必看干货!三极管在单片机中的应用图解


三极管在数字电路里的开关特性,最常见的应用有 2 个:一个是控制应用,一个是驱动应用。
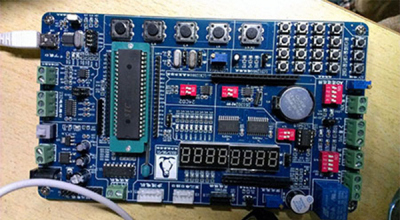
单片机(Microcontroller, MCU)是一种集成了计算机功能的微型计算机,通常由一个微处理器(CPU)、存储器(ROM、RAM)、输入/输出接口、定时器/计数器等功能模块集成在同一芯片上。单片机是一种常用于嵌入式系统中的控制器,它被广泛应用于家电、汽车、工业自动化、医疗设备、消费电子、物联网(IoT)设备等多个领域。
三极管在数字电路里的开关特性,最常见的应用有 2 个:一个是控制应用,一个是驱动应用。

一个线程模拟单片机的定时器中断产生时间片轮询个时钟,另一个线程则模拟主函数中一直运行的时间片轮询调度程序。
在单片机开发中,UART、I2C、RS485等普遍在用,对它们的认识可能模棱两可,本文把它们整理了一下。

在单片机编程中,有很多人会因为一些貌似简单的处理而把问题弄得乱七八糟,如林中蛛网一样,错综复杂。而事实上,根据编程魔法之思想,对程序处理的过程严格划分部门、各施其职、部门内部互不干涉内政,是成功编程的关键。
单片机内部用到很多和电脑功能相类似的模块,像CPU、内存、并行总线、存储数据的存储器等在单片机中都存在,不过不同的是它的这些部件性能相比电脑要弱很多,当然价钱也相对要低不少。
STM32外设很多,为了降低功耗,每个外设都对应着一个时钟,在系统复位的时候这些时钟都是被关闭的,如果想要外设工作,必须把相应的时钟打开。
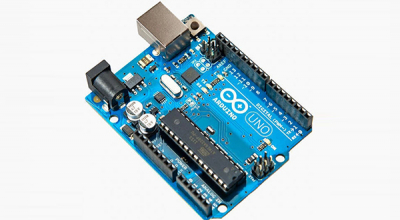
单片机出现的历史并不长,但发展十分迅猛。它的产生与发展和微处理器的产生与发展大体同步,自1971年美国Intel公司首先推出4位微处理器以来,它的发展到目前为止大致可分为5个阶段。
我们这里要说的这个时间片轮询法并不是挂在操作系统下,而是在前后台程序中使用此法,也是本文要详细说明和介绍的方法。

单片机复位电路就好比电脑的重启部分,当电脑在使用中出现死机,按下重启按钮电脑内部的程序从头开始执行。

在选择时就考虑到单片机的内部存储器资源,如能满足要求就不需要进行扩展,在必须扩展时注意存储器的类型、容量和接口,一般尽量留有余地,并且尽可能减少芯片的数量。