在Ubuntu上开发基于先楫MCU的RT-Thread应用指南


本文从介绍基于Ubuntu的RT-Thread开发环境的搭建开始,结合先楫RT-Thread BSP v1.10的新特性.......
本文从介绍基于Ubuntu的RT-Thread开发环境的搭建开始,结合先楫RT-Thread BSP v1.10的新特性.......

近日,兆易创新(GigaDevice)宣布与国内知名嵌入式操作系统睿赛德科技(RT-Thread)达成战略合作,成为RT-Thread高级合作伙伴,这标志着双方在嵌入式系统生态建设领域的协同迈入全新阶段。

在STM32软件开发中,不当的指针操作,尤其使用未经初始化的指针可能会引起莫名奇妙的问题,所以在使用指针变量的时候,需要注意指针地址的正确性。

当谈到微控制器(MCU)和人工智能(AI)的结合,我们进入了一个激动人心的领域。传统上,AI应用程序需要大型计算机或云服务器的处理能力,但随着技术的发展,现在可以将AI嵌入到微控制器中。这为嵌入式系统、物联网设备、机器人和各种其他应用开启了新的可能性。

近日瑞萨电子宣布推出业界首款基于Arm® Cortex®-M85处理器的 RA8系列MCU,提供卓越的6.39 CoreMark/MHz性能,可满足工业自动化、家电、智能家居、消费电子、楼宇/家庭自动化、医疗和AI领域的各种计算密集型应用。
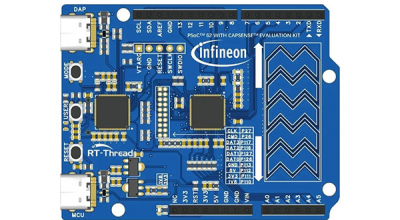
近日,英飞凌联合 RT-Thread 共同发布了PSoC™ 62 with CAPSENSE™ evaluation kit开发板(以下简称PSoC 6 RTT开发板),其默认内置物联网操作系统 RT-Thread。

近日,国内领先的车规芯片企业芯驰科技与国内领先的车载RTOS(实时操作系统)企业睿赛德科技(RT-Thread)共同宣布:RT-Thread操作系统全面支持芯驰科技E3系列 MCU芯片。

近日,RT-Thread 和其高级会员合作伙伴极海半导体宣布:正式完成APM32F4系列MCU的RT-Thread 物联网操作系统适配及RT-Thread Studio IDE的支持。

国民技术将基于通用MCU和RT-Thread物联网操作系统构建完善的生态,满足不同行业、不同领域客户的开发需求,为产业持续带来具有差异化竞争力的软硬一体平台。

APM32F103xE系列MCU,基于32位ARM® Cortex®-M3内核,配置增强型外部储存控制器eMMC,并行LCD兼容8080/6800模式,功耗低,容量大,可移植性好。