n')
#http header 解析
req_data=req[0].lstrip().rstrip().replace(' ','')
print(req_data)
if req_data.find('favicon.ico')>-1:
client_s.close()
continue
else:
if len(req_data)<=12:
#说明是第一次访问,输入login.html
s_data=login_data
else:
req_data=req_data.replace('get/?','').replace('http/1.1','')
_name=req_data.find('name')
_pwd=req_data.find('pwd')
if _name>-1 and _pwd>-1:
#判断是否是用户登录
if req_data.find(name)>-1 and req_data.find(pwd)>-1:
s_data=dev_data
print('Login Success!')
else:
f=open('fail.html','r')
s_data=f.read()
f.close()
print('Login Fail!')
else:
#判断是否是控制LED
_index=req_data.find('led=')
if _index>-1:
s_data=dev_data
led_val=req_data[_index+4:_index+6].lstrip().rstrip()
print('led:',led_val)
if led_val=='on':
led.value(1)
else:
led.value(0)
#判断是否是控制电机
_index=req_data.find('motor=')
if _index>-1:
s_data=dev_data
motor_val=req_data[_index+6:_index+8].lstrip().rstrip()
print('motor_val:',motor_val)
if motor_val=='on':
motor.value(1)
else:
motor.value(0)
print('-----------')
client_s.send(s_data)
client_s.close()
led_flag.low()
f=open('device.html','r')
dev_html=f.read()
f.close()
f=open('login.html','r')
login_html=f.read()
f.close()
f=open('info.txt','r')
info=f.read()
f.close()
name=info.split(',')[0].lstrip().rstrip()
pwd=info.split(',')[1].lstrip().rstrip()
print('name:',name)
print('pwd:',pwd)
myip_=do_connect('essid','pwd')#家中网络的WIFI名称和密码
print(myip_)
main(myip_,dev_html,login_html,name,pwd)
login.html 登录页面
<html>
<head>
<title>智能家庭网络</title>
<meta name="viewport" content="width=device-width, initial-scale=1" />
<style type="text/css">
h2
{
margin-top:4%;
margin-bottom:40px;
}
</style>
</head>
<body>
<center>
<h2>欢迎登录智能家庭网络平台</h2>
<form action="/" method="get" accept-charset="utf-8">
<p>用户名: <input type="text" name="name" /></p>
<p>密 码: <input type="password" name="pwd" /></p>
<input type="Submit" value="登录" />
</form>
</center>
</body>
</html>
device.html控制页面
<html>
<head>
<title>智能家庭网络平台</title>
<meta name="viewport" content="width=device-width, initial-scale=1" />
<style type="text/css">
h2
{
margin-top:4%;
margin-bottom:40px;
}
</style>
</head>
<body>
<center>
<h2>欢迎使用智能家庭网络-控制平台</h2>
<form action="/" method="get" accept-charset="utf-8">
<p>灯光: <input type="Submit" value="ON" name="led" /> <input type="Submit" value="OFF" name="led" /></p>
<p>风扇: <input type="Submit" value="ON" name="motor" /> <input type="Submit" value="OFF" name="motor" /></p>
</form>
</center>
</body>
</html>
fail.html登录错误页面(就是把login.html 稍做了一下改动)
<html>
<head>
<title>智能家庭网络</title>
<meta name="viewport" content="width=device-width, initial-scale=1" />
<style type="text/css">
h2
{
margin-top:4%;
margin-bottom:40px;
}
</style>
</head>
<body>
<center>
<h2>欢迎登录智能家庭网络平台</h2>
<form action="/" method="get" accept-charset="utf-8">
<p style="color:red">用户名或密码错误!</p>
<p>用户名: <input type="text" name="name" /></p>
<p>密 码: <input type="password" name="pwd" /></p>
<input type="Submit" value="登录" />
</form>
</center>
</body>
</html>
info.txt 这里是用文件存放的用户名和密码(英文逗号分隔),前面是用户名,后面是密码。
这里的用户名和密码是用来登录我们智能家居控制平台的。
admin,123456
0×05程序下载测试
使用MicroPython File Uploader 工具,将源代码下载到v202中。工具下载地址:http://tpyboard.com/download/tool/170.html
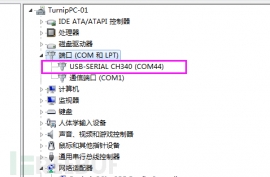
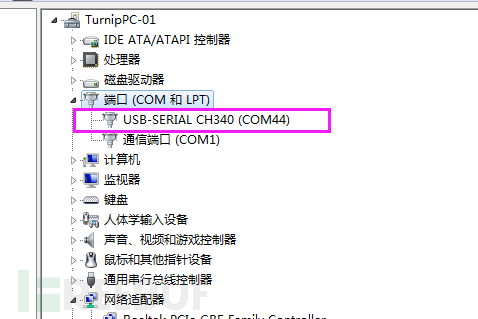
1、 使用usb数据线将v202接入到电脑,打开设备管理器,查看加载的端口。我的是COM44
※如果驱动安装失败,可以下载CH340的驱动,手动安装。CH340驱动下载地址:http://tpyboard.com/download/drive/163.html
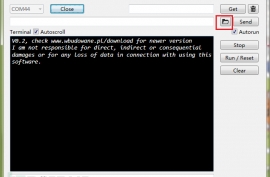
2、 打开MicroPython File Uploader 选择端口,点击[Open]。
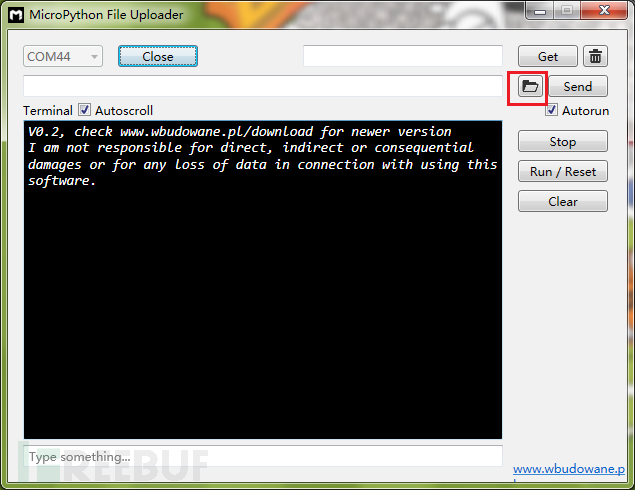
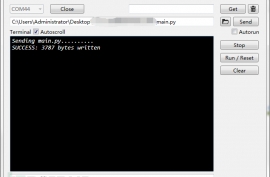
3、 取消[Autorun]的打钩,点击红框的文件夹图标,选择源码,点击[Send]等待发送成功。
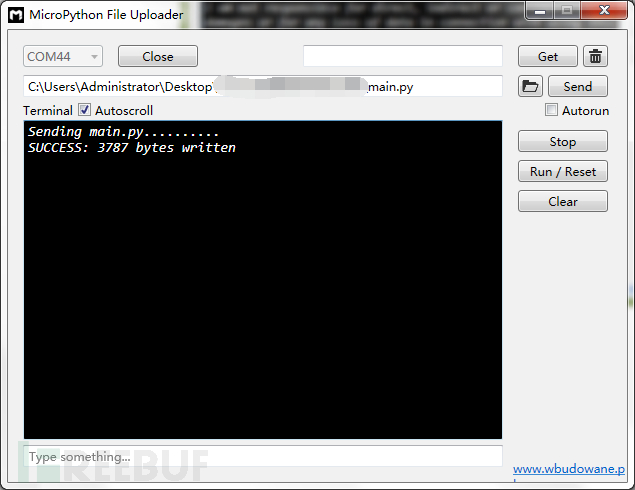
4、将上面的源码文件都下载到v202中,下载完毕后,点击[Run/Reset]就会开始执行代码
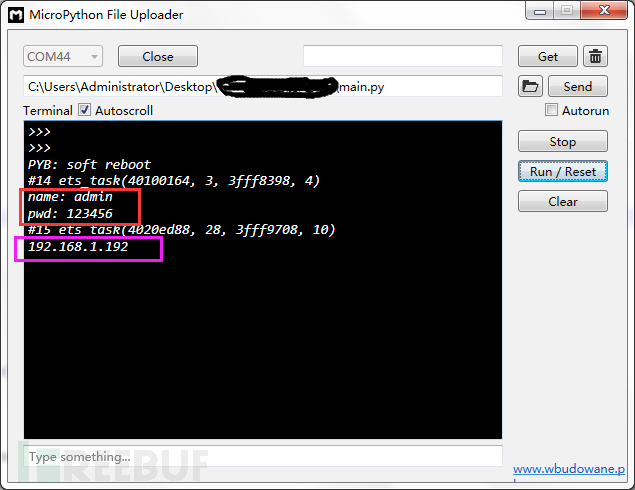
5、开始运行后,红色框内打印的是我们存放在info.txt里的用户名和密码,这个可以自定义。
6、下面桃红色框内打印的是我们v202从路由器那里获取到的IP地址,只要打印了IP地址,说明就成功接入网络了。我的v202获取的IP地址是192.168.1.192。
7、到此,我们的web服务器就搭建完成了。
0×06 智能家庭网络平台的使用
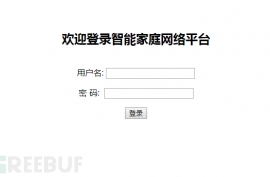
1、在家庭局域网内,我们可以选用pc或者手机,通过浏览器,打开192.168.1.192 就可以看到登录界面。
2、默认用户名 admin 密码123456 ,大家可以通过修改info.txt 文件来进行修改。
(1)输入错误的用户名和密码会进入错误界面
(2) 输入正确的,进入控制平台
3、接下来,我们就可以通过网页开控制灯光和小风扇了,看我的实验效果图。
这里,我只是做了一个实例,受时间限制,没有再做更深入的开发。大家可以自己结合自己的创意再深入去做。如果能够通过路由器给tpyboard v202设一个外网Ip,这样就可以从外网进行访问,从而完成外网对家内设备的控制。
转自: 小五义的博客