三相直流无刷电机由于其可靠性高、免维护的特点,逐渐取代有刷电机,成为汽车风机、水泵、油泵的首选动力来源。在设计电机控制器时,不能直接使用通用MCU的IO引脚驱动功率MOS,此时预驱芯片是最优选择。
引言
通用MCU或DSP的IO电压通常是5V\3.3V,IO的电流输出能力在20MA以下,不足以直接驱动功率MOSFET。所以使用通用MCU或DSP来设计电机驱动器时,通常需要搭配外部的MOSFET驱动器,我们称之为“预驱”。在设计汽车风机、水泵、油泵等电机驱动控制器时,使用车规MCU+车规预驱+车规N沟道功率MOSFET,可以适配不同功率、各种通信方式和各种驱动方式。
控制器中的功率MOS驱动
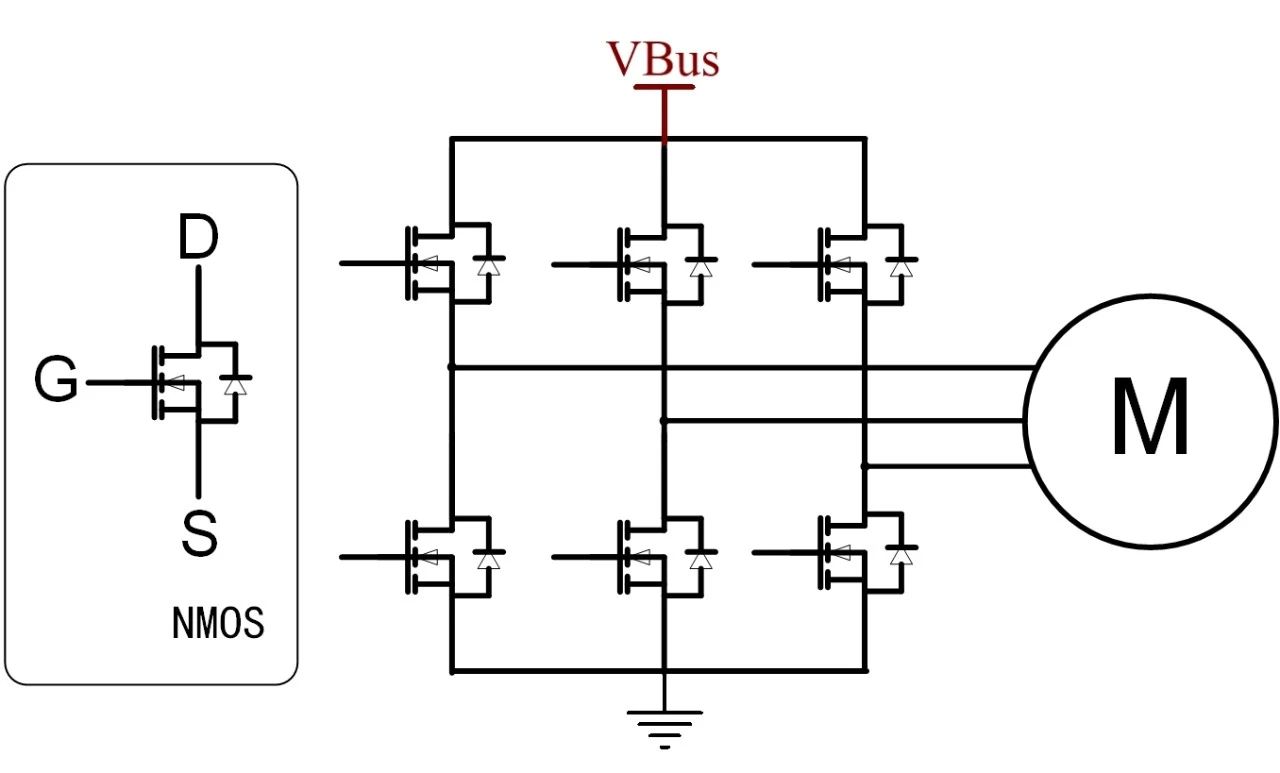
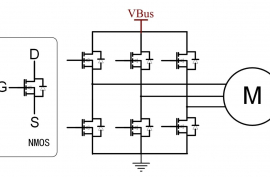
如图,三相直流无刷电机(包括BLDC和PMSM)功率级驱动电路使用6个N沟道功率MOS构成三相全桥,分为三个连接到电源正极(VBus)的高边MOS和三个连接到电源负极的低边MOS。控制器通过控制六个MOS的通断,完成换相,使电机按照预期转动。电机在运转过程中可能会遇到堵转而导致过流,因此MOS驱动电路需要具有保护功能,以防止烧坏控制器或电机。
对于单个NMOS来说,在开通时,需要提供瞬间大电流向MOS内的寄生电容充电,栅源电压(VGS)达到一定阈值后,MOS才能完全开通。在MOS开通后,还需要维持合适的栅源电压(VGS),才可以保持开通状态。
对于低边MOS,其源极(S)接到电源负极,栅源电压容易满足,驱动较简单。
对于高边MOS,其源极(S)接到电机相线,其电压是不确定的,如果需要开通,需要通过自举电路提供栅极电压,驱动较复杂。
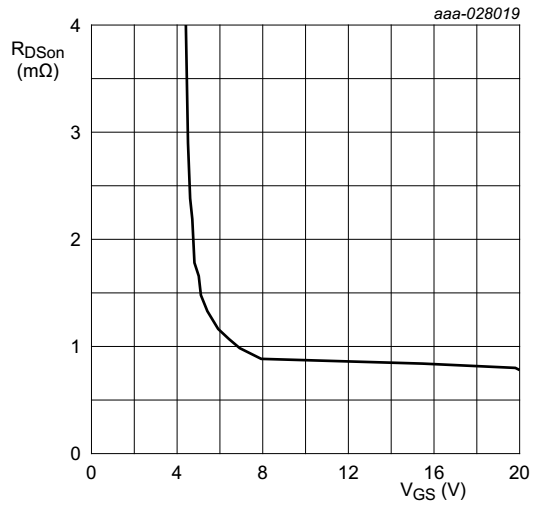
一般情况下,MOS的导通内阻都如图2所示,随着VGS的增大而降低,但VGS大于10V之后,下降曲线变得平缓。为了达到最小的导通电阻(RDSON),VGS的取值通常为10~15V。
车规预驱——MPQ6531
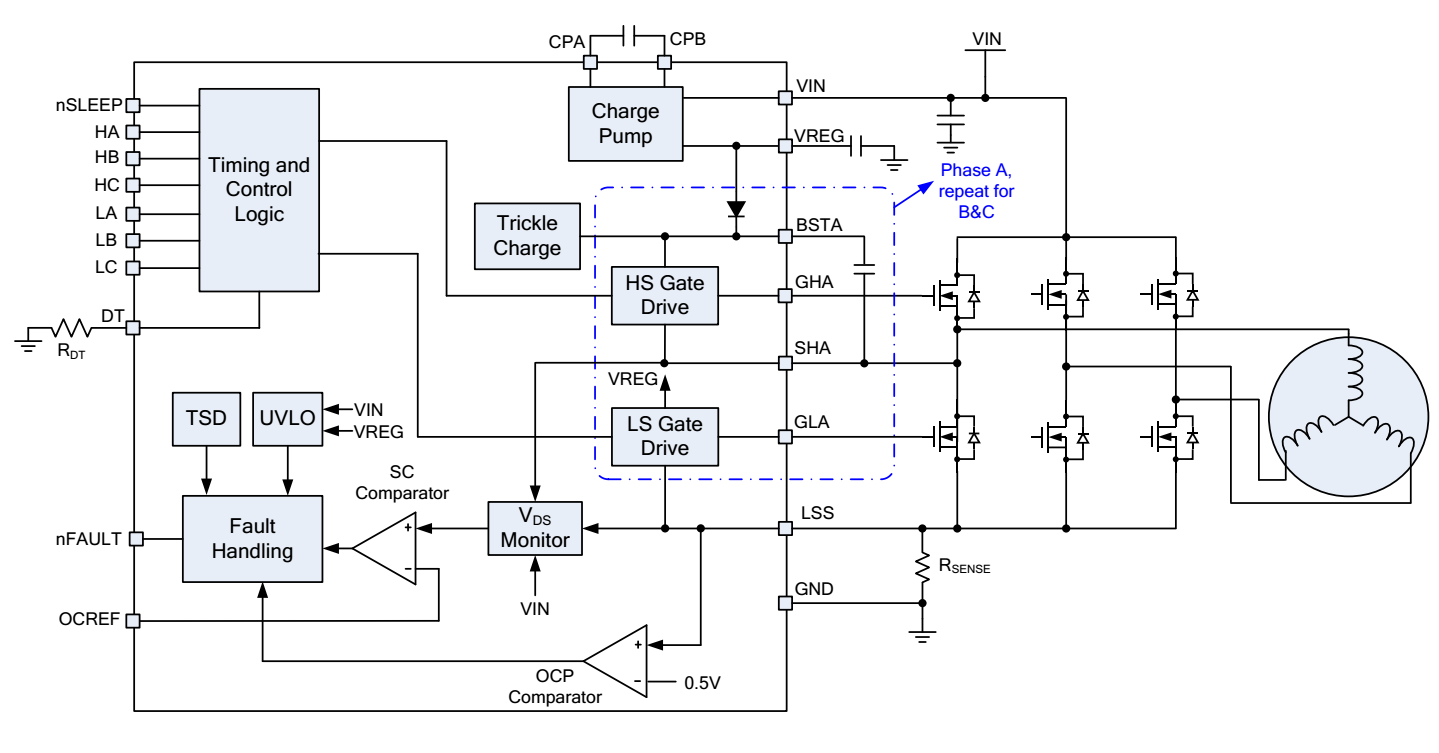
MPQ6531是MPS推出的一款专门用于汽车三相直流无刷电机控制器的预驱,符合AEC-Q100 Grade 1,输入电压为5-60V,可以满足12V/24V汽车电气系统下的需求。
1、集成三相预驱,体积仅4x5mm
MPQ6531是高度集成的预驱,其内部集成三个高低边驱动器,可以直接驱动由6个NMOS构成的三相全桥。采用QFN-28封装,体积为4x5mm,仅相当于SOP8封装的单个高低边驱动大小,非常适合于有体积要求的电机驱动控制器。
2、与MCU连接简单,占用引脚少
MPQ6531仅有6个PWM输入信号、1个故障输出信号与MCU连接,占用MCU引脚非常少。如有需要低功耗控制,MPQ6531还提供了一个nSLEEP引脚,拉低该引脚,芯片可以进入低功耗模式。在低功耗模式下,电流仅1.4μA.。其故障检测保护、死区时间等均通过硬件设置,无需复杂的软件控制。
3、11.5V栅极驱动电压
MPQ6531集成了稳压电荷泵以产生栅极驱动电源(VREG),其电压是11.5V,足以完美驱动常用功率NMOS。低边MOS源极(S)接到电源负极,所以VREG可以直接驱动。对于高边MOS,MPQ6531使用自举电容产生电源电压。在驱动高边MOS时,经过自举,其电压是VS+VREG。同时内部集成Trick Charger涓流充电电路,可保证在100%占空比情况下,保持足够的高端栅极驱动器电压。得益于芯片内部设计,即使电源电压下降至5V,VREG仍可保持在10-12V。
4、硬件死区插入功能
高边MOS和低边MOS同时打开会导致直通,烧坏MOS。所以必须保证打开与关闭存在时间上的延迟,该延时称为死区时间。MPQ6531可以通过DT引脚来设置死区时间,达到硬件保护的目的。
5、MOS过流、短路保护功能
为了保护MOS免受高电流损坏,MPQ6531中采用了VDS感应电路。MPQ6531可以监控每个MOS上的压降。MOS的压降与MOS的RDSON和流经它的IDS电流成正比。过流检测阈值可以通过OCREF引脚设置,如果MOS压降超过提供给OCREF端子的电压,则表明存在MOS过流故障。
6、母线过流保护功能
MPQ6531内置一个比较器,可以实现母线过流保护功能。母线电流流过采样电阻RSense会产生压降,该电压与内部的0.5V电压做比较,如果超过0.5V则表明存在母线电流故障。
7、故障保护功能
除了MOS过流保护和母线过流保护功能,MPQ6531还具有低压保护、过温保护功能。当检测到故障时,MPQ6531会禁用所有栅极驱动输出,使得所有MOS都处于关闭状态,达到保护MOS的效果。
结语
MPQ6531是一款车规级的高度集成三相预驱,专为三相直流无刷电机控制设计,适用于FOC驱动、方波驱动,可以有效减少BOM成本和PCB尺寸。ZLG可提供原理图和PCB设计参考,协助厂商进行电机控制器快速开发。
来源:ZLG立功科技
免责声明:本文为转载文章,转载此文目的在于传递更多信息,版权归原作者所有。本文所用视频、图片、文字如涉及作品版权问题,请联系小编进行处理(联系邮箱:cathy@eetrend.com)。