CKS32F4xx系列ADC多通道DMA电压采集


在上一讲单通道ADC电压采集的基础上,本节主要介绍CKS32F4xx系列产品基于DMA传输的ADC多通道电压采集转换实现。
在上一讲单通道ADC电压采集的基础上,本节主要介绍CKS32F4xx系列产品基于DMA传输的ADC多通道电压采集转换实现。

ADC可以将现实世界中连续变化的模拟量,如温度、压力、流量、速度、光强等,转换成离散的数字量,输入到计算机中进行处理。

本章中,我们主要对CKS32F4xx系列的待机模式(STANDBY)做详细介绍。

本课讲为大家讲解CKS32F4xx系列产品的低功耗模式之睡眠(Sleep)模式。MCU为满足某些应用场景:如小型化低容量设备,长期监测设备等,低功耗应运而生,其中根据需求,用户可以选择睡眠模式、停止模式及待机模式,今天本课将带大家一起配置睡眠模式。

在本章节中,首先向大家介绍电源系统结构,接着简述三种低功耗模式,最后重点介绍CKS32F4xx系列如何进入STOP模式以及使用按键实现中断唤醒。

上一章我们介绍了CKS32F4的通用定时器定时操作的使用方法,这一章我们将向大家介绍通用定时器作为定时器脉冲计数的使用。在本章中,我们将用TIM5的通道1(PA0)来做输入捕获,捕获PA0上的脉冲。

比较输出可以通过比较CNT与CCR寄存器值的关系,来对输出电平进行置1、置0或翻转的操作,用于输出一定频率和占空比的PWM波形,简称脉宽调制,这也是利用微处理器的数字输出来对模拟电路进行控制的一种非常有效的技术。
这一课我们将介绍CKS32F4XX系列产品的定时器使用,CKS32F4XX的定时器功能十分强大,包含2个高级控制定时器,8个普通定时器,2个基础定时器,以及两个看门狗定时器和一个系统定时器,总共15个定时器之多。关于定时器部分内容的讲解我们将分3个部分展开,本节将介绍定时器的基本特征和定时操作。
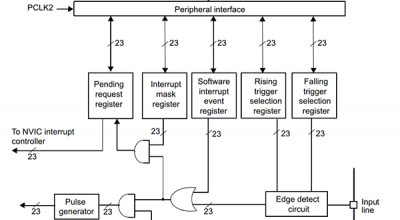
EXTI(External interrupt/event controller)—外部中断/事件控制器,管理了控制器的 23个中断/事件线。每个中断/事件线都对应有一个边沿检测器,可以实现输入信号的上升沿检测和下降沿的检测。EXTI可以实现对每个中断/事件线进行单独配置,可以单独配置为中断或者事件,以及触发事件的属性。

SPI协议是由摩托罗拉公司提出的通讯协议(Serial Peripheral Interface),即串行外围设备接口,是一种高速全双工的通信总线。