
智能门锁的发展,经历了密码锁,指纹锁,联网锁,人脸智能锁几个重要的发展阶段。2022年,3D人脸识别已经成为各主流智能门锁品牌高端产品的标配,并快速得到了消费群体的认可与接受。为此,恩智浦3D结构光人脸识别方案也应运而生。

纵观整个行业,目前的人脸识别智能门锁主要有如下几个技术路线:
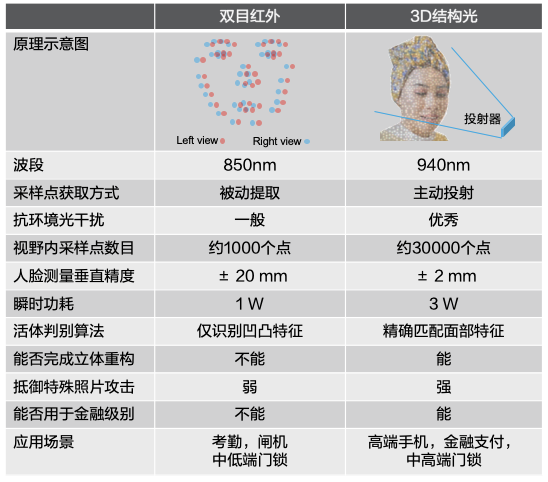
01、双目红外镜头方案
02、3D结构光镜头方案
03、ToF镜头方案
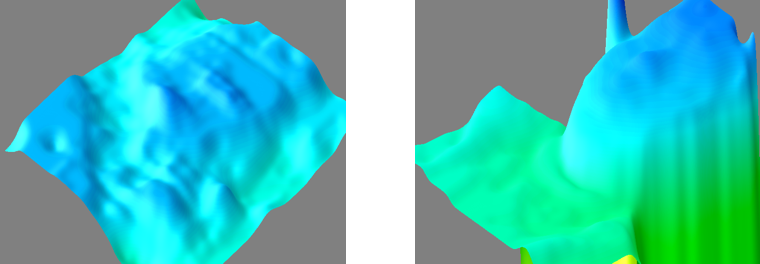
其中,双目红外镜头就严格意义来说,其并不是真3D方案。由于其原理是被动提取人脸若干个特征点,因此不能够完整的重现人脸3D模型,抗假体攻击能力不如3D结构光和ToF方案好。
在现阶段,3D结构光与ToF镜头相比,在识别精度,可视角度等方面均有优势,因此,恩智浦优先推出了采用3D结构光的人脸识别方案。
关于双目红外和3D结构光的特性与实际效果的对比,我们做了如下测试与分析:
恩智浦3D结构光方案
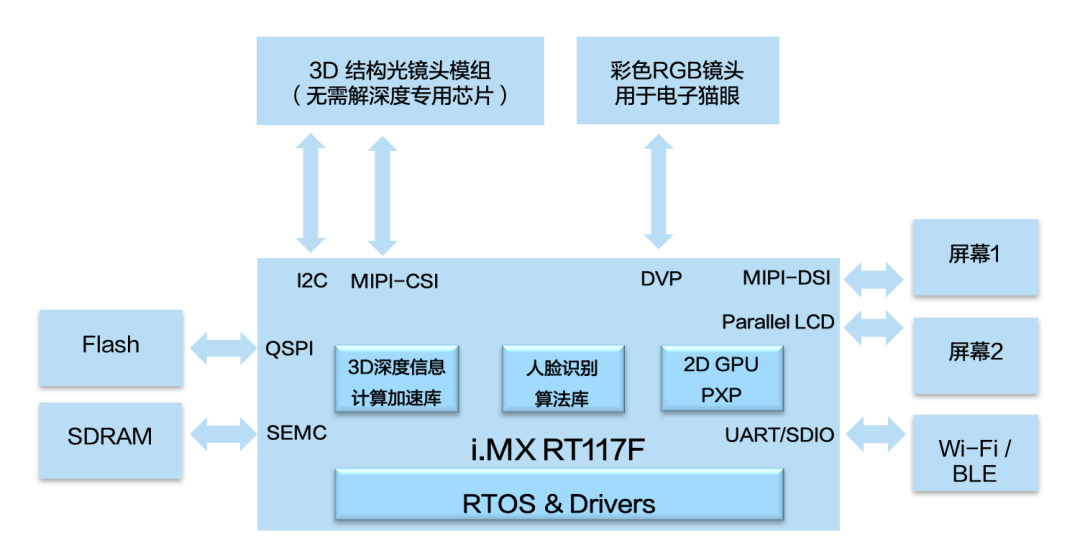
在3D结构光方案中,如何根据接收到的散斑信息,求解深度,实现3D视觉,是一个关键算法。业界3D结构光镜头模组供应商普遍的做法是内置一颗专用求解深度的ASIC芯片,然而这样会增加功耗与成本,对锁体的散热结构设计也不利。
恩智浦为了降低客户的系统成本,提高可靠性,携手业内合作伙伴,将求解深度的算法移植到了恩智浦高性能微控制器i.MX RT117F上,结合恩智浦人脸识别算法,构建出一套完整的真3D人脸识别方案。
恩智浦此次携手合作伙伴推出的真3D人脸识别方案,具有如下特点:
-
核心芯片采用恩智浦高性能MCU i.MX RT117F
-
具有快速启动及低功耗特性, 具有成熟的软件生态和量产经验
-
能够计算人脸完整3D特性,无需镜头内置专用深度计算芯片,具有更好的成本优势
-
- 采用940nm波长,相比于850nm波长,能够更好的抵抗环境光,太阳光的干扰
- 经恩智浦eIQ软件工具优化的人工智能算法
- 算法执行在本地,数据安全可控,保护用户隐私
- 支持无线连接,可以通过手机APP进行操作管理
- 低功耗,模块高低温适应性强
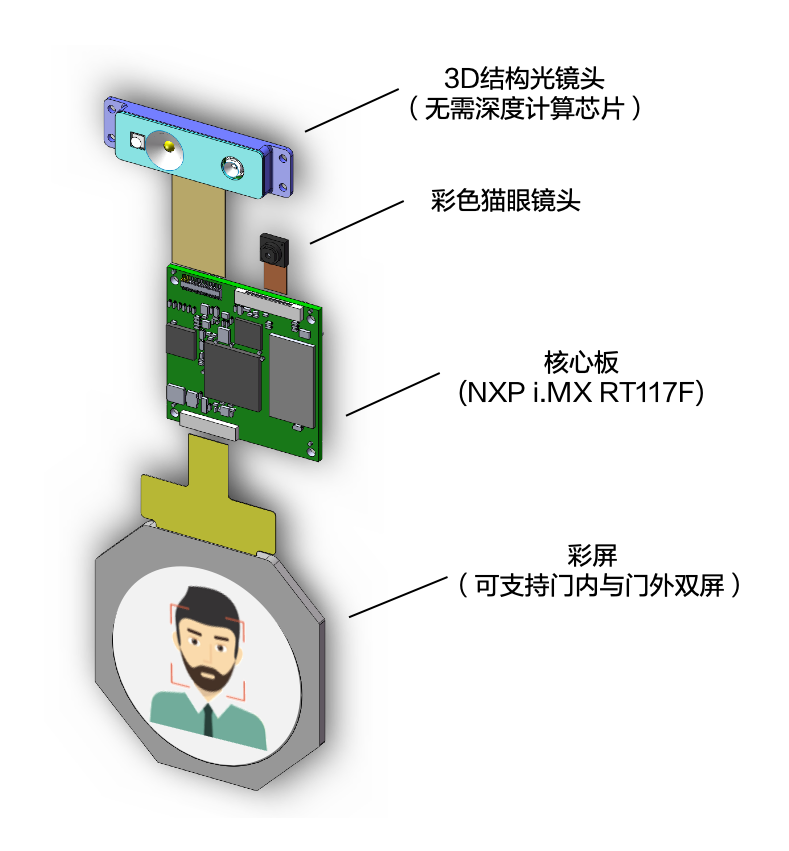
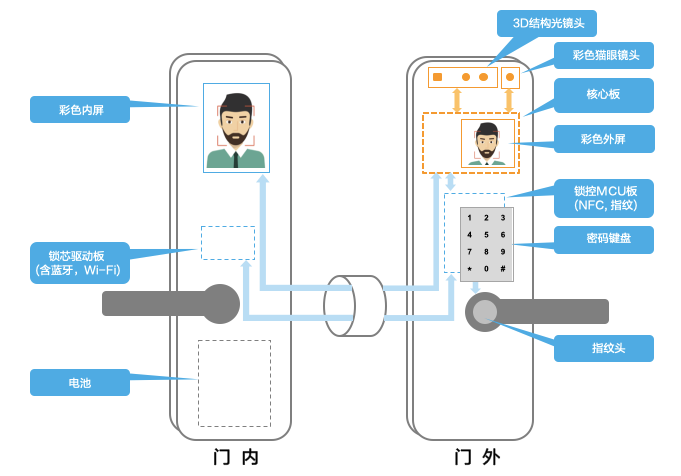
整机参考设计
恩智浦一直以来致力于为客户提供更好的服务,缩短客户设计周期,全面赋能边缘计算与AI落地。为此,基于上述模块,恩智浦提出的整机设计参考建议如下:
来源:NXP客栈
免责声明:本文为转载文章,转载此文目的在于传递更多信息,版权归原作者所有。本文所用视频、图片、文字如涉及作品版权问题,请联系小编进行处理(联系邮箱:cathy@eetrend.com)。