基于AVR单片机的数字电子秤的设计

0 引言
为智能硬件开发者、创客提供有关基于英特尔嵌入式处理器的应用技术介绍和合作伙伴方案介绍
0 引言

Σ-ΔA/D技术具有高分辨率、高线性度和低成本的特点。本文基于TI公司的MSP430F1121单片机,介绍了采用内置比较器和外围电路构成类似于∑-△的高精度A/D实现方案,适合用于对温度、压力和电压等缓慢变化信号的采集应用。

1 引言

引 言
运动控制器是运动控制系统的核心部件。目前,国内的运动控制器大致可以分为3类:
第1类是以单片机等微处理器作为控制核心的运动控制器。这类运动控制器速度较慢、精度不高、成本相对较低,只能在一些低速运行和对轨迹要求不高的轮廓运动控制场合应用。
运动控制系统已被广泛应用于工业控制领域。近年来,工业控制对运动控制系统的要求越来越高。传统的基于PC及低端微控制器日渐暴露出高成本、高消耗、低可靠等问题,已经不能满足现代制造的要求 。随着嵌入式技术的日益成熟,嵌人式运动控制器已经初露锋芒。基于ARM技术的微处理器具有体积小、低成本、低功耗的特点,决定其在运动控制领域具有良好的发展前景。

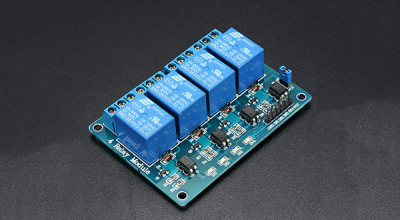
一提到智能家庭,大家可能首先想到的是各种大佬级公司搞的牛逼产品,或者说是创新产品。想想就觉得很复杂,有的用工控机,有的用树莓派,还有的用arduino,不管用什么,都绕不过服务器进行控制,比如yeelink平台,腾讯的智能硬件平台等等。其实,真实实现起来,并没有想想中这么复杂,我们甚至只用一个小的单片机就能实现。
0×01单片机实现web服务器

三极管在数字电路里的开关特性,最常见的应用有 2 个:一个是控制应用,一个是驱动应用。
伪指令不属于单片机的指令系统,而是由汇编器提供的指令,用于调整存储器中程序的位置、定义宏、初始化存储器等。AVR单片机的汇编器共提供18条伪指令(见附表)。

DSP的应用
单片机仿真器是指以调试单片机软件为目的而专门设计制作的一套专用的硬件装置。目前已经得到了广泛的运用,那么单片机仿真器有什么作用?
单片机仿真器发展