一文讲解单片机、ARM、MCU、DSP、FPGA、嵌入式错综复杂的关系!

首先,“嵌入式”这是个概念,准确的定义没有,各个书上都有各自的定义。但是主要思想是一样的,就是相比较PC机这种通用系统来说,嵌入式系统是个专用系统,结构精简,在硬件和软件上都只保留需要的部分,而将不需要的部分裁去。
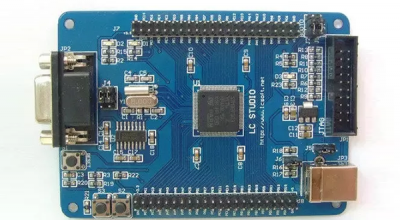
单片机(Microcontroller, MCU)是一种集成了计算机功能的微型计算机,通常由一个微处理器(CPU)、存储器(ROM、RAM)、输入/输出接口、定时器/计数器等功能模块集成在同一芯片上。单片机是一种常用于嵌入式系统中的控制器,它被广泛应用于家电、汽车、工业自动化、医疗设备、消费电子、物联网(IoT)设备等多个领域。
首先,“嵌入式”这是个概念,准确的定义没有,各个书上都有各自的定义。但是主要思想是一样的,就是相比较PC机这种通用系统来说,嵌入式系统是个专用系统,结构精简,在硬件和软件上都只保留需要的部分,而将不需要的部分裁去。
单片机是可编程器件,开发者把程序写好、编译完之后,需要烧录到单片机中,单片机才能按照开发者的逻辑去执行。在这个烧录的过程中需要用到专用的烧录工具。
在你学习单片机之前,觉得模拟电路和数字电路基础不好的话,不要急着学习单片机,应该先回顾所学过的模拟电路和数字电路知识,为学习单片机加强基础。

单片机主要作用是控制外围的器件,并实现一定的通信和数据处理。但在某些特定场合,不可避免地要用到数学运算,尽管单片机并不擅长实现算法和进行复杂的运算。

正确估计单片机的能力,知道单片机能做什么,最大程度的挖掘单片机的潜力对一个单片机系统设计者来说是至关重要的。

电源电压不稳或强干扰引起PC跑飞,如果看门狗不好,也会引起死机。

我们知道常规的断点调试是在想观察哪里的问题时就在对应的代码地址设置断点,并且一旦运行到断点位置会让程序自动暂停运行......

电源技术的发展方向之一是并联运行分布电源系统,以便通过N+1 冗余获得故障容错及冗余功率,并且建立模块式分布电源系统,以增大总负载电流。
本文将为您详细讲解单片机11种常见的电路设计模块。

本文档介绍如何使用 MHC 通过 MPLAB Harmony v3 模块在 32 位 PIC32 单片机(MCU)上创建应用程序。