
随着锂电池应用越来越普及,市场上手持式电动工具也越来越多,目前手持式电动工具以有刷或有感方案为主,然而无刷无感方案因其诸多优点,市场占比不断提高,未来成为主流是大概率事件。
不过,某些类型的电动工具目前的无感化方案使用体验与有感方案差异较大,主要是因为无感方案大都基于反电动势来估计转子位置,在启动性能上不及有感方案;在堵转、受迫倒转等情形下则无法工作,只能停机。
以此为契机,中颖独立自研了基于SH79F2204的无感电动工具方案,利用与转速无关的凸极效应,很好的解决了上述问题。力求使无感方案与有感方案拥有几乎相同的体验。(受迫倒转的解决算法已申请发明专利。)
一、主控芯片简介:
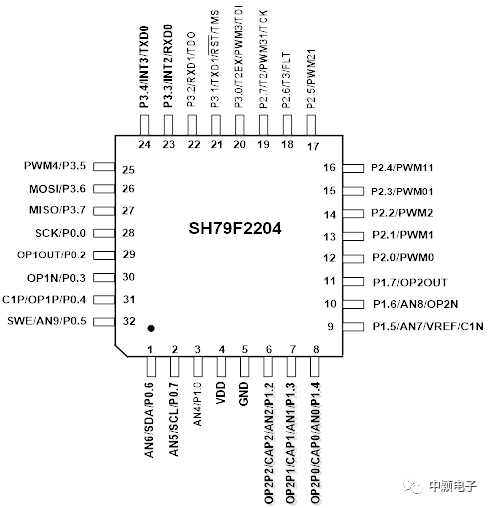
SH79F2204的引脚图:
SH79F2204的主要特性:
-
基于8051指令流水线结构的8位单片机
- 最高48MHz系统工作频率
-
集成算术协处理器(MDU+CORDIC+SVPWM)
- 单周期32bit硬件移位单元
- 单周期16 × 16bit硬件乘法
- 9周期32 ÷ 16bit硬件除法
- 单周期32bit+32bit加法
- 硬件CORDIC协处理器(圆函数)
- 两套操作数结果寄存器组可切换
- Q格式数据乘法/除法自动移位
- 可选带饱和的乘加运算
- 带移相功能的SVPWM生成支持五段式和七段式
- 可硬件实现FOC算法所需的低通滤波、PI控制和坐标变换
-
Program ROM(Flash):32K字节
-
Program RAM: 8K 字节
-
Data RAM:1.5K字节
-
类EEPROM:最大1K字节
-
工作电压:
- fSYS=128K-48MHz,VDD=2.4V- 5.5V
-
高频振荡器:
- 内部RC高频振荡器:8MHz(全范围1%精度)
- 内部集成无需外接电容的PLL,最高输出48MHz
-
低频振荡器:内部RC低频振荡器:128KHz
-
30个CMOS双向I/O管脚
-
I/O内建上拉电阻
-
3个16位定时器/计数器T2/T3/T4
-
三路捕捉功能,保存捕捉触发条件下的捕捉定时器值
-
脉冲宽度调制模块(MCM)
- 8路(4对)16位PWM输出,每对支持互补或独立模式,输出极性可单独控制
- 3种计数模式,单次计数模式,边沿对齐模式,中心对齐模式(中心对齐互补模 式下支持对称和非对称波形)
- 带死区产生逻辑及故障检测功能- PWM周期内可设置多个时刻硬件触发ADC功能- 可设置后分频系数
- PWM管脚顺序可选(代码选项)
- 中断源:
- 定时器2/3/4
- 外部中断2、3
- 捕捉中断0/1/2
- ADC
- EUART0、1,SPI&TWI
- MCM模块PWM周期,归零和各路占空比中断
- 模拟比较器1/2
- PWM4周期中断
-
9+3通道12位1M sps高速模数转换器(ADC),自动触发ADC功能,12通道转换结果缓冲功能
-
内建多输入模拟施密特比较器器CMP1(可使用AVDD分压值作为比较基准)
-
内建两个高速模拟放大器OP1/2,OP2可当作多输入比较器CMP2使用
-
2套增强型UART:UART0、UART1
-
1路8bit无死区PWM输出PWM4
-
SPI接口(主/从模式)
-
双线串行接口TWI(主模式)
-
内建的低电压复位功能(取决于代码选项)
- LVR电压1:4.1V
- LVR电压2:2.5V
-
CPU机器周期:1振荡周期
-
看门狗定时器(WDT)
-
内建振荡器预热计数器
-
低功耗工作模式:空闲模式&掉电模式
-
Flash型
-
40位可读MCU识别码
-
工作环境温度-40~+105℃
-
单线仿真接口(同时支持四线仿真接口,两套仿真口管脚不复用)
-
针对PRAM的CRC校验模块
-
封装:LQFP32
SH79F2204内部方框图:
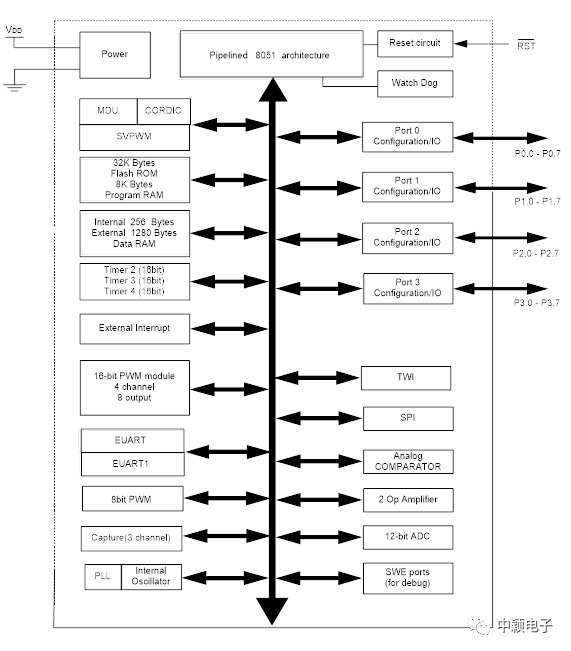
以上可知,SH79F2204内部资源强大,运算高效。基于此芯片可以采用ADC采样反电动势的方案,相对采用比较器的方案,软件参与度更高,也因此对于不同种类的电动工具应用都能很好的适应。
二、电机控制算法简介:
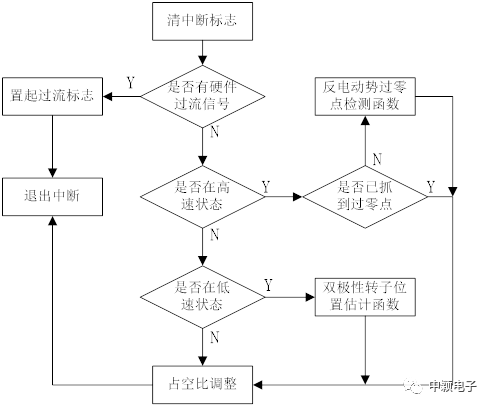
1)程序状态切换逻辑
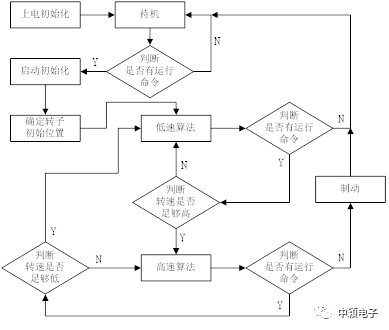
无感有制动方案(电钻、电扳手等)状态切换流程图:
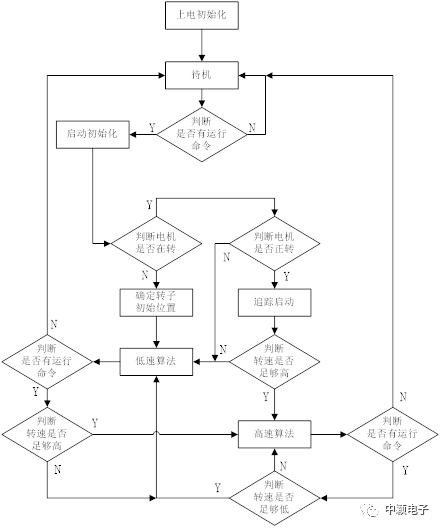
无感无制动方案(角磨机,电锯类等)状态切换流程图:
2)电机控制逻辑:
电机的控制主要在两个中断程序中完成:载波中断和换相中断。
载波中断程序流程图:
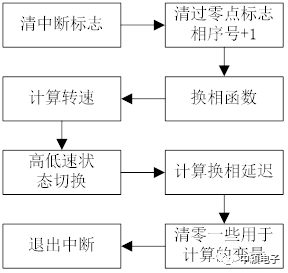
换相中断程序流程图:
三、方案的性能优势:
1)全速度范围内高效运转
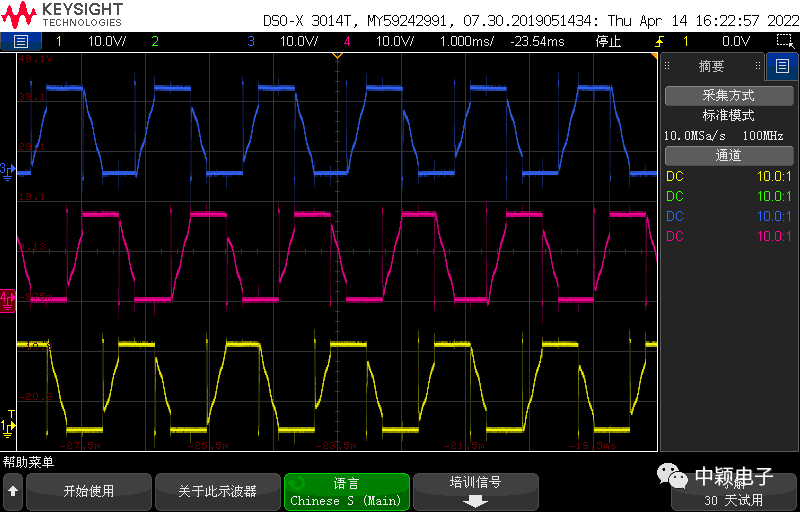
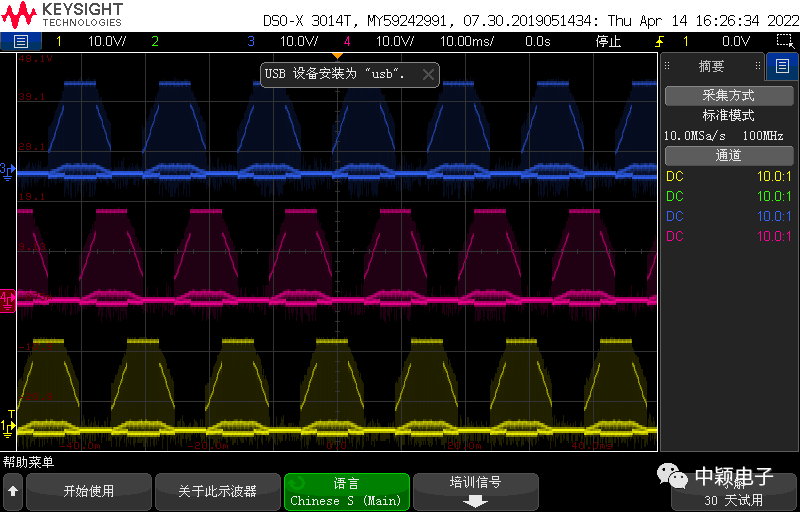
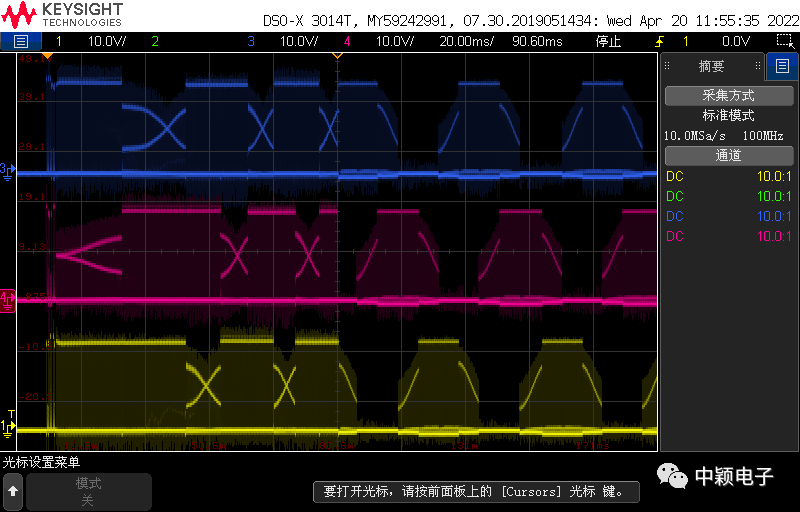
对于BLDC控制方案,梯形波是否对称是电机效率的最重要指标,中颖方案采用ADC采样反电动势捕捉过零点,在每个载波内对不通电相反电动势进行多次采样,并对采样到的值做多种判断,得出准确的反电动势过零点。并通过不同的转速计算不同的延迟时间,实现准确换相。以下是电机运行时三相端电压的波形图。
高速(满占空比)情形的波形:
低速(占空比<10%)情形的波形:
2)启动、堵转和受迫倒转
目前电动工具应用的算法有两个难点。
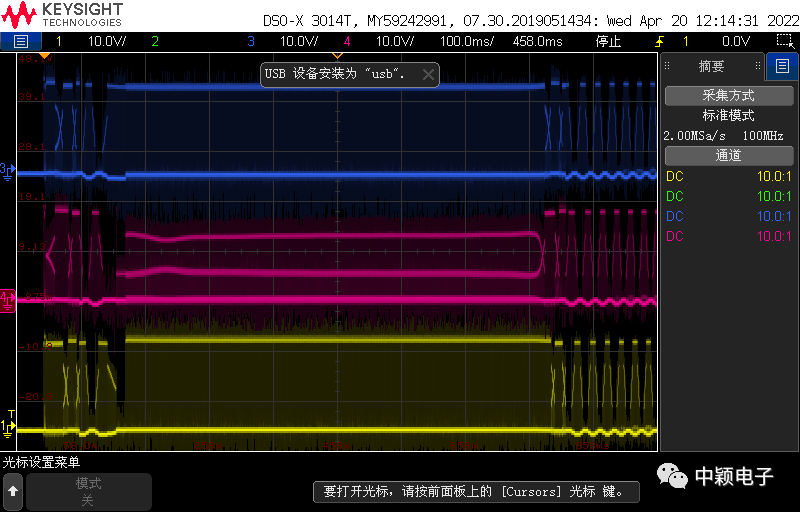
一是启动、堵转等0速情形:有感方案依据霍尔传感器来确定转子位置,与电机转速无关,因此在如电钻类工具发生堵转时,电机可以始终输出向前的力矩。而无感方案依据反电动势来确定转子位置, 0速情形下反电动势很小或为0。目前主流的无感方案大都依靠响应极快的速度闭环来实现较好的启动效果,并将堵转作为一种故障来处理,一旦发生立即停机。基于这类方案的电动工具不仅在某些使用场景无法胜任,而且对于用惯有感甚至有刷方案的用户来说体验不佳。下图是一次启动的三相端电压波形:
下图是“启动—堵转—释放再启动”这一过程的波形:
二是受迫倒转情形,当电机的电磁转矩小于外部施加的反向力,比如链锯卡在木料中时,使用者可能会来回拖拽锯柄。这种情形下有感或有刷方案允许电机跟着倒转,并始终输出向前的力矩,但依靠反电动势的无刷方案只能停机。
中颖基于SH79F2204的无感电动工具方案利用与转速无关的凸极效应,很好的解决了上述问题,使无感方案与有感方案拥有几乎相同的体验。
3)极快的调速响应
为满足绝大多数电钻或电扳手的启动要求,中颖方案从电机启动到占空比加满只需40ms,启动成功率100%。
4)超低转速
中颖方案低速算法的另一个好处是占空比理论上可从0开始无极调速,下面的视频中给定占空比为2%。
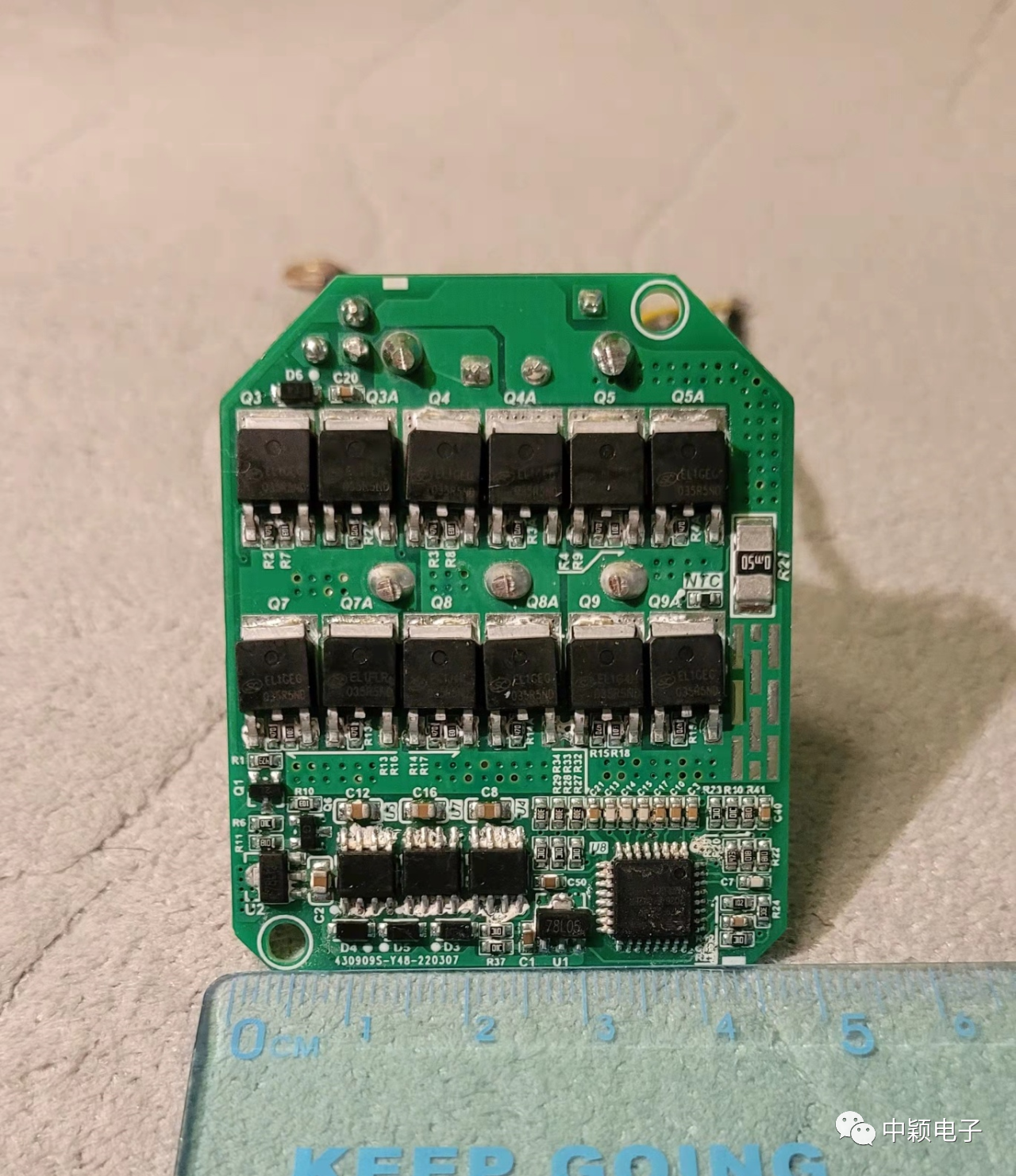
5)系统高度集成化
SH79F2204内部集成比较器和运放等模拟器件,可减少芯片外部的元器件,使PCB板尺寸更小,更适应手持式电动工具对小巧的要求,下图是一个12管方案的PCB实物照片:
来源: 中颖电子
免责声明:本文为转载文章,转载此文目的在于传递更多信息,版权归原作者所有。本文所用视频、图片、文字如涉及作品版权问题,请联系小编进行处理(联系邮箱:cathy@eetrend.com)。