单片机中写1清0和写0清0,有什么区别?

单片机文档的时候一般寄存器是rw类型,还有一些是r或者w。
单片机(Microcontroller, MCU)是一种集成了计算机功能的微型计算机,通常由一个微处理器(CPU)、存储器(ROM、RAM)、输入/输出接口、定时器/计数器等功能模块集成在同一芯片上。单片机是一种常用于嵌入式系统中的控制器,它被广泛应用于家电、汽车、工业自动化、医疗设备、消费电子、物联网(IoT)设备等多个领域。
单片机文档的时候一般寄存器是rw类型,还有一些是r或者w。

单片机编程者需要知道自己的程序需要花费多长时间、while周期是多少、delay延时是否真如函数功能描述那样精确延时。

内存分成5个区,它们分别是堆、栈、自由存储区、全局/静态存储区和常量存储区。

随着芯片集成度越来越高,芯片的体积也越来越小,贴片的小封装就不方便放在编程工具上,所以芯片直接焊在电路板上编程,在线编程功能随即流行起来。

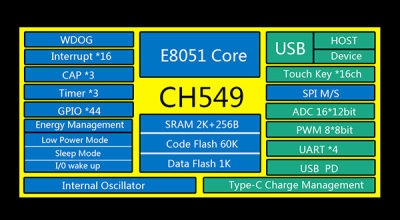
CH549提供丰富的接口资源,包括4组异步串口、8路PWM和16通道电容触摸按键,其它包括1路主从SPI,16路12位ADC,支持电压比较;内置3组定时器和3路信号捕捉;支持最多44个GPIO。

IO也叫GPIO,即通用输入输出端口,主要有一下几种模式:1、浮空输入模式;2、上拉输入;3、下拉输入;4、模拟输入;5、 推挽输出;6、 开漏输出;7、 复用推挽输出;8、 复用开漏输出。

总线: 指能为多个部件服务的信息传送线,在微机系统中各个部件通过总线相互通信。

CH549 芯片是一款兼容 MCS51 指令集的增强型 E8051 内核单片机,其 79%的指令是单字节单周期指令,平均指令速度比标准 MCS51 快 8~15 倍。

我们学习单片机的目的就是为了进行嵌入式系统的开发,学好单片机首先要有一个整体认识,下面将简要介绍一下单片机应用系统的开发流程。

本文我们将分析单片机到底是如何软硬件结合的,并通过一个基本的程序,分析单片机程序的编译,运行。