
有客户需要用到高精度的DAC模块,MM32L0系列产品内部没有集成DAC模块,考虑到外接DAC芯片会增加成本,所以在本实验中将为大家介绍使用PWM输出,经过简单的变换电路即可实现DAC,这将大量降低电子设备的成本、减少体积,并提高精度。本实验在PWM到DAC转换关系的理论分析基础上,设计出输出为0~5V电压的DAC。
MM32L0系列产品包含1个高级控制定时器、5个通用定时器(1个32 位定时器和5个16 位定时器),以及 2个看门狗定时器和1个系统嘀嗒定时器。
每个定时器都有 PWM 输出或单脉冲模式输出,所以MM32L0系列产品任意一款型号都可以用PWM做DAC输出功能。
PWM波形的分段函数:

其中:k为谐波次数,N是PWM波一个周期的计数脉冲个数,T是单片机中计数脉冲的基本周期,即MCU每隔T时间记一次数(计数器的值增加或者减少1),t为时间, n是PWM波一个周期中高电平的计数脉冲个数,VH和VL分别是PWM波中高低电平的电压值。
PWM的高低电平分别为VH和VL,理想的情况VL等于0,但是实际中一般不等于0,所以用户在处理PWM的VL时需注意,出现较大误差一般都是因为这个地方。
将上述函数展开成傅里叶级数得到:
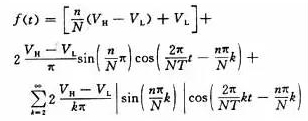
从上式可以看出,上式中第1个方括弧为直流分量,第2项为1次谐波分量,第3项为大于1次的高次谐波分量。上式中的直流分量与n成线性关系,并随着n从0到N,直流分量从VL到VL+VH之间变化,这正是电压输出的DAC所需要的。因此,如果能把式中除直流分量的谐波过滤掉,则可以得到从PWM波到电压输出DAC的转换,即:PWM波可以通过一个低通滤波器进行解调。式中的第2项的幅度和相角与n有关,频率为1/(NT),该频率是设计低通滤波器的依据。如果能把1次谐波很好过滤掉,则高次谐波就应该基本不存在了。
在DAC的应用中,分辨率是一个很重要的参数,傅里叶级数公式中的分辨率计算直接与N和n的可能变化有关:

从上式中可看出:
N越大DAC的分辨率越高,但是NT也越大,即 PWM的周期或者傅里叶级数公式中的1次谐波周期也越大,相当于1次谐波的频率也越低,需要截止频率很低的低通滤波器,DAC输出的滞后也将增加。为了使T减少,即减少单片机的计数脉冲宽度(这往往需要提高单片机的工作频率),达到不降低1次谐波频率的前提下提高精度。
MM32L0系列产品最高工作频率可达 48MHz,TIM2是32位的定时器,PWM频率计算公式:
Fpwm = 48M / ((arr+1)*(psc+1))(单位:Hz)
公式中psc就是分频系数,arr就是计数值。预分频器可以将计数器的时钟频率按 1 到 65536 之间的任意值分频。计数值可以从1-4294967295(2的32次方减1)中任意选取。
本次实验采用两阶RC滤波,使用两个电阻和两个电容组成一个具有DAC功能的引脚,PB10是32位的定时器TIM2_CH3通道,PA3和PA4两个通道分别去采集1阶RC滤波和2阶RC滤波后的电压值。
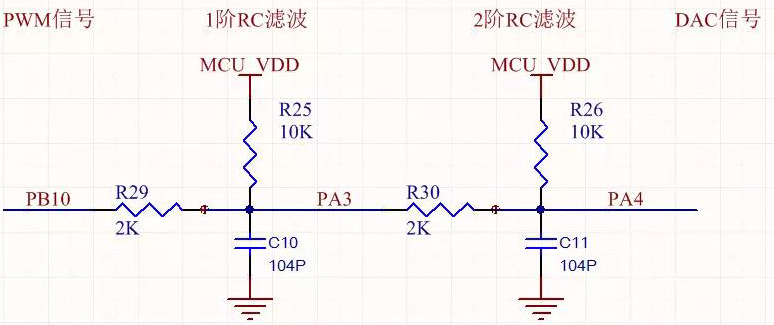
R29和C10的具体参数可根据傅里叶级数公式的第2部分的一次谐波频率来选择,实际应用中一般选择阻容滤波器的截止频率为傅里叶级数公式的基波频率的1/4左右。
RC滤波器的截止频率计算公式:
滤波器是频率选择电路,只允许输入信号中的某些频率成分通过,而阻止其他频率成分到达输出端。在电路中需要考虑到芯片引脚输出端到RC滤波电路之间的存在阻值等问题,上图中的电阻和电容值需要根据实际情况计算调整。
PB10引脚能将不同占空比的PWM信号转换为不同电压值的模拟信号。为了能更准确的获取DAC转换值,电路中还使用了2个ADC通道用来检测DAC转换值。在转换过程中PWM信号频率越快DAC输出的电压值越稳定,PWM位数越高DAC输出的电压值精度越高,32位PWM比16位PWM精度高。
实验程序:
TIM2定时器配置:
u32 OutCnt;
void InitTIM2_PWM(u16 t1, u16 t2, u16 psc)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_AHBPeriphClockCmd(RCC_AHBPeriph_GPIOB, ENABLE);
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10; //TIM2_CH3
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_11; //TIM2_CH4
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);
GPIO_PinAFConfig(GPIOB, GPIO_PinSource10,GPIO_AF_2);
GPIO_PinAFConfig(GPIOB, GPIO_PinSource11,GPIO_AF_2);
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_TimeBaseStructure.TIM_Prescaler =psc;
TIM_TimeBaseStructure.TIM_Period = t1;
TIM_TimeBaseStructure.TIM_ClockDivision = 0;
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInit(TIM2, &TIM_TimeBaseStructure);
TIM_OCInitTypeDef TIM_OCInitStructure;
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1;
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;
TIM_OCInitStructure.TIM_Pulse = 0;
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;
TIM_OC3Init(TIM2, &TIM_OCInitStructure);
TIM_OC4Init(TIM2, &TIM_OCInitStructure);
TIM_OCInitStructure.TIM_Pulse = t2;
TIM_OC3Init(TIM2, &TIM_OCInitStructure);
TIM_OC3PreloadConfig(TIM2, TIM_OCPreload_Enable);
TIM_OCInitStructure.TIM_Pulse = t2;
TIM_OC4Init(TIM2, &TIM_OCInitStructure);
TIM_OC4PreloadConfig(TIM2, TIM_OCPreload_Enable);
TIM_ARRPreloadConfig(TIM2, ENABLE);
TIM_Cmd(TIM2, ENABLE);
}
获取 SysTick 计数器的值:
u32 GetSysTickCount(void)
{
return SysTick_Count;
}
设置 SysTick 重装载值:
void SysTick_Configuration(void)
{
SysTick_Config(48000);
}
SysTick中断配置:
u32 pwm = 150;
void SysTick_Handler(void)
{
if (SysTick_Count ++ > 500)
{
SysTick_Count = 0;
InitTIM2_PWM(1024, pwm, 1);
}
}
主函数:
int main(void)
{
SystemInit();
SysTick_Count = 0;
SysTick_Configuration();
while(1)
{
}
}
操作方法:按照上述硬件搭建实验环境后,上电接上调试器,进入Debug状态,在IAR的Live watch窗口修改pwm值可以实现占空比可调。
实验结果:
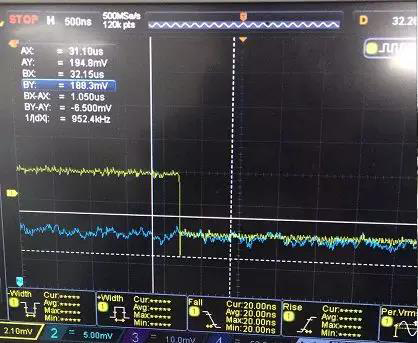

根据实验现象:
从PWM到DAC输出的信号处理有许多电路实现方法,上述电路实现方法DAC输出的负载能力比较差,适合具有高输入阻抗的后续电路连接,对精度和负载能力要求较高的场合,建议增加基准电压、负载驱动等电路。在MCU的应用中还可以通过软件的方法进行精度调整和误差的进一步校正。
PWM 外设结合本电路所实现DAC 有非常好的差分非线性(DNL)、线性度(INL),8位分辨率的情况下,PWM 频率为50KHz,实测精度在 0.5LSB 以内,适合于输出低频、高精度的模拟信号。
转自: 灵动微电子