单片机的看门狗,你的产品中有用到吗?


单片机的看门狗(Watchdog Timer)是一种硬件电路,用于监控单片机的运行状态,确保系统的稳定性和可靠性。
单片机的看门狗(Watchdog Timer)是一种硬件电路,用于监控单片机的运行状态,确保系统的稳定性和可靠性。
看似乖巧的看门狗,也有比较调皮的一面,在烧录无法喂狗的特殊情况下仍会毫不留情的复位芯片,造成烧录失败,该如何避免这种情况的发生吗?

在单片机构成的微型计算机系统中,由于单片机的工作常常会受到来自外界电磁场的干扰,造成程序跑飞而陷入死循环,程序的正常运行被打断,从而导致由单片机控制的系统无法继续工作,整个系统陷入停滞状态,发生不可预料的后果
看似乖巧的看门狗,也有比较调皮的一面,在烧录无法喂狗的特殊情况下仍会毫不留情的复位芯片,造成烧录失败,该如何避免这种情况的发生吗?

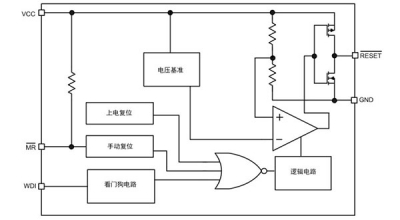
中科芯CKS32F4xx系列产品内部提供两个看门狗定时器单元,独立型看门狗IWDG(Independent Watchdog)和窗口型看门狗WWDG(Window Watchdog),本文主要介绍WWDG的应用,关于IWDG的详情,请参看我们的IWDG微课堂内容。

本文档介绍了 WDT 的工作原理、模式和时钟源,以及如何使用 MPLAB® Harmony v3 进行配置和生成代码。
我们都知道硬件看门狗的目的:是用来监测系统,防止系统死机,并在死机的情况下使其系统复位重启。

看门狗模块(WDOG)在MCU应用里可以说是非常基础的功能模块。对于一个产品级的应用程序,如果它没有使能主控内部的看门狗模块,一般都不能算是一个合格的软件设计。

早期的MCU没有看门狗,就容易引起有些产品死机了不能重启工作。为了避免这个问题,后期的MCU在内部集成了看门狗的功能。
不同的使用场景,对工业无线路由器、工业级无线DTU功能与性能的需求点就完全不一样,在工业级应用中,稳定可靠,是无线组网的第一需求。