
1 引言
当今社会,随着经济的发展,人们生活水平的提高,肥胖的人越来越多,也就导致了越来越多的疾病产生,因此,人们越来越关注健康问题,而锻炼身体是让自己健康的最有效的方法。因此计步器应运而生,就成了时下流行的趋势。步行时,通过伸缩肌肉,血液在流动时的抵抗值下降,血压下降且稳定。经常步行的人很少患高血压或低血压病。坚持步行能减少血管内附着的脂肪性物质,使体重减轻,也逐渐减少心脏的负荷。而基于单片机为核心控制的计步器有着精确,可靠,稳定,方便等优点,已被大多数人所接受。通过计步器人们可以知道自己跑了多少步,实时掌握自己的锻炼情况。
2 总体设计方案
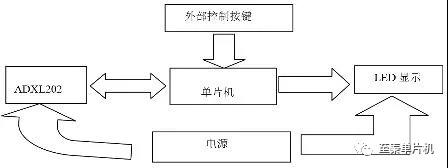
计步器由振荡电路、复位电路、显示电路以及按键电路几个部分组成,由电池进行供电。系统结构图如图1 所示。
3 硬件的设计
3.1 振荡电路
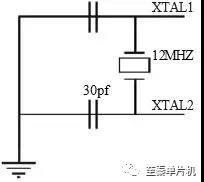
AT89C51 单片机内设有一个由反向放大器所构成的振荡电路,振荡电路是单片机系统正常工作的保证,如果振荡器不起振,系统将会不能工作。假如振荡器运行不规律,系统执行程序的时候就会出现时间上的误差,这在通信中会体现的很明显,电路将无法通信。
它是由一个晶振和两个瓷片电容组成的。时钟电路中的两个电容用作补偿,使得晶振更容易起振,频率更加稳定。如图2 所示。
3.2 复位电路
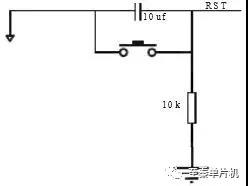
为确保微机系统中电路稳定可靠工作,复位电路是必不可少的一部分,复位电路的第一功能是上电复位。一般微机电路正常工作需要供电电源为5V±5%,即4.75~5.25V。由于微机电路是时序数字电路,它需要稳定的时钟信号,因此在电源上电时,只有当VCC 超过4.75V 低于5.25V 以及晶体振荡器稳定工作时,复位信号才被撤除,微机电路开始正常工作。系统的复位采用了上电复位的形式,上电过程中微控制器复位引脚保证10ms 以上的高电平就能可靠的将微控制器复位。如图3 所示。
3.3 显示电路
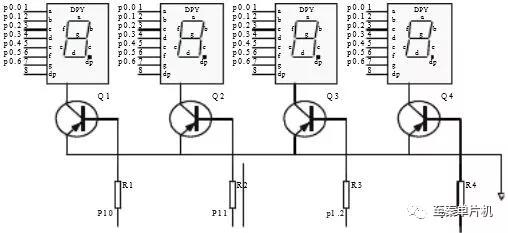
本次设计采用4 位LED 共阴极数码管显示屏做为系统的显示界面,如图4 所示。常用的LED 显示器为8 段或7 段(8 段比7 段多了一个小数点“dp”段)。每一个段对应一个发光二极管。这种显示器由共阳极和共阴极两种。如图4 所示。共阴极LED 显示器的发光二极管的阴极连接在一起,通常次共阴极接地。当某个发光二极管的阳极为高电平时,发光二极管点亮,相应的段被现实。为了使LED显示器显示不同的符号和数字,就要把不同段的发光二极管点亮,这样就要为LED 显示器提供代码,因为这些代码可使LED 相应的段发光,从而显示不同字型,因此该代码称之为段码(或称为字型代码)。7 段发光二极管在加上一个小数点,共计8 段。因此提供给LED 显示器的段码正好是1B。
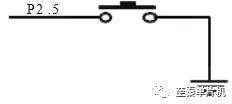
3.4 按键电路
本次设计是以按键的形式来代替人走步所产生的震动,每按键一次即表示人走动一步,其电路如图5 所示。
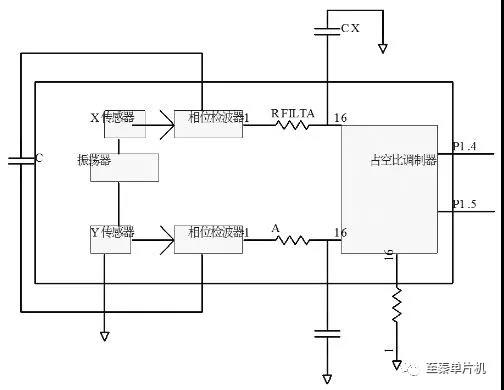
3.5 ADXL202 传感器电路
ADXL022 传感器模块电路如图6 所示。
4 系统软件
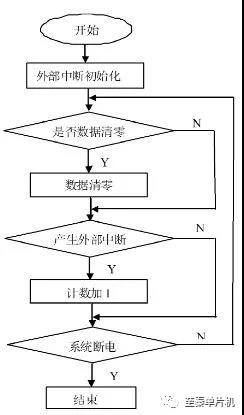
计步开始,内部程序准备就位。人走动一步,传感器检测到峰值,经四种电路,由显示器显示出来,再走一步,由累加器累加1,由此走几步依次加1,由显示器显示。单片机复位系统产生外部中断,显示器置零。系统流程图如图7 所示。
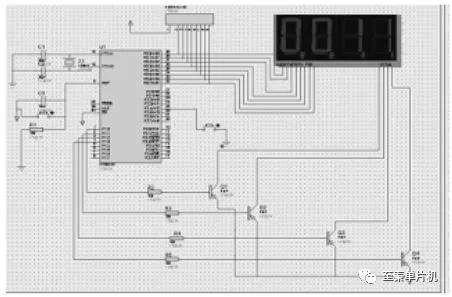
5 软件仿真
系统中将按键电路中按键K1 与单片机的P4.4 进行连接,专用的按键电路产生振荡电路,将电信号通过电路转换给微控制器,微控制器将表征当前步数的数字量按照10 进制等处理后通过直观LED 显示。当按键按下一次的时候,显示器显示1,按几次则显示多少。计步器仿真效果图如图8 所示。
6 结束语
本文主要设计中包含了微控制器、显示部件、输入部件和实时时钟等部分。在整个设计系统中充分掌握各模块电路的工作原理,对硬件电路、软件程序进行设计,最后进行仿真。
转自: 至秦单片机

