MCU是怎样输出PWM波形的?

在电力电子控制中,PWM几乎是无处不在的,不论是AC/DC,DC/AC,还是DC/DC,都涉及到PWM,PWM具体是什么可以自行百度,网上资料非常多,这里就不再赘述。在电力电子变换里面,PWM波形生成有两种方式,模拟和数字,专用的模拟IC不在此文探讨范围之内,本文主要介绍怎样用MCU来生成PWM。
在所有的MCU里,都会有Timer定时器,PWM就是通过这个外设生成的,基本的原理可以通过下图(以STM32F407的寄存器为例)来解释。
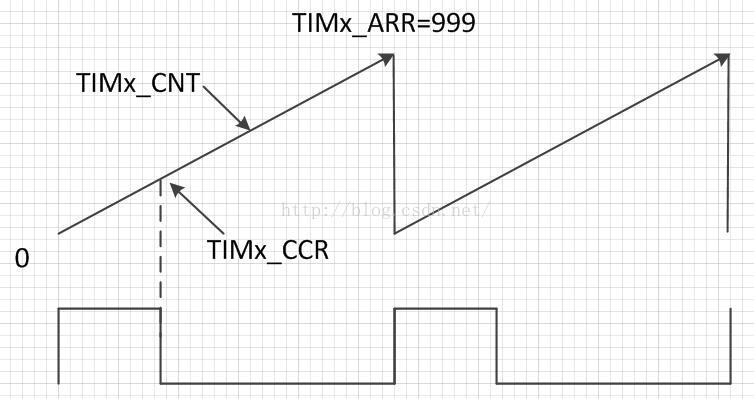
计数器TIM_CNT对输入时钟进行计数,比如输入时钟是1MHz(50%占空比方波),对时钟的每一个上升沿(或者下降沿)从数字0开始计数,计数到TIM_ARR=999,一共计数1000个,经历的时间是1000*1/1000000 = 1ms,也就是1kHz,计数到999之后计数器TIM_CNT归零,重新从0开始计数到999,往复循环,这样就形成了1kHz PWM了。