实战经验 | STM32CubeMX生成时钟获取函数的分析


不同的版本在生成代码中的主要区别,主要是D1CorePrescTable这个数组的内容有变化。
不同的版本在生成代码中的主要区别,主要是D1CorePrescTable这个数组的内容有变化。

通过在STM32CubeMX工具添加STM32Cube扩展包集成嵌入式软件块,简化创建软件包工程的过程。
本文将详细介绍如何快速上手RT-Thread Nano,并指导大家在STM32CubeMX上进行项目配置和开发。一起来看看吧!

本文档介绍如何使用STM32CubeMX创建LoRa节点的应用。
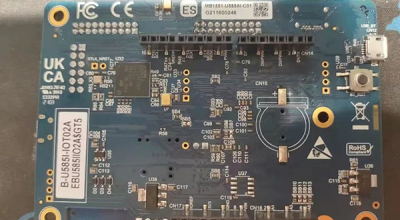
B-U585I-IOT02A开发板是基于 STM32U585AI 微控制器的功能强大的开发平台,内置 Arm® Cortex®-M33 内核、具备Arm® TrustZone® 安全架构,以及多种智能外设资源。

STM8CubeMX是一个图形工具,它可以非常容易地配置STM8微控制器并生成相应的配置报告,方便软件、硬件工程师查阅配置信息。


目前,越来越多的应用需要扩展外部的Flash来满足存储需求。那么,在调试及批量生产的过程中,需要对外扩的Flash进行烧录操作。

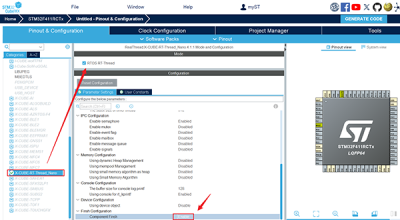
STM32CubeMX 入门介绍,包括软件的配置和C代码的生成

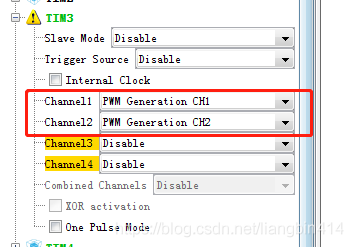
一、配置定时器为PWM产生
二、配置时钟树

一些应用中,涉及到对存储设备的数据访问,例如 uSD 卡、U 盘。具备 USB OTG 控制器的 STM32,可以实现对 U 盘访问的支持。本文介绍 STM32 对于 U 盘访问的硬件/软件实现。介绍如何利用 STM32CubeMX,一步一步实现 STM32 访问U 盘。仅需要简单的几个步骤, 实现 U 盘访问的应用开发。