RA测量芯片内部温度方法


瑞萨RA系列都有内置的温度传感器,可以通过下面几个简单步骤就能测量并获取工作温度信息和工作电压信息。
瑞萨RA系列都有内置的温度传感器,可以通过下面几个简单步骤就能测量并获取工作温度信息和工作电压信息。

CRC是数据通信领域中最常用的一种查错校验码,其特征是信息字段和校验字段的长度可以任意选定。循环冗余检查(CRC)是一种数据传输检错功能,对数据进行多项式计算,并将得到的结果附在帧的后面,接收设备也执行类似的算法,以保证数据传输的正确性和完整性。

本篇将为您介绍如何使用FSP配置CANFD Lite模块,请注意与RA6M5搭载的CANFD模块的配置略有区别,这里不详细讲述。

本文以RA4M2为例介绍如何设置ADC窗口比较功能。

瑞萨RA MCU(Renesas RA Microcontroller Unit)是一种高性能且多功能的微控制器单元,由瑞萨电子公司推出。它是基于ARM Cortex-M内核的先进微控制器系列,专为满足广泛的嵌入式应用需求而设计。
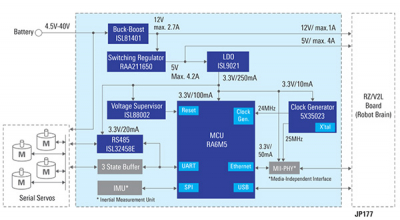
随着工业4.0和工业物联网的发展,机器人技术的需求变得越来越重要。同时,市场需要提供易于使用的架构,简化设计流程,并显著降低客户在各种应用中的设计风险。

新型RA4E2和RA6E2 MCU以紧凑的封装和丰富的外设选项带来高达200 MHz的性能

瑞萨Virtual EEPROM模块简称VEE模块,该VEE模块模拟基本的EEPROM功能,支持读和写操作两种常见的数据操作。
对于物联网的应用或者产品版本管理等场合,芯片的信息读取是用户非常关心的问题。本文介绍了瑞萨RA家族单片机读取Unique ID、Part Number和Mask Version信息的方法。

MCU设计中,很多时候客户需要在Flash指定地址存入指定数据,这里需要用到Flash的绝对定位,我们知道有些公司可以在keil使用char const buf[x] __attribute__ ((at(0x80000))) = {};实现,那么RA是否可以实现?