
随着遥感、通讯技术的迅速发展,微小无人机的设计逐步被深究。小型无人机由于其高度灵活机动性、信息化强、适应恶劣环境等优势,近几年在军事、高空拍摄、农业等领域有着广泛的应用,通过搭载在机体上的各类传感器单元获取所需的数据信息,如图像的采集,能够对特定特殊环境进行有效的勘察。但目前,无人机的地面控制站主要使用功耗高、体积大的PCI总线采集技术,一定程度限制了无人机的高度灵活性等优点。因此,以32位ARM微处理器为核心、DM368作为协处理器,设计出一种基于嵌入式的实时性强、数据传输和处理速度快的无人机勘察系统。
1 系统功能架构
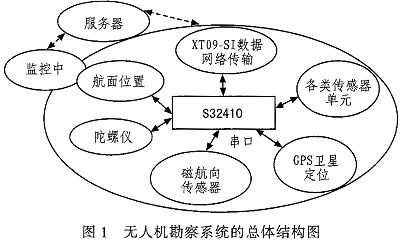
无人机系统的设计由飞行控制系统、无线通信系统、地面控制站三大遥感技术组成,飞行过程包括飞行器的起飞、飞行轨迹、任务处理和回收等过程,其中飞行控制系统是本系统设计的核心。图1为无人机勘察系统的总体结构图。图中传感器单元由陀螺仪、GPS等组成,采用无线射频模块XT09-SI负责将采集到的信息传输到地面控制站并传达地面控制站的控制指令,形成飞行控制-飞行管理-飞行任务实施,完成无人机的信息接收、信息处理、信息输出的功能,实现智能化、网络化。
2 系统硬件设计
本系统围绕着以以ARM为内核的S3C2410搭建起主控制处理模块,采用小型的CCD摄像机和DM368视频协处理组成对音频和视频的采集,无线射频模块XT09-SI作为数据的传输和接收通道的媒介,在无人机飞行器上搭载GPS、陀螺仪、磁航向等多种传感器单元,实现对不同数据的精确采集和改变飞行轨迹等功能。
2.1 数据传输模块
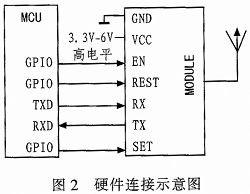
数据的采集和传输及接收是无人机系统设计的复杂部分,为了有利于系统后期的功能拓展和硬件维护,采用模块化的设计。采用XT09-SI无线射频模块作为该电路的数据传输模块。该无线传输模块与微控制器的电路接口采用串行通信原理,硬件连接示意图如图2所示。数据间通信使用标准的RS-232接口,并设计高速光耦隔离6N137模块对电路提高抗干扰能力,通过接收地面控制站的指令,完成无人机的飞控的控制、数据采集和发送等功能。
2.2 图像视频传输模块
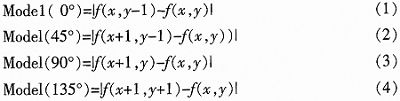
DM368模块是基于ARM 926EJ处理器的低功耗数字多媒体处理芯片,DM368模块采用的是完成符合PAL制式视频标准,可接Flash Memory或者FPGA等设备,支持H.264、MPPEG4等图像编码技术,芯片内部集成32 k RAM、16 kROM、丰富的外部接口等资源,集图像和音频采集于一体,可以稳定高效的管理数据通信、视频压缩编码等任务。由于视频数据在发射端和接收端会存在偏差,为了减少误差,需对H.264帧图像压缩编码算法进行优化。常用的H.264处理方法有对编码纹理负责区域的4×4像素和区域平坦的16x16像素两种算法,帧的预测可以看成是由简单的加法和移位运算来减少预测模式从而提高编码的效应。16x16像素预测模式由垂直预测、水平预测、DC预测以及平面预测4种模式,4种模式的函数为:
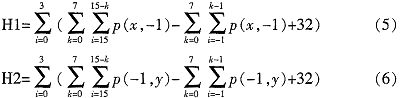
本系统对图像的帧算法通过对16x16像素预测编码采用加法器和移位器运算,对计算方程进行优,减少数据占用空间,使视频传输效率提高。采用的算法如下:
2.3 主控制器模块
无人机勘察系统的主控制器选用具有高性能、低功耗32位内核S3C2410,工作频率最高可达到266 MHz,拥有高效的信号处理能力,片上集成丰富的资源,高达24个外部中断源,能够满足多路中断处理,提高处理器的资源利用率,3路URAT,I2C、PWM、SPI等多路通信接口,片外存储器的接口拓展有Nor Flash、SDRAM,通过总线方式与微处理器相连,拓展储存数据空间,并且具有高数据传输的DAM通道。S3C2410芯片通过SPI接口和RS-232接口与XT09-SI无线模块以及其他传感器单元模块进行数据的交换。
3 软件设计
无人机勘察工程中,地面控制站对无人机的控制方式有手动航模操作、遥控指令控制、程序预定控制等操作,操作系统要求满足能够管理多任务和判断优先级。在目前的嵌入式操作系统中有Linux、UC/OS、UC/GUI等多种,都具备各自的优势。无人机勘察系统要求软件的编写可靠、简单易操作,因此,本系统的软件设计采用可管理64个实时多任务内核的UCOSII。要实现对无人机的飞行控制,软件编程的重点在于对UC/OS操作系统的体系结构拓展,建立起RTOS实时操作系统。以下是操作系统的部分示意代码。
4 系统测试
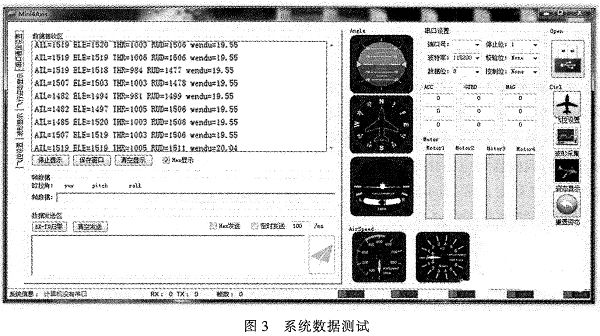
地面监控平台是这个系统设计的重要部分,监控中心上位机采用Qt开发,通过Socket编程,实现上位机和无人机控制程序之间能够双向通信,实时接收无人机采集到的信息和发送控制指令,完成所需的飞行任务。地面监控平台能过得到无人机采集到各类传感器单元的数据,并实时在窗口显示出来。本次实验让无人机进行简单的飞行测试,系统能够及时响应。图3是监控系统接收到的部分信息。
5 结束语
文中设计了基于嵌入式的无人机勘察系统,通过引入UC/OS实时内核,能够完成数据的采集、传输和处理,运用DM368视频协处理对高压缩率的H.264标准的图像进行压缩编码,可采集并传输稳定、高速实时勘察到的图像和音频。整体绕着ARM构成的微控制器运转、具有低功耗、数据处理速度高效等特点,随着嵌入式和传感器的不断发展,无人机勘察将在军事、高空拍摄、农业等领域得到更好的发展与应用。
来源:电子设计工程