HOLTEK新推出TinyPower™ 5V/250mA超低静态电流高PSRR HT73Lxx LDO系列


7月13日,Holtek TinyPower™低电压差电源稳压IC新推出HT73Lxx超低静态电流高PSRR系列。该系列产品提供1.35μA超低静态电流,输出电流高达250mA,输出电压精度达±2%。内置过电流和过温度保护功能,另外提供芯片使能引脚,当设置该引脚为低,电流可进一步降至0.1µA,同时此引脚支持输出快速放电功能。工程师可藉由这些功能设计出应用领域更广泛,特性更佳的产品。
7月13日,Holtek TinyPower™低电压差电源稳压IC新推出HT73Lxx超低静态电流高PSRR系列。该系列产品提供1.35μA超低静态电流,输出电流高达250mA,输出电压精度达±2%。内置过电流和过温度保护功能,另外提供芯片使能引脚,当设置该引脚为低,电流可进一步降至0.1µA,同时此引脚支持输出快速放电功能。工程师可藉由这些功能设计出应用领域更广泛,特性更佳的产品。

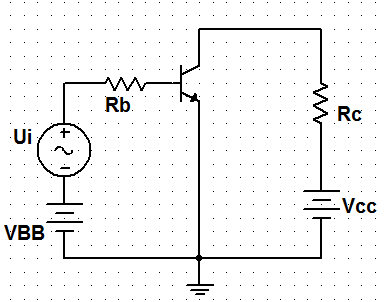
在电子电路中,放大的对象是变化量,放大的本质是在输入信号的作用下,通过有源元件(晶体管或场效应管)对直流电源的能量进行控制和转换,使负载从电源中获得的输出信号能量比信号源向放大电路提供的能量大的多。晶体管放大电路有共射、共集、共基三种接法,场效应管有共源、共漏接法(与晶体管放大电路共射、共集接法相对应)。
以下通过3个主要性能(放大倍数A、输入电阻Ri、输出电阻Ro)指标对晶体管三种基本接法进行比较。
基本共射放大电路:
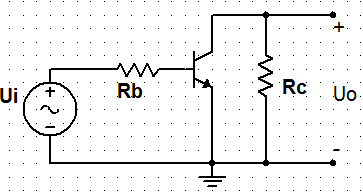
交流通路:
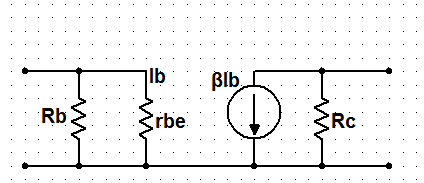
微变信号等效电路:

• 本次收购拟引入TouchGFX高度先进的嵌入式GUI解决方案,扩展STM32生态系统
• TouchGFX产品将加速发展,提高大众市场销量

data:固定指前面0x00-0x7f的128个RAM,可以用acc直接读写的,速度最快,生成的代码也最小。
bit:是指0x20-0x2f的可位寻址区
idata:固定指前面0x00-0xff的256个RAM,其中前128和dATa的128完全相同,只是因为访问的方式不同。
idata是用类似C中的指针方式访问的。

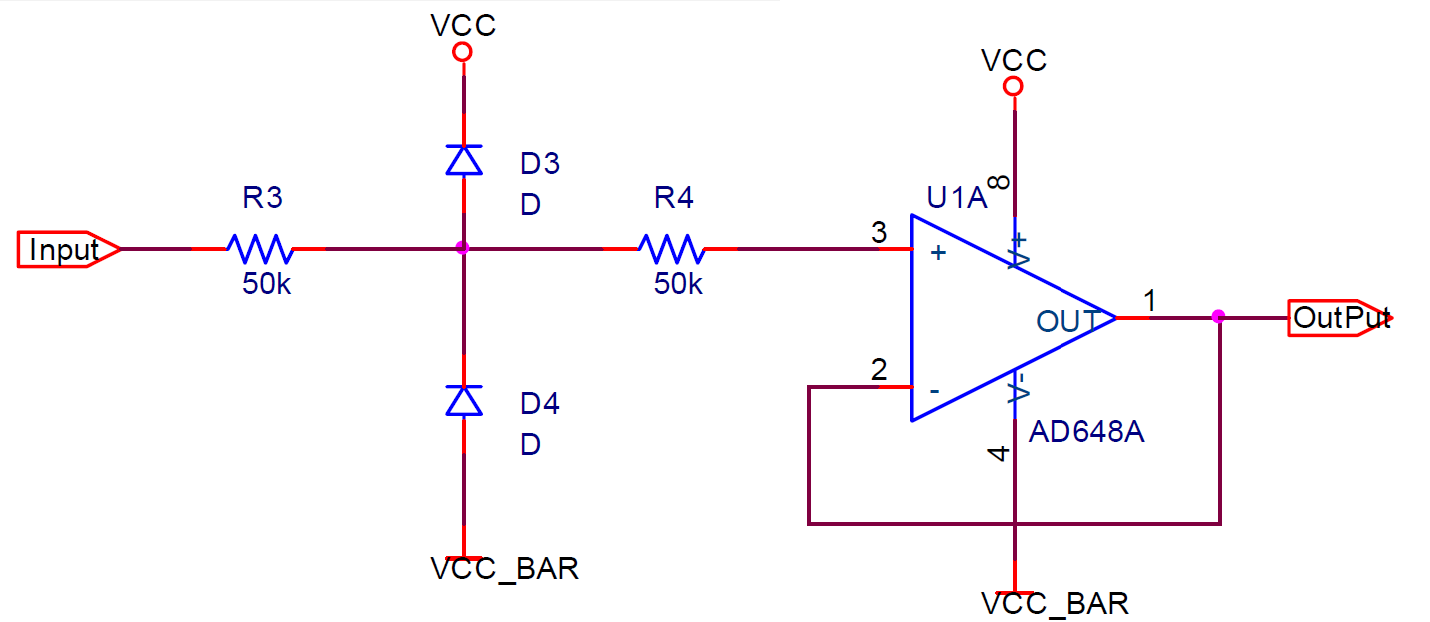
本文介绍了四种模拟输入信号的保护电路的实现方法。
本文仅仅是起到抛砖引玉的作用,一方面希望大家提出宝贵的意见,另外也希望大家自行详细计算有关参数,因为文中的器件参数有可能不合适。
最近由于工作的需要,涉及到了模拟输入信号的保护电路问题。结合以往的工作实践以及网络文献资料的查找。现在就保护电路作一简单的说明。
一、 电源钳位保护
二、TVS 管保护方法

耐用的单芯片解决方案降低汽车3DHMI设计成本
本文档概述了 SAMA5D2 SIP 的主要特性。下表列出了有关 SAMA5D2 和 DDR2-SDRAM 存储器产品信息的独有参考文档。
SAMA5D2 系统级封装(System-In-Package,SIP)集成了基于 Arm® Cortex® -A5 处理器的 SAMA5D2 MPU,单个封装提供最高 1 Gb DDR2-SDRAM。

随着高新技术的发展,机器人在各个行业,各个领域的使用率节节攀升。而机器人的发展,于嵌入式计算机为核心的嵌入式系统是密不可分的。目前,嵌入式系统在机器人控制系统被广泛采用。
嵌入式控制器越来越微型化、功能化。微型机器人、特种机器人等也获得更大的发展机遇,无论从控制系统的结构还是机器人的智能程度方面都得到了很大的提高。以索尼的机器狗为代表的智能机器宠物是最典型的嵌入式机器人控制系统,除了能够实现复杂的运动功能,它还具有图像识别、语音处理等高级人机交互功能,它可以模仿动物的表情和运动行为。火星车也是一个典型例子,这个价值10亿美金的技术高度密集移动机器人,采用的是VxWorks 操作系统,它可以在不与地球联系的情况下自主工作。下面从运动控制系统、远程控制、视频监控系统三个方面分析嵌入式系统在机器人中的应用情况。
运动控制系统
机器人的运动控制部分一般采用ARM 7来完成,主要是由于整个系统对实时性要求较高,利用ARM 7来专门控制伺服能更好的满足要求。

• 先进的惯性传感器为汽车导航、车载信息服务和高度自动驾驶系统提供高精度的航位推算功能
• 单片集成3轴加速度计和3轴陀螺仪,全程采用意法半导体独有的MEMS工艺,产品质量领先市场,供应链安全保证,免除客户后顾之忧
与传统USC封装相比,新封装设计热阻降低50%
东芝电子元件及存储装置株式会社(“东芝”)宣布推出一款新型肖特基势垒二极管产品“CUHS10F60”。该器件主要面向电源电路整流和回流预防等应用。量产和出货即日启动。