本文我们来学习下STM32的待机唤醒功能。要实现的功能是:系统运行时 D1 指示灯闪烁,5 秒后进入待机模式,D1 指示灯熄灭,同时串口 printf输出相关提示信息,可通过 K_UP 按键实现唤醒。学习本内容可以参考《STM32F10x中文参考手册》-4 电源控制器(PWR)章节。
STM32低功耗模式介绍
很多单片机具有低功耗模式,比如 MSP430、STM8L等。我们的STM32也不例外,相关文章:STM32低功耗模式。默认情况下,系统复位或上电复位后,微控制器进入运行模式。在运行模式下,HCLK 为 CPU 提供时钟,并执行程序代码。当 CPU 不需继续运行(例如等待外部事件)时,可以利用多种低功耗模式来节省功耗。用户需要根据最低电源消耗、最快速启动时间和可用的唤醒源等条件,选定一个最佳的低功耗模式。
当然在运行模式下,也可以通过如下方式降低功耗:
(1)降低系统时钟速度
(2)不使用 APBx 和 AHB 外设时,将对应的外设时钟关闭
STM32 提供了 3 种低功耗模式,以达到不同层次的降低功耗的目的,这三种模式如下:
(1)睡眠模式( CM3 内核停止工作,外设仍在运行)
(2)停止模式(所有时钟都停止)
(3)待机模式( 1.8 V 内核电源关闭)
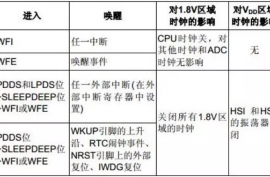
这三种模式所需的功耗是逐级递减,也就是说待机模式功耗是最低的。三种低功耗模式汇总表如下图所示:
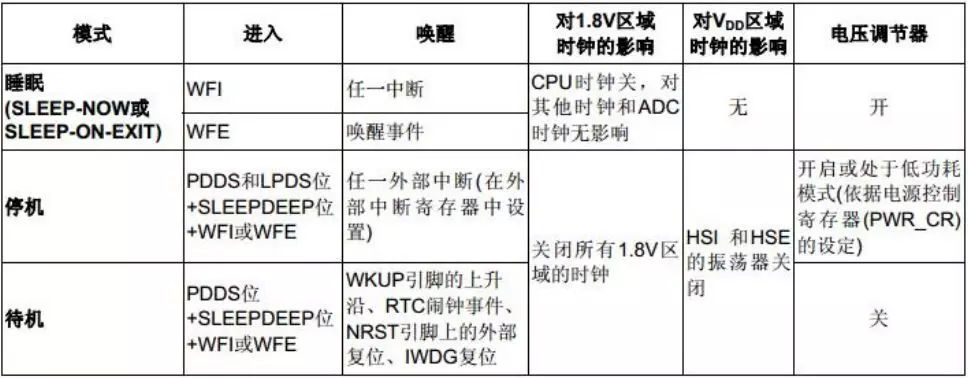
我们仅对 STM32 的待机模式进行介绍,其他 2 种模式可以参考《STM32F10x 中文参考手册》-4电源控制器(PWR)章节,里面有详细的介绍。
(1)待机模式
在睡眠模式中,仅关闭了内核时钟,内核停止运行,但其片上外设, CM3 核心的外设全都照常运行。在停止模式中,进一步关闭了其它所有的时钟,于是所有的外设都停止了工作,但由于其 1.8V 区域的部分电源没有关闭,还保留了内核的寄存器、内存的信息,所以从停止模式唤醒,并重新开启时钟后,还可以从上次停止处继续执行代码。在待机模式中, 它除了关闭所有的时钟, 还把 1.8V 区域的电源也完全关闭了,也就是说,从待机模式唤醒后,由于没有之前代码的运行记录,只能对芯片复位,重新检测 BOOT 条件,从头开始执行程序。低功耗开发相关文章:STM32低功耗开发时,需要注意的GPIO配置问题。
那么我们如何进入待机模式呢?其实很简单,只要按下图所示待机模式进入与退出步骤的步骤执行就可以了。
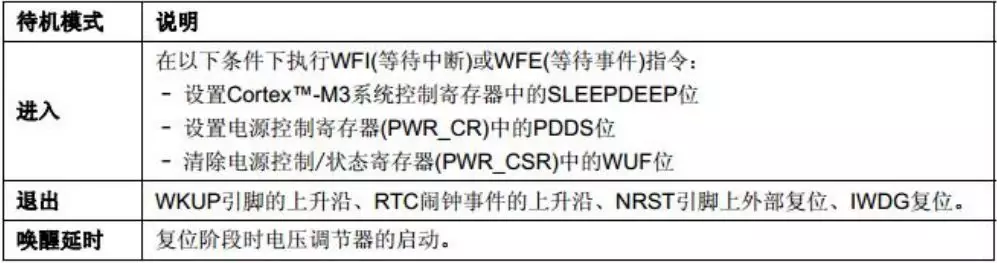
上图还列出了退出待机模式的操作,当检测到外部复位(NRST 引脚)、
IWDG 复位、 WKUP 引脚上升沿、 RTC 闹钟事件的上升沿时,微控制器退出待机模式。本文我们是通过 WKUP 引脚(PA0)上升沿来退出待机模式,当然也可以直接通过芯片复位管脚 NRST退出。
从待机模式唤醒后,除了电源控制/状态寄存器(PWR_CSR),所有的寄存器豆被复位,程序将按照复位(启动引脚采样、复位向量已获取等)后的方式重新执行。电源控制/状态寄存器(PWR_CSR)将会指示内核由待机状态退出。
在进入待机模式后,除了复位引脚以及被设置为防侵入或校准输出时的
TAMPER (PC13)引脚和被使能的唤醒引脚( WK_UP 脚(PA0)),其他的 IO 引脚都将处于高阻态。
由于篇幅限制,本文并没有对待机模式相关寄存器进行介绍,大家可以参考《STM32F10x 中文参考手册》-4 电源控制器(PWR)章节,里面有详细的讲解。如果看不懂的可以暂时放下,因为我们使用的是库函数开发。
待机模式配置步骤
接下来我们介绍下如何使用库函数进入和退出待机模式。这个也是在编写程序中必须要了解的。
具体步骤如下:(电源管理相关库函数在 stm32f10x_pwr.c和 stm32f10x_pwr.h 文件中)
(1)使能电源时钟
因为低功耗模式是通过 STM32 电源(PWR)系统进行管理的,所以需要使能电源时钟,调用的库函数为:
RCC_APB1PeriphClockCmd(RCC_APB1Periph_PWR,ENABLE);//使能 PWR 外设时钟
(2)设置 WK_UP 引脚为唤醒源
待机唤醒方式有很多种,我们选择 WK_UP 引脚(PA0)上升沿来退出待机模式。在库函数中,设置使能 WK_UP 用于唤醒 CPU 待机模式的函数是:
PWR_WakeUpPinCmd(ENABLE);
因为按键 K_UP 连接在PA0 管脚上,并且是高电平有效,这样一来就可以使用 K_UP按键来退出待机模式。
(3)进入待机模式
进入待机模式, 首先要设置 SLEEPDEEP 位 ( 详见 《 Cortex M3 权威指南(中文)》 , chpt13 Cortex-M3 的其它特性--电源管理章节) ,接着我们通过 PWR_CR设置 PDDS 位,使得 CPU 进入深度睡眠时进入待机模式,最后执行 WFI 指令开始进入待机模式,并等待 WK_UP 中断的到来。整个操作可以通过一个库函数完成,如下:
PWR_EnterSTANDBYMode();//进入待机模式
通常在进入待机模式前,我们会清除唤醒标志,以等待下次进入。清除唤醒标志库函数为:
PWR_ClearFlag(PWR_FLAG_WU);//清除 Wake-up 标志
以上几步全部配置好后,我们就可以正常进入待机模式了,并且可以通过按键 K_UP或者复位按键唤醒。
特别提醒下,如果学到 RTC 实时时钟实验的时候,需要进入待机模式,如果使能了 RTC 闹钟中断的时候,进入待机模式前,必须按如下操作处理:
1.禁止 RTC 中断( ALRAIE、 ALRBIE、 WUTIE、 TAMPIE 和 TSIE 等)。
2.清零对应中断标志位。
3.清除 PWR 唤醒(WUF)标志(通过设置 PWR_CR 的 CWUF 位实现)。
4.重新使能 RTC 对应中断。
5.进入低功耗模式。
本实验使用到硬件资源如下:
(1)D1 指示灯
(2)串口 1
(3)K_UP 按键
D1指示灯、K_UP 按键、串口 1 电路在前面章节都介绍过,这里不多说。D1指示灯用来提示系统正常运行,K_UP 按键用来唤醒待机模式,串口 1 用来输出提示信息。
所要实现的功能是:系统运行时 D1 指示灯闪烁,5 秒后进入待机模式,D1 指示灯熄灭,同时串口 printf 输出相关提示信息,通过 K_UP 按键实现唤醒。
程序框架如下:
(1)配置进入与退出待机模式
(2)编写主函数
前面介绍待机模式配置步骤时,就已经讲解如何配置。下面我们打开“待机唤醒实验”工程,在 APP 工程组中可以看到添加了wkup.c文件(里面包含了待机模式驱动程序),在 StdPeriph_Driver 工程组中添加了 stm32f10x_pwr.c 库文件。电源系统管理相关操作的库函数都放在stm32f10x_pwr.c 和 stm32f10x_pwr.h 文件中,所以使用到电源系统管理就必须加入 stm32f10x_pwr.c 文件,同时还要包含对应的头文件路径。
这里我们分析几个重要函数,其他部分程序大家可以打开工程查看。
待机模式配置函数
要让系统进入待机模式,我们必须对它进行配置。进入待机模式代码如下:
/****************************************************************
* 函 数 名 : Enter_Standby_Mode
* 函数功能 : 进入待机模式
* 输 入 : 无
* 输 出 : 无
*****************************************************************/
void Enter_Standby_Mode(void)
{
RCC_APB1PeriphClockCmd(RCC_APB1Periph_PWR,ENABLE);//使能 PWR 外设时钟
PWR_ClearFlag(PWR_FLAG_WU);//清除 Wake-up 标志
PWR_WakeUpPinCmd(ENABLE);//使能唤醒管脚 使能或者失能唤醒管脚功能
PWR_EnterSTANDBYMode();//进入待机模式
}
该函数首先使能电源PWR时钟,然后清除唤醒标志位,并使能 WK_UP管脚为唤醒方式,最后进入待机模式。这一过程在前面步骤介绍中已经提了。
主函数
配置待机模式后,我们就可以编写主函数,代码如下:
/****************************************************************
* 函 数 名 : main
* 函数功能 : 主函数
* 输 入 : 无
* 输 出 : 无
*****************************************************************/
int main()
{
SysTick_Init(72);
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); //中断优先级分组 分2 组
LED_Init();
USART1_Init(9600);
while(1)
{
printf("time: 5\r\n");
led1=0;
delay_ms(1000); //隔 1 秒显示计数
printf("time: 4\r\n");
led1=1;
delay_ms(1000);
printf("time: 3\r\n");
led1=0;
delay_ms(1000);
printf("time: 2\r\n");
led1=1;
delay_ms(1000);
printf("time: 1\r\n");
led1=0;
delay_ms(1000);
printf("进入系统待机模式\r\n");
Enter_Standby_Mode();
}
}
主函数实现的功能很简单,首先调用之前编写好的硬件初始化函数,包括
SysTick 系统时钟,中断分组,LED 初始化等。然后进入 while 循环,每间隔一秒让 printf 输出一个信息,同时指示灯状态发生变化。倒计 5 秒钟后,调用函数 Enter_Standby_Mode进入待机模式,此时指示灯熄灭。
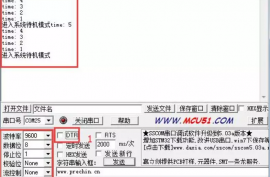
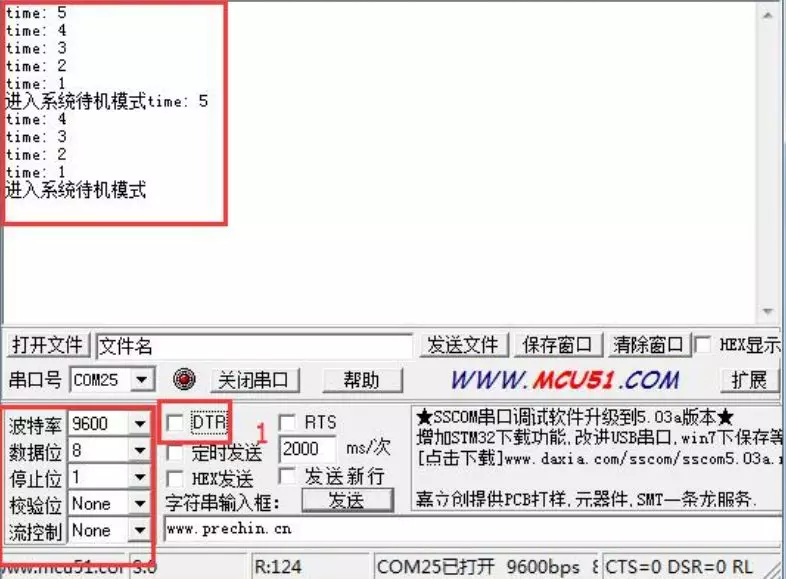
将工程程序编译后下载到开发板内,可以看到系统运行时 D1 指示灯不断闪烁,5 秒钟后进入待机模式,此时 D1 指示灯熄灭。当按下 K_UP 按键或复位按键时,待机模式被唤醒,系统重新运行,同时串口打印提示信息。如果想在串口调试助手上看到输出信息,可以打开“串口调试助手”,首先勾选下标号 1 DTR 框,然后再取消勾选。这是因为此串口助手启动时会把系统复位住, 通过 DTR 状态切换下即可。然后设置好波特率等参数后,串口助手上即会收到 printf发送过来的信息。(串口助手上先勾选下标号1 DTR框,然后再取消勾选)如下图所示。
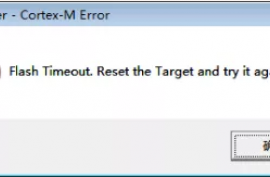
实验说明:下载待机唤醒实验程序后,若使用普中 ARM 仿真器下载其他的程序会出现报警,这是因为处于低功耗模式时,所有外设时钟都已关闭,所以需要在下载程序前先复位下系统。
来源:STM32嵌入式开发
免责声明:本文为转载文章,转载此文目的在于传递更多信息,版权归原作者所有。本文所用视频、图片、文字如涉及作品版权问题,请联系小编进行处理(联系邮箱:cathy@eetrend.com)。