【下载】PIC32 系列参考手册——捕捉 / 比较 /PWM/ 定时器 (MCCP 和 SCCP)


部分 PIC32 系列器件包含了一个或多个捕捉 / 比较 /PWM/ 定时器(CCP)模块。这些模块类似于
许多其他 16 位单片机上的多功能定时器模块。此外,它们还提供与先前所有 PIC32 器件上的输入
捕捉、输出比较和通用定时器外设相当的功能。
部分 PIC32 系列器件包含了一个或多个捕捉 / 比较 /PWM/ 定时器(CCP)模块。这些模块类似于
许多其他 16 位单片机上的多功能定时器模块。此外,它们还提供与先前所有 PIC32 器件上的输入
捕捉、输出比较和通用定时器外设相当的功能。

定时/计数器结构(T0和T1)
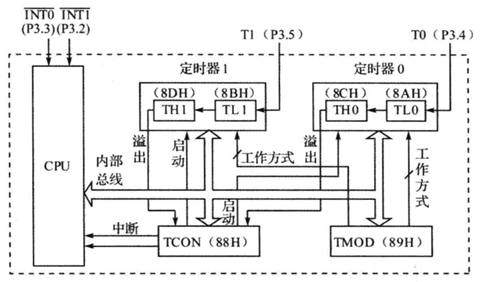
16位寄存器T0、T1分别由TH0、TL0和TH1、TL1四个8位计数器组成

方式1
当TMOD中的M0=0,M1=0时,为13位计数或定时方式,其中TLi使用低5位,其结构如图4.2所示。

STM32F4系列定时器输出PWM频率计算
第一步,了解定时器的时钟多少:

在MCU中(M16),定时器是独立的一个模块,M16有三个独立的定时器模块,即T/C0、T/C1和T/C2;其中T/C0和T/C2都是8位的定时器,而T/C1是一个16位的定时器。定时器的工作是独立于CPU之外自行运行的硬件模块。
1、定时器何时开始工作(或说计数)的?

在51单片机的学习过程中,我们经常会发现中断、计数器/定时器、串口是学习单片机的难点,对于初学者来说,这几部分的内容很难理解。

1、定时器同步
在MM32L073一个定时器有4 通道 PWM 输出,有客户在应用中需要使用两个定时器控制6路PWM输出,为了使两个定时器的PWM输出相同的波形,所以需要两个定时器实现同步功能。

本文提到的有以下内容:
• 时钟系统与总线矩阵
• SysTick系统定时器
• RTC实时时钟
• 看门狗定时器
• 通用定时器
一、时钟系统与总线矩阵
stm32F4的时钟树如下图所示:
在MCU中(M16),定时器是独立的一个模块,M16有三个独立的定时器模块,即T/C0、T/C1和T/C2;其中T/C0和T/C2都是8位的定时器,而T/C1是一个16位的定时器。定时器的工作是独立于CPU之外自行运行的硬件模块。
1、定时器何时开始工作(或说计数)的?

先说说什么是时钟周期?什么是机器周期?什么是指令周期?
时钟周期