基于嵌入式的无人机勘察系统设计


随着遥感、通讯技术的迅速发展,微小无人机的设计逐步被深究。小型无人机由于其高度灵活机动性、信息化强、适应恶劣环境等优势,近几年在军事、高空拍摄、农业等领域有着广泛的应用,通过搭载在机体上的各类传感器单元获取所需的数据信息,如图像的采集,能够对特定特殊环境进行有效的勘察。但目前,无人机的地面控制站主要使用功耗高、体积大的PCI总线采集技术,一定程度限制了无人机的高度灵活性等优点。
为智能硬件开发者、创客提供有关基于英特尔嵌入式处理器的应用技术介绍和合作伙伴方案介绍
随着遥感、通讯技术的迅速发展,微小无人机的设计逐步被深究。小型无人机由于其高度灵活机动性、信息化强、适应恶劣环境等优势,近几年在军事、高空拍摄、农业等领域有着广泛的应用,通过搭载在机体上的各类传感器单元获取所需的数据信息,如图像的采集,能够对特定特殊环境进行有效的勘察。但目前,无人机的地面控制站主要使用功耗高、体积大的PCI总线采集技术,一定程度限制了无人机的高度灵活性等优点。

众所周知,ARM公司在经典处理器ARM11以后的产品改用Cortex命名,并分成A、R和M三类,旨在为各种不同的市场提供服务,正好是ARM公司英文简写的三个字母。Cortex系列属于ARMv7架构,这是到2010年为止ARM公司最新的指令集架构。
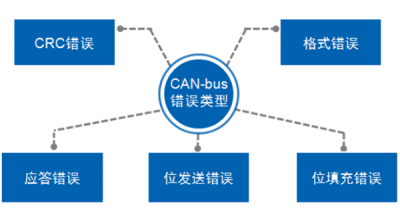
局部错误,全局通知是CAN总线错误类型中较为典型的一种,如何通过错误报文及波形快速定位错误原因呢?本文结合现场实测案例简要分析。
一、CAN总线错误简介
在CAN总线中存在5种错误类型,如图1所示:它们互相并不排斥,下面简单介绍一下它们的区别、产生的原因。

学习内部结构之前,我们先了解下我们现在正在使用的计算机的几大组成部份:
计算机的五个组成部份:
运算器:用于实现算术和逻辑运算。计算机的运算和处理都在这里进行;
控制器:是计算机的控制指挥部件,使计算机各部份能自动协调的工作;
在嵌入式系统中,异步串口(UART)使用非常频繁,可以用于与各种外部系统(帧括PC)之间的通信。在硬件上UART通过在每个字节的传输中插入开始位和停止位,保证接收端可以正确地找到字节的开始和结束,同时也可以通过插入奇偶校验位,让接收端检验收到的字节是否正确。而且,由于有开始位和停止位的存在,使得字节之间可以插入任意的空闲位(与停止位同为高电平),而不影响下一个字节的正常传输。

脉冲宽度调制(PWM),是英文“Pulse Width Modulation”的缩写,简称脉宽调制,是利用微处理器的数字输出来对模拟电路进行控制的一种非常有效的技术。PWM最基本的调节就是频率和占空比,通过调节频率和占空比对外部元件进行控制或者捕捉外部信号源。

现代传动系统要集成控制回路精度、扩展性、网络通信、外设控制、数据和设计安全、功能安全和可靠性等特性,这是十分重要的。此外,电机必须准确并且同步控制,同时不损害性能和确定性,在多轴控制系统中尤其如此。

随着信息技术的发展,信息的载体-芯片的使用也越来越多了,随之而来的芯片安全性的要求也越来越高了,各个芯片厂商对芯片保密性要求越来越高,芯片的加密,保证了芯片中的信息的安全性。经常有客户打电话过来问,这个芯片加密了还能不能用啊。本文通过对芯片的加密的介绍来看看不同的Flash,MCU以及DSP加密的效果。
一、Flash类型芯片的加密

随着超声波技术的不断发展,超声波广泛应用于检测、清洗、焊接、医疗等领域,甚至在纺织、航空领域也能见到它的踪迹。目前,超声的研究和应用可分为功率超声和检测超声两大领域,超声清洗是功率超声最为广泛的应用之一。它通过换能器,将功率超声的声能转换成机械振动,同时强超声波在液体传播时会产生“空化效应”。

摘 要:采用气体传感器阵列采集气体信息,通过以AT89C51 和ADC0809 组成的核心单元进行数据采集和数据处理,以LED 显示器显示结果,实现了对多种气体的识别和检测。