STM32F107VCT6开发板学习问题笔记


使用开发板的USART作为UART通信,在前调用BSP_Init()函数初始化开发板,串口上传输的数据出错:'a'变成0xfa或0xfe;
使用开发板的USART作为UART通信,在前调用BSP_Init()函数初始化开发板,串口上传输的数据出错:'a'变成0xfa或0xfe;

加密方案不可避免要用到随机数,一般的加密都需要随机数参与运算。

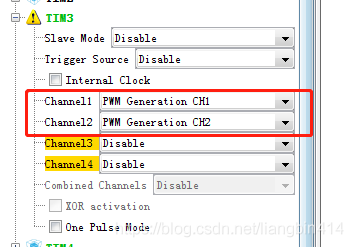
一、配置定时器为PWM产生
二、配置时钟树

本文档是关于ARM® Cortex®-M3内核的低等容量增强型单片机STM32F103x4,STM32F103x6的数据手册, 介绍了它的主要外设资源和电特性参数,外设资源包括:16/32 KB Flash, USB, CAN, 6个定时器, 2个ADC, 6 个通讯接口等。