目前,全球的MCU呈百花齐放趋势,欧、美、日、台均表现出众。中国作为全球最大的芯片销售国,每年消耗掉的MCU数量占据全球市场总量的70%左右,然而由中国芯片厂家直接生产的MCU芯片却凤毛麟角,并且绝大部分仍处于低端的4/8位MCU芯片阶段。不过,国内还有宏晶、兆易创新等企业在MCU高端领域发力,未来还是值得期许的!
什么是MCU?
MCU(Micro Controller Unit),又称单片微型计算机(SingleChip Micro computer)不过,MCU可不是一台机器,而是一块集成电路芯片。
单片机是采用超大规模集成电路把中央处理器CPU、随机存储器RAM、只读存储器ROM、冲断系统、定时器/计数器、AD转换器、通信接口和普通I/O口等集成到一块硅片上,构成的一个微型的、完整的计算机系统。
单片机的CPU相当于PC机的CPU,单片机的数据存储器RAM相当于PC机的内存,单片机的程序存储器ROM相当于PC机的硬盘,单片机的I/O口相当于PC机的显卡、网卡、扩展卡等的插槽。
MCU发展简史
☞1975年,美国德州仪器公司(TI)首次推出4位单片机——TMS-1000,标志着单片机正式诞生。
☞ 1976年,Intel公司研制出了MCS-48系列8位单片机,使单片机的发展进入了一个新阶段。MCS-48系列单片机内部集成了8位CPU、多个并行I/O口、8位定时器/计数器、小容量的RAM和ROM。当时还没有串行通信接口,操作相对简单。
☞1980年,Intel公司在MCS-48系列单片机的基础上,推出了MCS-51系列8位高档单片机,这就是当前大名鼎鼎的“51单片机”的祖先。MCS-51系列单片机比MCS-48系列单片机有明显提高,内部增加了串行通信接口。MCS-51系列单片机因其性能可靠、简单实用、性价比高深受欢迎,被誉为“最经典的单片机”。据悉,全球各大高校的单片机教材均使用了MCS-51系列8位单片机为教程内容。
☞1983年,16位单片机正式问世,不过由于性价比并不理想,遂未得到普及。16位单片机主要被应用于复杂的控制系统以及早期的嵌入系统。
☞90年代之后,集成电路技术高速发展,32位单片机应运而生,嵌入式系统因此得到大力推广。就在32位单片机大举入侵市场之时,8位单片机将被32位单片机取代的声音一时甚嚣尘上。不过,也有业内人士表示,未来8位和32位将以互补性的组合占据MCU领域,而16位产品面对8位和32位MCU的“双向夹击”,或将逐步走向消亡。
MCU主要分类
☞MCU按其存储器类型可分为无片内ROM型和带片内ROM型两种。对于无片内ROM型的芯片,必须外接EPROM才能应用(典型芯片为8031)。带片内ROM型的芯片又分为片内EPROM型(典型芯片为87C51)、MASK片内掩模ROM型(典型芯片为8051)、片内FLASH型(典型芯片为89C51)等类型;
☞按用途分为通用型和专用型;
☞根据数据总线的宽度和一次可处理的数据字节长度可分为8、16、32位MCU。
MCU主要应用领域
目前,国内MCU应用市场最为广泛的是消费电子领域,其次是计算机与外设和汽车电子市场。
☞消费电子,包括家用电器、电视、游戏机及音视频系统等;
☞工业领域,包括智能家居、自动化、医疗应用及能源生成与分配;
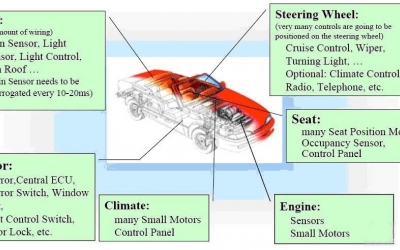
☞汽车领域,包括汽车动力总成和安全控制系统。
MCU未来市场趋势
1、后来居上,32位MCU将成主流。
据ICInsights市场研究报告显示,2015年全球MCU市场规模达到168亿美元,出货量255亿颗。对于32位MCU市场而言,2015年是具有重大标志性意义的一年,全球32位MCU出货量超过4/8位MCU与16位MCU出货量的总和,而且未来几年应该会保持30%左右的高速增长。
在物联网应用中,很多场合不仅需要实现机械化向电磁化、智能化的转变,而且还要考虑可靠的连接性、安全性和保护性,所有这些功能的实现都需要MCU的参与,因此32位MCU会是物联网应用的主流。
2、MCU大整合将成未来发展新趋势。
随着智能设备、物联网等产业的快速发展,无线RF、传感器、电源管理等搭配MCU成为一种新趋势。高度整合的MCU不仅可以方便客户开发产品,并且可减少印刷电路板的占用空间,从而能够降低一部分成本,将来非常具有市场潜力。
3、ARM核心与专用核心MCU,短期内难分伯仲。
从MCU整体发展看,专有核心MCU仍保持着强大竞争优势,两大国际厂商瑞萨和Microchip还在坚守自己的核心,并未转向开发ARM核心MCU,这是因为专有核心MCU在相关应用领域有长期积累,在软硬件开发和支持都很成熟。从短期来看,专有核心MCU仍会保持增长。但专有核MCU也存在瓶颈,比如很难实现跨领域推广,开发工具成本要比ARM核高,而且支持力度要比ARM核小,二者未来长期发展状况将如何呈现,将有待观察。
MCU全球超级明星榜
1、STM32系列
由意法半导体推出的STM32系列单片机,在业内赫赫有名。这是一款性价比超高,功能超强的单片机。2016年初,STM32全球出货已破16亿颗大关,相当于每秒就有20颗被出售,产值超过了STM8。意法半导体方面表示,2019财年意法半导体MCU在中国市场的市占率要达到20%,STM32则是其首要武器。
STM32系列家族主要有:STM32 F0、STM32 F1、STM32 F2、STM32 F3、STM32 F4、STM32 L0、STM32 L1、STM32T、STM32W等。其划分标准:从内核上分,可分为:Cortex-M0/-M0+、Cortex-M3、Cortex-M4,以及Cortex-M7。从应用上分,大体分为:超低功耗型、主流型、高性能型。
2、PIC系列
PIC系列单片机是美国微芯公司(Microship)推出的产品,该系列单片机不是单纯的功能堆积,而是以多型号来满足不同层次的需要,并可提供低价的OTP芯片。另外,该系列单片机还具有低功耗睡眠功能、掉电复位锁定、上电复位电路、看门狗电路等功能,而且外围器件少、占用空间小;成本低,保密技术也十分可靠,可最大限度地保护开发者的利益。因此,在工业控制、仪器仪表、计算机、家电等诸多领域具有极其广阔的发展前景。
3、51系列
作为入门级别的51单片机,最早由Intel推出,主要有8031、8051系列。由于其典型的结构和完善的总线专用寄存器的集中管理,众多的逻辑位操作功能及面向控制的丰富的指令系统,堪称为一代“经典”,为以后的其它单片机的发展奠定了基础。后来Atmel以8051内核为基础推出了AT89系列单片机。
4、TMS系列
TMS系列单片机,是由德州仪器推出的8位CMOS单片机。具有多种存储模式、多种外围接口模式,适用于复杂的实时控制场合。其低工作功耗CMOS技术,宽工作温度范围,噪声抑制,再加上高性能和丰富的片上外设功能,使TMS370C系列单片机被广泛应用于汽车电子,工业电机控制,电脑,通信和消费类电子等领域。
5、MSP430系列
MSP430系列单片机是德州仪器1996年开始推向市场的一种16位超低功耗的混合信号处理器。主要是由于其针对实际应用需求,把许多模拟电路、数字电路和微处理器集成在一个芯片上,以提供“单片”解决方案。因其低功耗,速度快,指令少,汇编语言灵活等特性,颇受业内好评。
其他如Atmel的AVR系列、Freescal的MC系列、麦肯的MDT系列等都非常优秀且被广泛应用,在此就不一一赘述了。
以下为目前国内最为主流的MCU厂商:(含在华外资及台资,排名不分先后)
1、中颖电子股份有限公司
简介:中颖电子股份有限公司创立于1994年,是一家专注于单片机集成电路设计与销售的高新技术企业,是首批被中国工业及信息化部及上海市信息化办公室认定的IC设计企业,并连续11年被认定为上海市高新技术企业。2012年中颖成功在深市A股创业板上市。
主营业务:8-bit Flash MCU、8-bit OTP/Mask MCU、16-bit DSP、4-bit OTP/Mask MCU
应用领域:家电、白色家电、黑色家电、汽车电子周边、运动器材、医疗保健、四表(水、电、气、暖)、仪器仪表、安防、电源控制、马达控制、工业控制、变频、数码电机、计算机键盘、鼠标、网络音乐(便携式、车载、床头音响)、无线儿童监控器、无线耳机/喇叭/门铃。
2、上海东软载波微电子有限公司
简介:上海东软载波微电子有限公司(前身为上海海尔集成电路有限公司)专注芯片设计16年。从最初专注于研发8位通用MCU,直至现今完成研发并量产的电力线载波通信芯片、无线射频芯片、触控类芯片等不同类型的集成电路产品。2015年被青岛东软载波科技股份有限公司合并。
主营业务:安全芯片、通用芯片(8位 MCU/32位 MCU)、专用芯片、射频无线、触控芯片
应用领域:消费电子、汽摩电子、工业/控制、照明、仪表仪器
3、炬力集成电路设计有限公司
简介:炬力集成电路设计有限公司是全球最大的个人便携多媒体SOC供应商之一,创立于2001年,2005年于美国纳斯达克挂牌上市,是一家致力于集成电路设计与制造的大型半导体技术集团。旗下拥有炬芯(珠海)科技有限公司、上海炬力集成电路设计有限公司、炬才微电子(深圳)有限公司。
主营业务:SOC
应用领域:消费电子
4、盛群半导体股份有限公司
简介:盛群半导体为台湾专业微控制器IC设计领导厂商,营业范围主要包括微控制器IC及其周边元件之设计、研发与销售。
主营业务:电源管理、LCD/LED驱动/控制芯片、超高解晰度指纹辨识Sensor与各类型传感器模块组件
应用领域:语音、通讯、计算机外设、家电、医疗、车用及安全监控
5、深圳市中微半导体有限公司
简介:深圳市中微半导体有限公司是成立于2001年,为设计、制造、测试、应用与销售各种CMOS集成电路及MCU的专业IC设计供应厂商。
主营业务:8Bit MCU、电容式触控型MCU、带LED/LCD显示驱动型MCU、LED恒流照明驱动电路、无线遥控电路、IGBT、通用及专用逻辑电路
应用领域:智能家电、汽车电子、安防监控、LED照明及景观、智能玩具、智能家居、消费类电子
6、上海灵动微电子股份有限公司
简介:上海灵动微电子股份有限公司(股票代码:833448,股票简称:灵动微电)创立于2011年,是国内专注于MCU产品与MCU应用方案的领先供应商,是中国工业及信息化部及上海市信息化办公室认定的集成电路设计企业,同时也是上海市认定的高新技术企业。
主营业务:基于8051、ARM®Cortex®-M0、ARM®Cortex®-M3内核的Flash MCU、OTP MCU、EEPROM MCU
应用领域:工业控制、智能家电、智慧家庭、可穿戴式设备、汽车电子、仪器仪表
7、华润微电子有限公司
简介:华润微电子有限公司是华润集团旗下负责微电子业务投资、发展和经营管理的高科技企业,亦是中国本土规模和影响力最大的综合性微电子企业之一。目前拥有6-8英寸晶圆生产线4条、封装生产线2条、掩模生产线1条、设计公司4家,为国内唯一拥有齐全半导体产业链的企业。
主营业务:集成电路设计、掩模制造、晶圆制造、封装测试及分立器件
应用领域:汽车电子、照明、消费电子、工业控制
8、华大半导体有限公司
简介:华大半导体有限公司(简称华大半导体)是中国电子信息产业集团有限公司(CEC)整合旗下集成电路企业而组建的集团公司。华大半导体是中国十大IC设计企业之一。
主营业务:MCU、智能卡、RFID、模拟电路、北斗导航、显示多媒体
应用领域:工业控制、消费电子、照明
9、瑞萨电子(中国)有限公司
简介:日本瑞萨电子在中国成立了1家设计公司、3家制造公司、9个销售点,员工人数超5000人。瑞萨电子中国以MCU为核心,提供系统LSI、模拟及功率半导体器件等颇具竞争实力的产品。
主营业务:MCU、模拟及功率半导体器件
应用领域:消费电子、汽车电子、移动通信
10、凌阳科技股份有限公司
简介:凌阳科技股份有限公司是全球领先的消费性IC设计公司。2006年,凌阳科技将控制与周边事业群分割成立了凌阳创新科技,专注于研发、制造MCU、光学感知器、RF无线传输晶片、SOC晶片等。
主营业务:液晶IC、微控器IC、多媒体IC、语音、音乐IC及各式ASICs
应用领域:消费电子、工业控制
11、希格玛微电子
简介:希格玛微电子是一家专业集成电路设计企业,于1996年成立深圳公司,1999年成立北京公司,2006年成立香港办事处。目前主要致力于计算机周边产品控制芯片、语音芯片、MCU芯片、触摸芯片、电源管理芯片、功率器件MOS和TGS产品等各种集成电路芯片产品的研究、设计、开发和销售。
主营业务:语音芯片、MCU芯片、PC周边产品控制芯片、触摸芯片、电源管理芯片、功率器件
应用领域:消费电子、工业控制
12、深圳宏晶科技有限公司
简介:宏晶科技是新一代增强型8位单片微型计算机标准的制定者和领导厂商。致力于提供满足中国市场需求的高性能单片机技术,在业内处于领先地位,销售网络覆盖全国。
主营业务:高性能STC系列MCU和SRA
应用领域:消费电子、工业控制
13、合泰半导体(中国)有限公司
简介:合泰半导体成立于2012年,是台湾盛群半导体股份有限公司在大陆的子公司,主要负责盛群产品在中国的研发、生产及销售。
主营业务:MCU
应用领域:工业控制、消费电子、照明、汽车电子
14、深圳贝特莱电子科技股份有限公司
简介:深圳贝特莱电子科技股份有限公司(BetterlifeCorporation)于2011年7月成立,是一家高端集成电路设计国家级高新技术创新型企业,致力于开发具有自主知识产权的核心技术,专注于消费类电子的IC设计,在触控、AMOLED驱动、指纹识别及生命感知产品领域卓有建树。
主营业务:触控芯片、MCU、指纹识别、电极式传感、压力触控
应用领域:智能手机、平板电脑、智能照明
15、联咏科技
简介:联咏科技为台湾IC设计领导厂商,成立于1997年,专注于产品设计、研发及销售。联咏科技于2000年获证期会通过上柜挂牌交易,并于2002年获准于台湾证券交易所上市,股票代号为:3034。
主营业务:驱动IC、MCU
应用领域:消费电子设备、高级电子仪表、安检系统、便携式医疗设备、电机控制、智能卡、无线通信
16、松翰科技
简介:松翰科技成立于1996年,是世界最快速成长消费性ICs领导厂商之一。
主营业务:MCU、全系列各式IC产品
应用领域:消费电子、医疗设备、无线通信
17、新唐科技
简介:新唐科技成立于2008年,同年7月受让分割华邦电子逻辑IC事业部正式展开营运,并于2010年在台湾证券交易所正式上市挂牌。新唐科技专注于开发模拟/混合记号,微控制器及计算机云端相关应用IC产品,相关产品在工业电子、消费电子及计算机市场皆具领先地位。
主营业务:模拟/混合记号、微控制器及计算机云端相关应用IC产品
应用领域:无线通信、汽车电子、消费电子、工业控制
18、北京兆易创新科技股份有限公司
简介:北京兆易创新科技股份有限公司成立于2005年,是一家以中国为总部的全球化芯片设计公司。致力于各类存储器、控制器及周边产品的设计研发。
主营业务:NOR Flash、NAND Flash、MCU
应用领域:消费电子、无线通信
19、义隆电子股份有限公司
简介:义隆电子股份有限公司于1994年成立,是一家专业晶片研发及模组化解决方案的公司,于2001年9月挂牌上市。
主营业务:MCU、通信IC
应用领域:平板电脑、智能手机、MID、GPS、PMP、键盘
20、深圳市沛城电子科技有限公司
简介:深圳市沛城电子科技有限公司成立于2000年,致力于消费类电子产品方案设计、研发及销售。
主营业务:电源管理、分立器件、MCU、音频放大
应用领域:照明、消费电子
21、芯海科技(深圳)股份有限公司
简介:芯海科技是一家专注于物联网电子领域的高性能混合信号集成电路设计企业,为国家级高新技术企业、深圳市第一批自主创新龙头企业和15家重点集成电路设计企业。
主营业务:高精度ADC、低/微功耗MCU、混合信号SOC、工业级高可靠性ASIC设计技术
应用领域:智慧健康(血压计、血糖仪、测脂仪,监护仪等家庭健康检测设备),智慧家居(智能插座,小家电,智慧照明等)、消费电子、仪器仪表、汽车电子
22、深圳联华集成电路有限公司
简介:深圳联华集成电路有限公司是专注于程序防护产品研发与生产的技术型企业。公司拥有国内外领先的程序破解技术和防破解技术,对微控制器系统设计有着深刻的理解和认识。
主营业务:MCU
应用领域:无线通信、可穿戴设备、消费电子
23、华芯微特科技有限公司
简介:华芯微特是一家由国内投资商投资,美国硅谷资深技术团队参股的无晶圆半导体集成电路公司。2009年12月北京华芯微特科技有限公司成立,公司成立后致力于通用和专用MCU研发。
主营业务:通用/专用MCU
应用领域:工业控制、汽车电子、医疗设备、家用电器、LED照明
24、凌通科技股份有限公司
简介:凌通科技成立于2004年,主要研发和销售消费性半导体产品为主,拥有IC电路设计及应用软体设计技术。
主营业务:MCU
应用领域:通讯、遥控器、电子字典、学习机
25、伟诠电子股份有限公司
简介:伟诠电子股份有限公司成立于1989年,是台湾知名的IC设计公司之一,专注于集成电路产品的设计、测试、制造及销售。
主营业务:MCU、SoC
应用领域:影音系统、消费电子、无线通信
26、上海普芯达电子有限公司
简介:上海普芯达电子有限公司成立于2008年,由目录分销商P&S(武汉力源)的创始人和IC产业资深战略投资人共同投资成立,专注于提供工业标准的MCU产品。
主营业务:MCU
应用领域:工业控制、消费电子
27、福建省福芯电子科技有限公司
简介:福芯电子成立于2014年,由福建省电子信息集团和海外Wedjat公司共同出资成立。福芯电子主要针对功率器件进行研发、生产、销售。
主营业务:半导体功率器件
应用领域:消费电子
28、瑞萨电子(中国)有限公司
简介:瑞萨电子公司,是全球首屈一指的闪存微控制器供应商,致力于微控制器、功率MOSFET和模拟IC等产品领域。
主营业务:MCU、模拟IC、MOSFET
应用领域:工业控制、消费电子、无线通信、汽车电子、照明
文章来源: 满天芯