开发单片机的常见IDE有哪些?
cathy 在 提交

cathy 在 提交
为了防止大家的程序不被剽窃,本文给大家分享单片机加密的方法。
常见加密方法
程序写保护
这种方法是最常见,也是最简单的一种。现在的MUC基本都有写保护功能,但是这种容易被人破解。
烧断数据总线
这个方法听起来不错,但有损坏的风险,同样也能破解。
软件加密
是一些防止别人读懂程序的方法,单一的这种方法不能防止别人全盘复制,须配合其他的加密算法。
添加外部硬件电路的加密方法
这个方法效果看起来比较好,但会增加成本。
芯片打磨改型
这个方法改了型号能误导,但同时也增加成本,解密者一般也能分析出来。
通过通过联网加序列号加密
通过连接网络,在你的MCU中生成一个唯一的随机长序列号,并加入复杂的特种算法,或加入你们重新编码的企业信息在里面,每个芯片内不同,复制者只能复制到一个序列号。
通过MCU唯一的标识加密
以前很多MCU没有唯一标识码,现在的很多MCU都具有唯一标识码了。
这个方法比较好,简单省事,能很好的防止复制。
读保护 + 唯一ID加密
使用读保护 + 唯一ID的加密是最常用的一种方法,也是推荐大家使用的一种方法。
唯一ID
现在正规的芯片,每颗出厂的时候都带了一个唯一标识码,这个号码是唯一不重复的,比如STM32的就使用96位作为唯一ID。
和我们每个人的身份证号码一样,现在刚出生的婴儿,上户的时候就给他一个身份证号,那么每个芯片一生产出来,也就具备了这个身份证号。
加密原理
读保护就不用说了,增加被破解难度。
使用唯一ID加密的方法很多,这里说一种简单的方法:出厂时程序读取唯一ID并保存在一个位置,以后程序执行之前,要读取并匹配这个唯一ID,一致才执行程序。
当然,这种方法是最基础的原理,但也存在被破解的风险。所以,存储的数据,以及读取验证这两个地方需要进一步添加一些算法。
这样操作之后,即使别人读取了你的程序,也是无法正常执行。
来源: 电子工程世界-论坛
免责声明:本文为转载文章,转载此文目的在于传递更多信息,版权归原作者所有。本文所用视频、图片、文字如涉及作品版权问题,请联系小编进行处理(联系邮箱:cathy@eetrend.com)。
理论上,只要是用晶振作为时基的单片机时间钟,在常温下做到日差1秒之内,甚至更精准是应该极易达成的。
只是许多人并不知道如何达成这个目标的方案。

而且市面很多带单片机的产品中,时间都做不准,这绝对是设计问题。例如:笔者车子上的时钟日差有10秒多。
一般大多数人所设计的定时器时常,是根据晶振标出的数据(如12M)计算而成的,固定不变,设计呆板。但普通晶振的实际振荡频率是不可能与标出的数据完全相同的,例如:12.00043M,11.99985……,这个误差必然积累,所以时钟就不准了。另外绝大多数设计也没有考虑微调方案,对于日差几秒无法控制。
日差1秒要求的精准是:1秒/(24小时*60分*60秒),对应12M晶振;当频率是12.000014M或11.999986M,日差就有1.2秒。可见用普通晶振做的时间钟,如果不采取修正措施,会因精度不够,时钟日差10多秒是很普遍的。
在笔者设计的有单片机时间产品中,随机取10个,同时上电,3天后再看时钟,它们之间的最大时间误差,一般都不会超出1秒(普通晶振,不联网)。许多产品月差在1秒之内。
1、实现方法:
1)将时间的定时中断时常数做成可修正的,且加入微调常数,定时时常数与微调时常数在FLASH中取得。微调时常数用于修正时常数的小数点之后的部分。
2)程序可以对某端口输入的秒脉冲再进行计算,并据之修正定时器的时常数,以及微调常数,并存入FLASH中。达成利用外部精准脉冲源对时钟进行校准的目的,说白了,就是用外校消除普通晶振的个体差异。同时程序也可以输出自己的秒脉冲,这样就可以达成产品之间的互校。
3)选择一个产品,对其时钟进行精确校准(这需要外部精准的时钟源。如果手中没有,可以多花点时间,用手机、电视、广播上的报时进行校准),这样就可以将它做成一个自己的【标准秒脉冲时钟源】。
4)产品出货前,用自己的【标准秒脉冲时钟源】校一下(将输出的标准秒脉冲送入其它产品的校准端口,让其它产品自动完成定时器时常数及微调常数的修正。)
如此处理,时间钟的精度就取决于晶振的稳定度,而不是精度。而晶振的稳定度普遍可以达到PPM级,当环境温度变化不大时,极易保证<11.57PPM,这就达成了日差小于1秒的目的。
2、产品相关时间基准的程序:
1)将端口输入的秒脉冲与本体的晶振频率进行比对,计算出定时器的时常数与微调时常数(只做一次即可,计算结果保存到FLASH了,其最初值是按晶振的标称值计算确定的)。
2)时间微调补偿。
3)秒脉冲输出(用于互校,可以放弃不写)。
要点:定时器的时常数不是程序直接赋值,而是从FLASH中调取的。
来源:嵌入式ARM
免责声明:本文为转载文章,转载此文目的在于传递更多信息,版权归原作者所有。本文所用视频、图片、文字如涉及作品版权问题,请联系小编进行处理(联系邮箱:cathy@eetrend.com)。

一、总线概述
计算机系统是以微处理器为核心的,各器件要与微处理器相连,且必须协调工作,所以在微处理机中引入了总线的概念,各器件共同享用总线,任何时候只能有一个器件发送数据(可以有多个器件同时接收数据)。
计算机的总线分为控制总线、地址总线和数据总线等三种。而数据总线用于传送数据,控制总线用于传送控制信号,地址总线则用于选择存储单元或外设。
二、单片机的三总线结构
51系列单片机具有完善的总线接口时序,可以扩展控制对象,其直接寻址能力达到64k( 2的16次方) 。在总线模式下,不同的对象共享总线,独立编址、分时复用总线,CPU通过地址选择访问的对象,完成与各对象之间的信息传递。
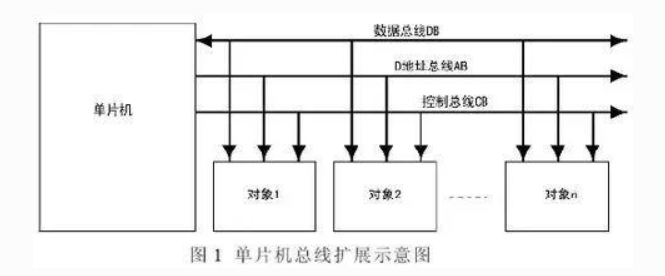
单片机三总线扩展示意如图1所示。
1、数据总线
51单片机的数据总线为P0口,P0口为双向数据通道,CPU从P0口送出和读回数据。
2、地址总线
51系列单片机的地址总线为16位。
为了节约芯片引脚,采用P0口复用方式,除了作为数据总线外,在ALE信号时序匹配下,通过外置的数据锁存器,在总线访问前半周期从P0口送出低8位地址,后半周期从P0口送出8位数据。
高8位地址则通过P2口送出。
3、控制总线
51系列单片机的控制总线包括读控制信号P3.7和写控制信号P3.6等,二者分别作为总线模式下数据读和数据写的使能信号。
三、单片机总线时序分析
51 单片机总线时序如图2 所示。
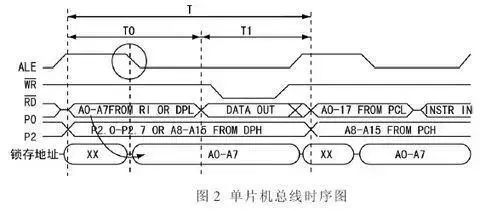
从图2中可以看出,完成一次总线(读写)操作周期为T,P0口分时复用,在T0期间,P0口送出低8位地址,在ALE的下降沿完成数据锁存,送出低8位地址信号。在T1期间,P0口作为数据总线使用,送出或读入数据,数据的读写操作在读、写控制信号的低电平期间完成。
需要注意的是,在控制信号(读、写信号)有效期间,P2口送出高8位地址,配合数据锁存器输出的低8 位地址,实现16位地址总线,即64kB范围的内的寻址。
由于CPU不可能同时执行读和写操作,所以读、写信号不可能同时有效。
四、常见单片机编址电路
1、简单地址扩展
51单片机的P2口可以直接作为高8位地址总线使用,在一些简单系统电路中,常使用P2口直接编址驱动。
下面以使用数据缓冲器74LS273驱动数码显示为例,分析P2口编址驱动的静态数码显示电路的设计。
一位LED数码显示单元电路如图3所示。
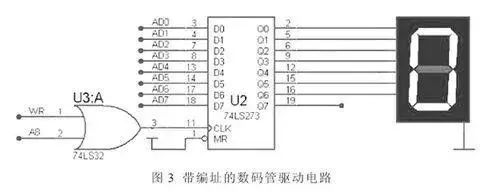
WR与A8(P2.0)相或提供74LS273的时钟信号,当执行“MOVX @DPTR,A”指令时,地址信息由DPTR寄存器确定,会出现有效的写信号WR,只有当地址A8为满足“0”时,写信号才可以作为74LS273的时钟信号输入,完成数据锁存。
P2口为A8~A15的8位地址线,很容易扩展到8只LED数码管,WR信号分别与A8~A15按或关系连接,每位地址线均为低电平有效,即可实现8个有效地址。
该方案电路简单,但有效地址数太少,不适用于复杂系统设计。
2、低8位地址锁存
通常的设计电路是使用8D锁存器74LS373实现地址锁存,74HC573与之逻辑功能相同,只是引脚布局不一样,使用74HC573布线更容易。
74LS373真值表如图4所示。
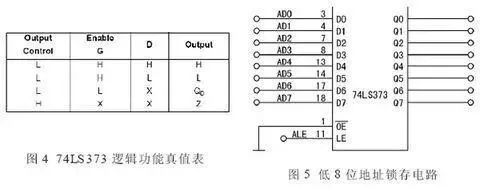
在输出允许OE为L、控制使能LE为H时,输出为跟随状态;OE为L、LE为L时,输出为保持状态。
地址锁存电路如图5所示。OE接地,LE接单片机的ALE脚将产生满足时序的低8位地址信号。
执行以下三条指令会得到如图6所示的时序图。
MOV DPTR,# 0FF55H; 低8 位地址为55H
MOV A,# 0AAH; 待发送数据0AAH→A( 55H 取反)
MOVX,@DPTR,A; A 中的0AAH送地址为0FF55H 的对象中会。
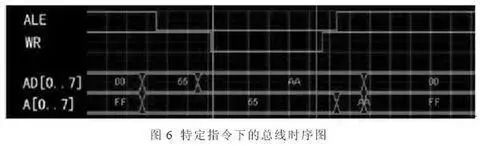
从图6中可以看出,P0口先送55H,在ALE下降沿实现地址锁存,随后送出数据0AAH,在WR有效( 低电平)期间锁存器输出低8位地址55H,P0口送出数据0AAH。
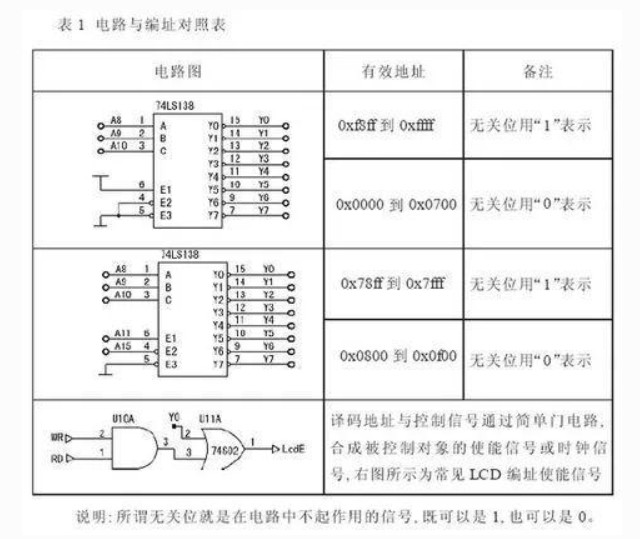
3、带译码器的复杂地址接口电路
理论上高8位地址线可以产生256个有效地址,如何实现地址“扩展”呢?地址扩展准确描述是地址译码,例如3根地址线可以译码成8 个地址,4根译码成16个有效地址。这里选择3-8译码器实现地址译码,电路图以及对应的编址如表1 所示。
五、单片机总线编址电路实例
总线扩展接口的单片机系统,包括外部32k RAM扩展、LCD1602接口、输入输出口。
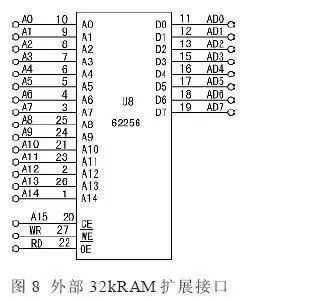
D0~D7接数据总线P0口,地址线A0~A14接单片机地址总线低15位,单片机地址线A15接RAM片选信号,低电平有效,这样RAM地址分配从0000H到7FFFH,与74138译码地址不冲突。
LCD1602接口电路如图9所示。

RS、RW分别接A12、A13,使能信号编址为Y7,这样LCD的四个驱动地址(数据读写和命令读写)为0CFFFH到0FFFFH(无关位为1)或者8700H到0B700H(无关位为0)。
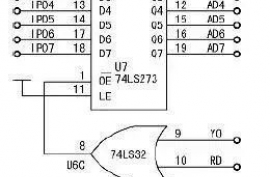
有些时候单片机引脚不够用,还要进行扩展,输入口扩展电路如图10 所示。
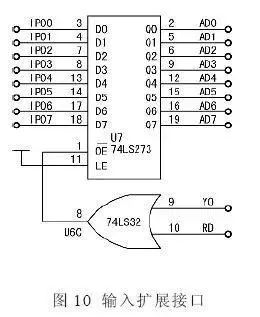
利用74HC573(74LS373)的高阻态功能,将其输出Q0~Q7接P0口,在满足总线地址读操作中,可以把输入InPORT的数据读入单片机的累加器,地址为0F8FFH或8000H。
输出口扩展电路如图11所示。
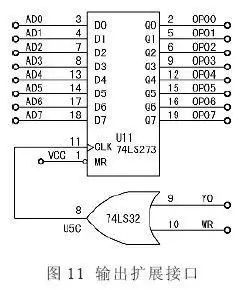
利用74LS273数据锁存功能,在满足总线地址写操作中,可以把单片机累加器里的数据写入273 锁存输出,地址为0F8FFH或8000H。由于所用控制总线不同,可以和输入共用地址。
六、结束语
总线扩展是设计单片机控制电路必须掌握的技术,大量的特殊功能IC都支持总线接口,如ADC0809,TLC7528,DDS器件AD9851等。
总线接口的要点就是在严格的控制时序下,总线被分时复用,以实现复杂系统设计。
来源:CSDN博客
免责声明:本文为转载文章,转载此文目的在于传递更多信息,版权归原作者所有。本文所用视频、图片、文字如涉及作品版权问题,请联系小编进行处理(联系邮箱:cathy@eetrend.com)。









摘要:不知道大家有没有这样一种感觉,就是感觉自己玩单片机还可以,各个功能模块也都会驱动,但是如果让你完整的写一套代码,却无逻辑与框架可言,上来就是开始写!东抄抄写抄抄。说明编程还处于比较低的水平,那么如何才能提高自己的编程水平呢?学会一种好的编程框架或者一种编程思想,可能会受用终生!比如模块化编程,框架式编程,状态机编程等等,都是一种好的框架。
今天说的就是状态机编程,由于篇幅较长,大家慢慢欣赏。那么状态机是一个这样的东东?状态机(state machine)有5个要素,分别是状态(state)、迁移(transition)、事件(event)、动作(action)、条件(guard)。
1、什么是状态机?
状态机是一个这样的东东:状态机(state machine)有 5 个要素,分别是状态(state)、迁移(transition)、事件(event)、动作(action)、条件(guard)。
状态:一个系统在某一时刻所存在的稳定的工作情况,系统在整个工作周期中可能有多个状态。例如一部电动机共有正转、反转、停转这 3 种状态。
一个状态机需要在状态集合中选取一个状态作为初始状态。
迁移:系统从一个状态转移到另一个状态的过程称作迁移,迁移不是自动发生的,需要外界对系统施加影响。停转的电动机自己不会转起来,让它转起来必须上电。
事件:某一时刻发生的对系统有意义的事情,状态机之所以发生状态迁移,就是因为出现了事件。对电动机来讲,加正电压、加负电压、断电就是事件。
动作:在状态机的迁移过程中,状态机会做出一些其它的行为,这些行为就是动作,动作是状态机对事件的响应。给停转的电动机加正电压,电动机由停转状态迁移到正转状态,同时会启动电机,这个启动过程可以看做是动作,也就是对上电事件的响应。
条件:状态机对事件并不是有求必应的,有了事件,状态机还要满足一定的条件才能发生状态迁移。还是以停转状态的电动机为例,虽然合闸上电了,但是如果供电线路有问题的话,电动机还是不能转起来。
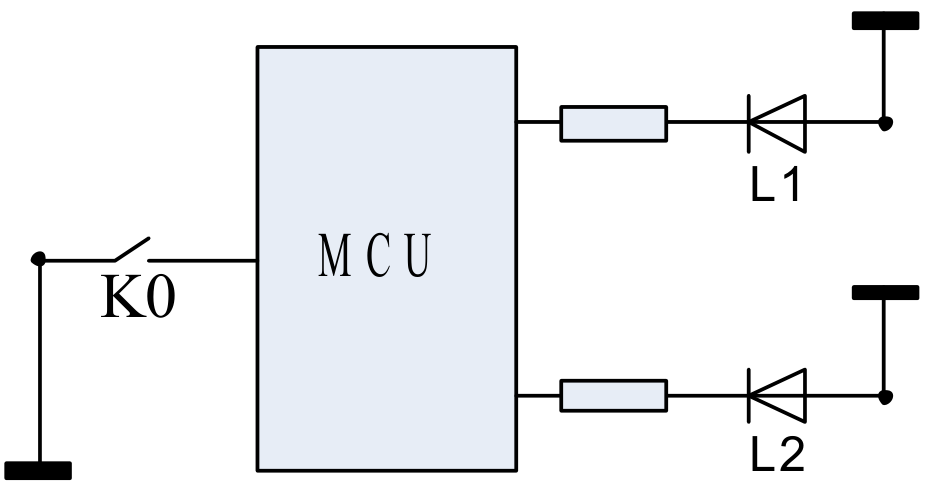
只谈概念太空洞了,上一个小例子:一单片机、一按键、俩 LED 灯(记为L1和L2)、一人, 足矣!
规则描述:
1、L1L2状态转换顺序OFF/OFF--->ON/OFF--->ON/ON--->OFF/ON--->OFF/OFF
2、通过按键控制L1L2的状态,每次状态转换需连续按键5次
3、L1L2的初始状态OFF/OFF
下面这段程序是根据功能要求写成的代码。
程序清单List1:
void main(void)
{
sys_init();
led_off(LED1);
led_off(LED2);
g_stFSM.u8LedStat = LS_OFFOFF;
g_stFSM.u8KeyCnt = 0;
while(1)
{
if(test_key()==TRUE)
{
fsm_active();
}
else
{
; /*idle code*/
}
}
}
void fsm_active(void)
{
if(g_stFSM.u8KeyCnt > 3) /*击键是否满 5 次*/
{
switch(g_stFSM.u8LedStat)
{
case LS_OFFOFF:
led_on(LED1); /*输出动作*/
g_stFSM.u8KeyCnt = 0;
g_stFSM.u8LedStat = LS_ONOFF; /*状态迁移*/
break;
case LS_ONOFF:
led_on(LED2); /*输出动作*/
g_stFSM.u8KeyCnt = 0;
g_stFSM.u8LedStat = LS_ONON; /*状态迁移*/
break;
case LS_ONON:
led_off(LED1); /*输出动作*/
g_stFSM.u8KeyCnt = 0;
g_stFSM.u8LedStat = LS_OFFON; /*状态迁移*/
break;
case LS_OFFON:
led_off(LED2); /*输出动作*/
g_stFSM.u8KeyCnt = 0;
g_stFSM.u8LedStat = LS_OFFOFF; /*状态迁移*/
break;
default: /*非法状态*/
led_off(LED1);
led_off(LED2);
g_stFSM.u8KeyCnt = 0;
g_stFSM.u8LedStat = LS_OFFOFF; /*恢复初始状态*/
break;
}
}
else
{
g_stFSM.u8KeyCnt++; /*状态不迁移,仅记录击键次数*/
}
}实际上在状态机编程中,正确的顺序应该是先有状态转换图,后有程序,程序应该是根据设计好的状态图写出来的。不过考虑到有些童鞋会觉得代码要比转换图来得亲切,我就先把程序放在前头了。
这张状态转换图是用UML(统一建模语言)的语法元素画出来的,语法不是很标准,但拿来解释问题足够了。
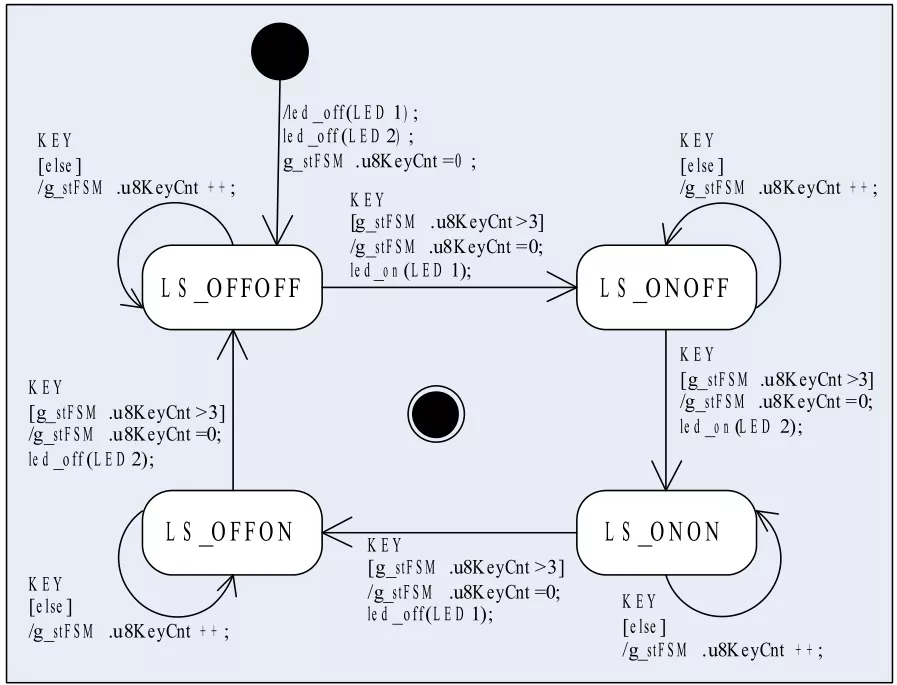
圆角矩形代表状态机的各个状态,里面标注着状态的名称。
带箭头的直线或弧线代表状态迁移,起于初态,止于次态。
图中的文字内容是对迁移的说明,格式是:事件[条件]/动作列表(后两项可选)。
“事件[条件]/动作列表”要说明的意思是:如果在某个状态下发生了“事件”,并且状态机
满足“[条件]”,那么就要执行此次状态转移,同时要产生一系列“动作”,以响应事件。在这个例子里,我用“KEY”表示击键事件。
图中有一个黑色实心圆点,表示状态机在工作之前所处的一种不可知的状态,在运行之前状态机必须强制地由这个状态迁移到初始状态,这个迁移可以有动作列表(如图1所示),但不需要事件触发。
图中还有一个包含黑色实心圆点的圆圈,表示状态机生命周期的结束,这个例子中的状态机生生不息,所以没有状态指向该圆圈。
关于这个状态转换图就不多说了,相信大家结合着上面的代码能很容易看明白。现在我们再聊一聊程序清单List1。
先看一下fsm_active()这个函数,g_stFSM.u8KeyCnt = 0;这个语句在switch—case里共出现了 5 次,前 4 次是作为各个状态迁移的动作出现的。从代码简化提高效率的角度来看,我们完全可以把这 5 次合并为 1 次放在 switch—case 语句之前,两者的效果是完全一样的,代码里之所以这样啰嗦,是为了清晰地表明每次状态迁移中所有的动作细节,这种方式和图2的状态转换图所要表达的意图是完全一致的。
再看一下g_stFSM这个状态机结构体变量,它有两个成员:u8LedStat和 u8KeyCnt。用这个结构体来做状态机好像有点儿啰嗦,我们能不能只用一个像 u8LedStat 这样的整型变量来做状态机呢?
当然可以!我们把图 2中的这 4 个状态各自拆分成 5 个小状态,这样用 20 个状态同样能实现这个状态机,而且只需要一个 unsigned char 型的变量就足够了,每次击键都会引发状态迁移, 每迁移 5 次就能改变一次 LED 灯的状态,从外面看两种方法的效果完全一样。
假设我把功能要求改一下,把连续击键5次改变L1L2的状态改为连续击键100次才能改变L1L2的状态。这样的话第二种方法需要4X100=400个状态!而且函数fsm_active()中的switch—case语句里要有400个case,这样的程序还有法儿写么?!
同样的功能改动,如果用g_stFSM这个结构体来实现状态机的话,函数fsm_active()只需要将if(g_stFSM.u8KeyCnt>3)改为if(g_stFSM.u8KeyCnt > 98)就可以了!
g_stFSM结构体的两个成员中,u8LedStat可以看作是质变因子,相当于主变量;u8KeyCnt可以看作是量变因子,相当于辅助变量。量变因子的逐步积累会引发质变因子的变化。
像g_stFSM这样的状态机被称作Extended State Machine,我不知道业内正规的中文术语怎么讲,只好把英文词组搬过来了。
2、状态机编程的优点
说了这么多,大家大概明白状态机到底是个什么东西了,也知道状态机化的程序大体怎么写了,那么单片机的程序用状态机的方法来写有什么好处呢?
(1)提高CPU使用效率
话说我只要见到满篇都是delay_ms()的程序就会蛋疼,动辄十几个ms几十个ms的软件延时是对CPU资源的巨大浪费,宝贵的CPU机时都浪费在了NOP指令上。那种为了等待一个管脚电平跳变或者一个串口数据而岿然不动的程序也让我非常纠结,如果事件一直不发生,你要等到世界末日么?
把程序状态机化,这种情况就会明显改观,程序只需要用全局变量记录下工作状态,就可以转头去干别的工作了,当然忙完那些活儿之后要再看看工作状态有没有变化。只要目标事件(定时未到、电平没跳变、串口数据没收完)还没发生,工作状态就不会改变,程序就一直重复着“查询—干别的—查询—干别的”这样的循环,这样CPU就闲不下来了。在程序清单 List3 中,if{}else{}语句里else下的内容(代码中没有添加,只是加了一条/*idle code*/的注释示意)就是上文所说的“别的工作” 。
这种处理方法的实质就是在程序等待事件的过程中间隔性地插入一些有意义的工作,好让CPU不是一直无谓地等待。
(2) 逻辑完备性
我觉得逻辑完备性是状态机编程最大的优点。
不知道大家有没有用C语言写过计算器的小程序,我很早以前写过,写出来一测试,那个惨不忍睹啊!当我规规矩矩的输入算式的时候,程序可以得到正确的计算结果,但要是故意输入数字和运算符号的随意组合,程序总是得出莫名其妙的结果。
后来我试着思维模拟一下程序的工作过程,正确的算式思路清晰,流程顺畅,可要碰上了不规矩的式子,走着走着我就晕菜了,那么多的标志位,那么多的变量,变来变去,最后直接分析不下去了。
很久之后我认识了状态机,才恍然明白,当时的程序是有逻辑漏洞的。如果把这个计算器程序当做是一个反应式系统,那么一个数字或者运算符就可以看做一个事件,一个算式就是一组事件组合。对于一个逻辑完备的反应式系统,不管什么样的事件组合,系统都能正确处理事件,而且系统自身的工作状态也一直处在可知可控的状态中。反过来,如果一个系统的逻辑功能不完备,在某些特定事件组合的驱动下,系统就会进入一个不可知不可控的状态,与设计者的意图相悖。
状态机就能解决逻辑完备性的问题。
状态机是一种以系统状态为中心,以事件为变量的设计方法,它专注于各个状态的特点以及状态之间相互转换的关系。状态的转换恰恰是事件引起的,那么在研究某个具体状态的时候,我们自然而然地会考虑任何一个事件对这个状态有什么样的影响。这样,每一个状态中发生的每一个事件都会在我们的考虑之中,也就不会留下逻辑漏洞。
这样说也许大家会觉得太空洞,实践出真知,某天如果你真的要设计一个逻辑复杂的程序,
我保证你会说:哇!状态机真的很好用哎!
(3)程序结构清晰
用状态机写出来的程序的结构是非常清晰的。

程序员最痛苦的事儿莫过于读别人写的代码。如果代码不是很规范,而且手里还没有流程图,读代码会让人晕了又晕,只有顺着程序一遍又一遍的看,很多遍之后才能隐约地明白程序大体的工作过程。有流程图会好一点,但是如果程序比较大,流程图也不会画得多详细,很多细节上的过程还是要从代码中理解。
相比之下,用状态机写的程序要好很多,拿一张标准的UML状态转换图,再配上一些简明的文字说明,程序中的各个要素一览无余。程序中有哪些状态,会发生哪些事件,状态机如何响应,响应之后跳转到哪个状态,这些都十分明朗,甚至许多动作细节都能从状态转换图中找到。可以毫不夸张的说,有了UML状态转换图,程序流程图写都不用写。
来源:嵌入式Linux
免责声明:本文为转载文章,转载此文目的在于传递更多信息,版权归原作者所有。本文所用视频、图片、文字如涉及作品版权问题,请联系小编进行处理(联系邮箱:cathy@eetrend.com)。



01、确定任务
开发单片机最小系统。
02、任务分析
该系统具有的功能:
(1)具有2位LED数码管显示功能。
(2)具有八路发光二极管显示各种流水灯。
(3)可以完成各种奏乐,报警等发声音类实验。
(4)具有复位功能。
03、功能分析
(1)两位LED数码管显示功能,我们可以利用单片机的P0口接两个数码管来现这个功能;
(2)八路发光二极管显示可以利用P1口接八个发光二极管实现这个功能;
(3)各种奏乐、报警等发声功能可以采用P2.0这个引脚接一蜂鸣器来实现。
(4)利用单片机的第9脚可以设计成复位系统,我们采用按键复位;利用单片机的18、19脚可以设计成时钟电路,我们利用单片机的内部振荡方式设计的。
04、设计框图
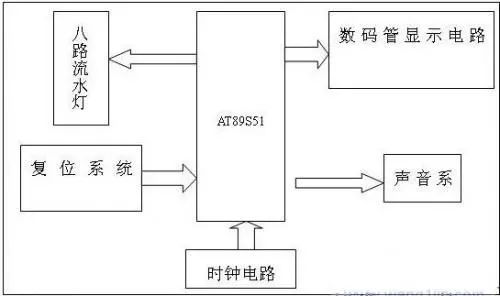
05、硬件电路设计
根据本系统的功能,和单片机的工作条件,我们设计出下面的电路图。
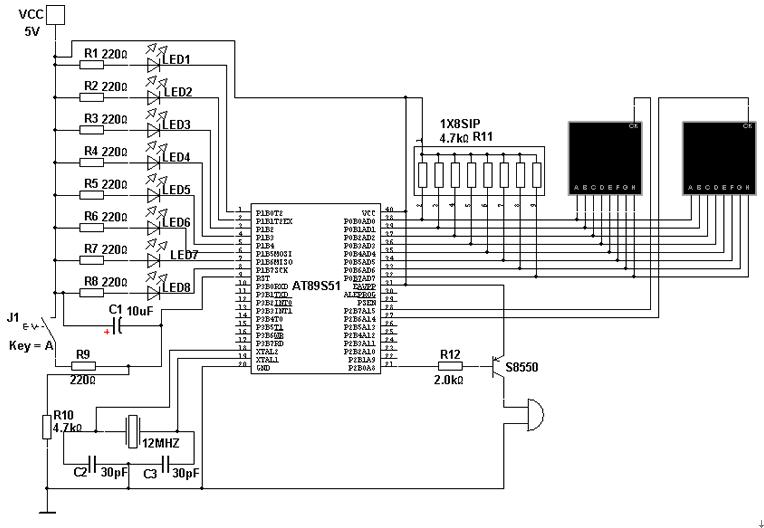
06、元件清单的确定
数码管:共阴极2只(分立)
电解电容:10UF的一只
30PF的电容2只
220欧的电阻9只
4.7K的电阻一只
1.2K的电阻一只
4.7K的排阻一只,
12MHz的晶振一只
有源5V蜂名器一只
AT89S51单片机一片
常开按钮开关1只
紧锁座一只(方便芯取下来的,绿色的)
发光二极管(5MM红色)8只
万能板电路版15*17CM
S8550三极管一只
4.5V电池盒一只,导线若干。
07、硬件电路的焊接
按照原理图把上面的元件焊接好。
08、相关程序编写
针对上面的电路原理图,设计出本系统的详细功能:
(1)第一个发光二极管点亮,同时数码管显示“1”。
(2)第二个发光二极管点亮,同时数码管显示“2”。
(3)依次类推到第八个发光二极管点亮,同时数码管显示“8”。
以上出现的是流水灯的效果
(4)所有的发光二极管灭了,同时数码管现实“0”。
(5)数码管显示“1”。
(6)数码管显示“2、……”直到“9、A、B、C、D、E、F、Y”。
(7)蜂鸣器发出九声报警声后重复上面所有步骤。
(8)程序如下:
ORG 0000H;伪指令,定义下面的程序代码(机器代码)从地址为0000H的单元存放。
LJMP START;跳转到标号为START的地方去执行。
ORG 0030H;伪指令,定义下面的程序代码(机器代码)从地址为0030H的单元存放。
START:MOV P1,#0FEH ;点亮第一个发光二极管。
CLR P2.7 ;送低电平到第一个数码管,开启数码管。
CLR P2.6 ;送低电平到第二个数码管,开启数码管。
MOV P0,#06H;让数码管显示“1” 。
LCALL DELAY;调用延时子程序,起到延时的目的。
MOV P1,#0FDH;点亮第二个发光二极管。
MOV P0,#5bH;让数码管显示“2” 。
LCALL DELAY;调用延时子程序,起到延时的目的。
MOV P1,#0FBH;点亮第三个发光二极管。
MOV P0,#4fH;让数码管显示“3” 。
LCALL DELAY;调用延时子程序,起到延时的目的。
MOV P1,#0F7H;点亮第四个发光二极管。
MOV P0,#66H;让数码管显示“4” 。
LCALL DELAY;调用延时子程序,起到延时的目的。
MOV P1,#0EFH;点亮第五个发光二极管。
MOV P0,#6dH;让数码管显示“5” 。
LCALL DELAY;调用延时子程序,起到延时的目的。
MOV P1,#0DFH;点亮第六个发光二极管。
MOV P0,#7dH;让数码管显示“6” 。
LCALL DELAY;调用延时子程序,起到延时的目的。
MOV P1,#0BFH;点亮第七个发光二极管。
MOV P0,#07H;让数码管显示“7” 。
LCALL DELAY;调用延时子程序,起到延时的目的。
MOV P1,#7FH;点亮第八个发光二极管。
MOV P0,#7fH;让数码管显示“8” 。
LCALL DELAY;调用延时子程序,起到延时的目的。
MOV P1,#00H;灭了所有的发光二极管。
MOV P0,#3FH;让数码管显示“0” 。
LCALL DELAY;调用延时子程序,起到延时的目的。
MOV P0,#06H;让数码管显示“1” 。
LCALL DELAY;调用延时子程序,起到延时的目的。
MOV P0,#5bH;让数码管显示“2” 。
LCALL DELAY;调用延时子程序,起到延时的目的。
MOV P0,#4fH;让数码管显示“3” 。
LCALL DELAY;调用延时子程序,起到延时的目的。
MOV P0,#66H;让数码管显示“4” 。
LCALL DELAY;调用延时子程序,起到延时的目的。
MOV P0,#6dH;让数码管显示“5” 。
LCALL DELAY;调用延时子程序,起到延时的目的。
MOV P0,#7dH;让数码管显示“6” 。
LCALL DELAY;调用延时子程序,起到延时的目的。
MOV P0,#07H;让数码管显示“7” 。
LCALL DELAY;调用延时子程序,起到延时的目的。
MOV P0,#7fH;让数码管显示“8” 。
LCALL DELAY;调用延时子程序,起到延时的目的。
MOV P0,#6fH;让数码管显示“9” 。
LCALL DELAY;调用延时子程序,起到延时的目的。
MOV R4,#9;送蜂鸣器的报警次数。
LOOP:SETB P2.0;不发声
LCALL DELAY;调用延时子程序,起到延时的目的。
CLR P2.0;发声。
LCALL DELAY;调用延时子程序,起到延时的目的。
DJNZ R4,LOOP;发声九次后向下执行。
SETB P2.0;关闭发声
LJMP START;跳转到标号为START处执行,循环本程序。
DELAY:MOV R7,#200;这是延时子程序。
D1:MOV R6,#200
D2:MOV R5,#200
D3:DJNZ R5,D3
DJNZ R6,D2
DJNZ R7,D1
RET;延时子程序返回指令。
END;结束伪指令。
09、调试和编译
利用KEIL C51 软件对上面的程序进行调试和编译,产生*.HEX文件,以便用编程器写入单片机芯片中。
10、编程器的使用
用编程器把电脑里生成的*.HEX文件写到芯片中。
11、产品调试
通上4.5V(三节电池)的电源,可以调试本系统,如果没有错误就可以正常工作了。
来源:嵌入式ARM
免责声明:本文为转载文章,转载此文目的在于传递更多信息,版权归原作者所有。本文所用视频、图片、文字如涉及作品版权问题,请联系小编进行处理(联系邮箱:cathy@eetrend.com)。


XTAL1和XTAL2指的是8051系单片机上常见的用于接“晶振”(晶体谐振器-Crystal Resonator”)的两个引脚。从原理上来说,这两个引脚和MCU内部一个反相器相连接。这个反相器与外部的“晶振”组成一个构成一个皮尔斯振荡器(Pierce oscillator)。因为这个振荡器集成在器件内部的组件实在是不能更简单啦,就一个反相器和一个电阻,非常合适于各种数字IC的设计制造流程。
深入地分析这个皮尔斯振荡器的工作原理时,不妨把它表述成以下理想的电路形式:
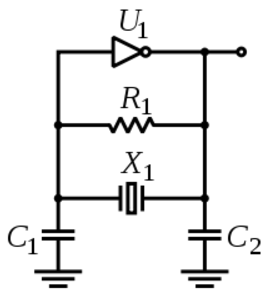
模电知识告诉我们,当期望得到一个输出信号频率为图片的振荡电路时,这个电路在图片必须满足两个条件:
●  的环路相移。
的环路相移。
● 闭环增益为1。
在上面的皮尔斯振荡器的电路原理图中,不难发现反相器U1对任意的频率分量均提供了180°,即图片的相移量。同时,反相器在输入输出之间可以看作是一个buffer,因此通过对反相器的输出特性进行调教,较容易得到1的loop gain。
到这里有人会问了,相移量只有图片,上面的两个条件连一个都没达到,这哪能起振呢?问题的关键在于电路中的其它元件上。
首先,对电路中的一颗“晶振”来说,石英晶体本身具有压电效应,对石英晶体进行适当处理后可以得到一种压电谐振器件,这就是常见的石英晶体谐振器(以下简称QCR)。对QCR的物理特性进行分析,可以发现QCR的压电谐振过程可以用以下的理想电路模型近乎完美地表示出来。
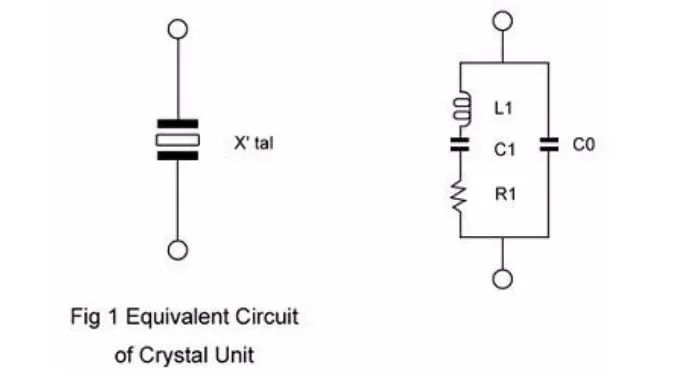
右图的电路模型中,L1-C1-R1组成了一个RLC串联谐振电路,再加上一个实际很小的C0,整个QCR电路模型有两个很接近的谐振点。QCR在电路中与反相器并联,充当的是一个选频网络的作用。整个振荡电路在上电时可以看作是反相器的输出端打进去了一个阶跃信号,QCR把阶跃中谐振点频率的信号挑出来,其他没用的踢掉,在环路增益为1的情况下整个电路趋于稳态平衡。
模电的知识告诉我们,在QCR // inverter的组合下,这个皮尔斯振荡器已经具备了一个理想的振荡电路中的两大网络(选频+放大)。貌似振荡器中的R1和C1//C2没有什么卵用啊。且慢,这个R1和C1//C2,正是这个电路中最美妙的地方。
把R1与C1//C2单独抽出来配合反相器的电路组合貌似并不好理解,假如我们换种方式呢?
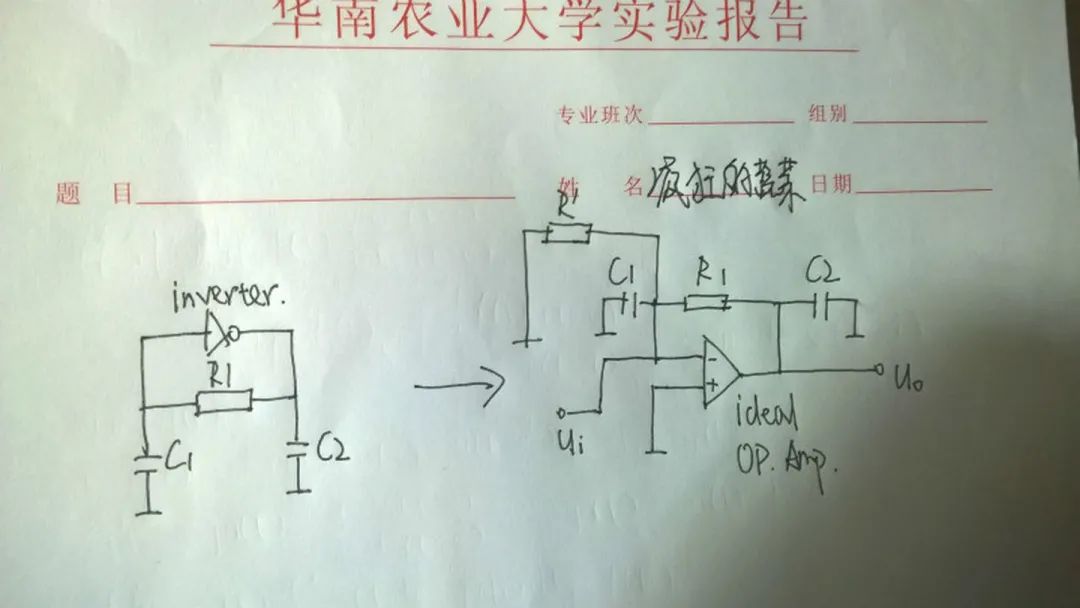
右边的运放电路除了反相结构本身提供的-180°相移外,R-C组合也提供了额外的相位延迟。更加奇妙的是这个电路组合在设计得当的情况下能够根据实际电路中各元件的误差自动调整相移大小与反相结构相互匹配(当然了谐振频率也会有少许改变),进而保证整个loop的相移满足条件1。这个“自动调整”的过程推导起来很占篇幅,在这里略过不表。
在上面的图中,还有一个很巧妙的地方,即R1是并联在反相器的输入输出端的。这个小小的电阻和反相器构成了一个反馈通路,进而使得人们能将各种模拟电路的分析设计方法用在这样一个逻辑门电路上,比如通过反馈的方法提高反相器的线性度。在这里将现实电路中反相器的非理想特性引入设计考虑的同时,却又能使电路图保持简洁易懂。
实际的MCU振荡电路是“Isolated” Pierce-Gate Oscillator,要考虑的因素比这个理论模型复杂得多,但根本原理都是一样的。振荡电路输出的波形,通过下一级的时钟发生电路(Clock Generator)进行整形调整后,得到具有稳定形状的矩形信号并输出至时钟树,作用于整个MCU的同步逻辑。
*原文地址:(来源:知乎,文:疯狂的蔬菜)
https://www.zhihu.com/question/30930577/answer/55822425
转载来源:嵌入式ARM
免责声明:本文为转载文章,转载此文目的在于传递更多信息,版权归原作者所有。本文所用视频、图片、文字如涉及作品版权问题,请联系小编进行处理(联系邮箱:cathy@eetrend.com)。



分享这篇文章,谈一下STM32启动流程。如果读者朋友已经有过汇编相关基础,能够够好理解本文内容。汇编语言是比C语言更接近机器底层的编程语言,能让我们更好的理解和操纵硬件底层。
STM32三种启动模式
下好程序后,重启芯片时,SYSCLK的第4个上升沿,BOOT引脚的值将被锁存,这就是所谓的启动过程。
STM32上电或者复位后,代码区始终从0x00000000开始,其实就是将存储空间的地址映射到0x00000000中。三种启动模式如下:
用户可以通过设置BOOT1和BOOT0引脚的状态,来选择在复位后的启动模式。STM32三种启动模式对应的存储介质均是芯片内置的,如下图:

串口下载程序原理
从系统存储器启动,这种模式启动的程序功能是由厂家设置的。一般来说,这种启动方式用的比较少。系统存储器是芯片内部一块特定的区域,STM32在出厂时,由ST在这个区域内部预置了一段BootLoader,也就是我们常说的ISP程序,这是一块ROM,出厂后无法修改。
一般来说,我们选用这种启动模式时,是为了从串口下载程序,因为在厂家提供的BootLoader中,提供了串口下载程序的固件,可以通过这个BootLoader将程序下载到系统的Flash中。
这个下载方式需要以下步骤:
从汇编代码分析STM32启动过程
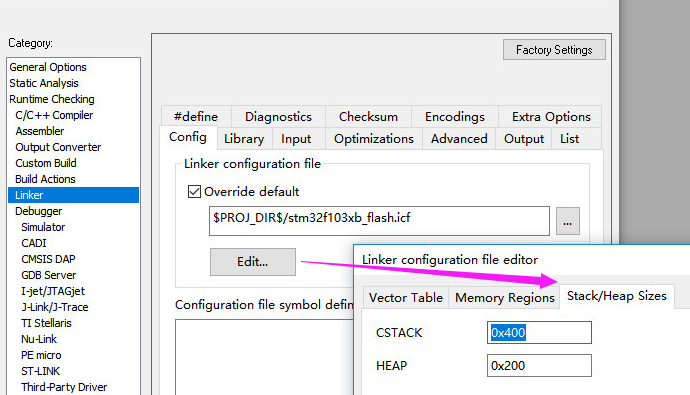
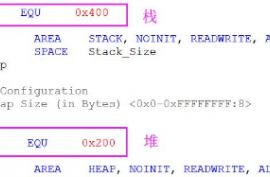
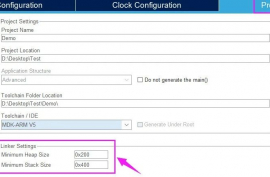
STM32的启动文件与编译器有关,不同编译器,它的启动文件不同。虽然启动文件(汇编)代码各有不同,但它们原理类似,都属于汇编程序。拿基于MDK-ARM的启动文件来举例,说一下要点内容。在基于MDK的启动文件开始,有一段汇编代码是分配堆栈大小的。
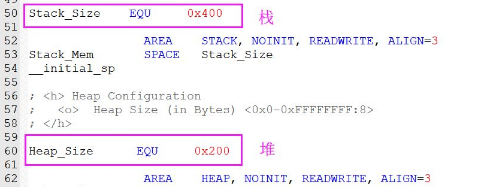
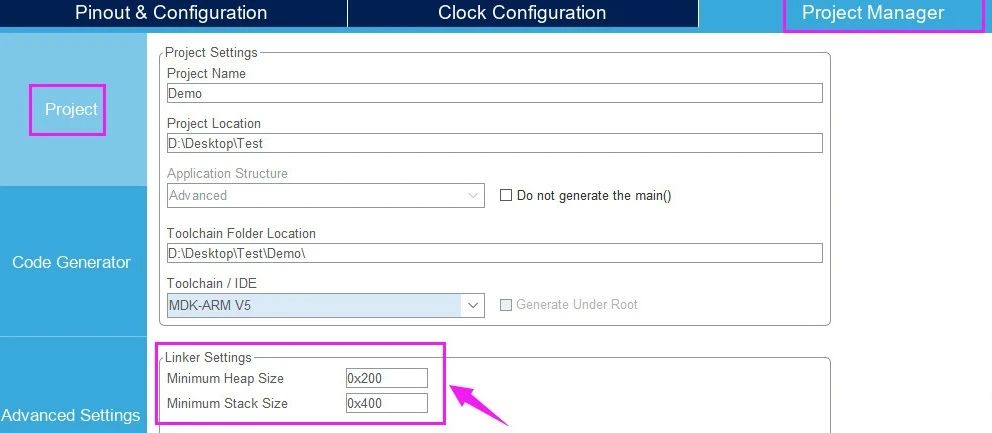
这里重点知道堆栈数值大小就行。还有一段AREA(区域),表示分配一段堆栈数据段。可以使用STM32CubeMX对上面的数值大小进行配置:
在IAR中,是通过工程配置堆栈大小:
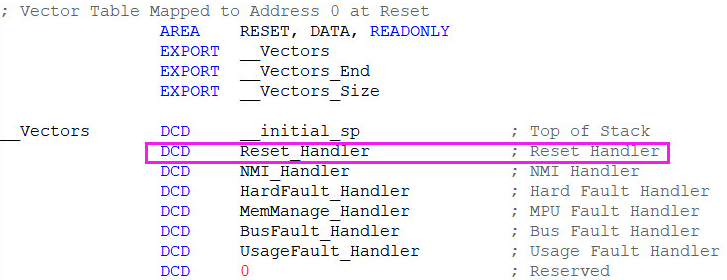
看下面的汇编代码,程序上电之后,是跳到Reset_Handler这个位置。
知道代码是从Reset_Handler开始执行,再来看如下Reset_Handler汇编代码。在启动的时候,执行了SystemInit这个函数。
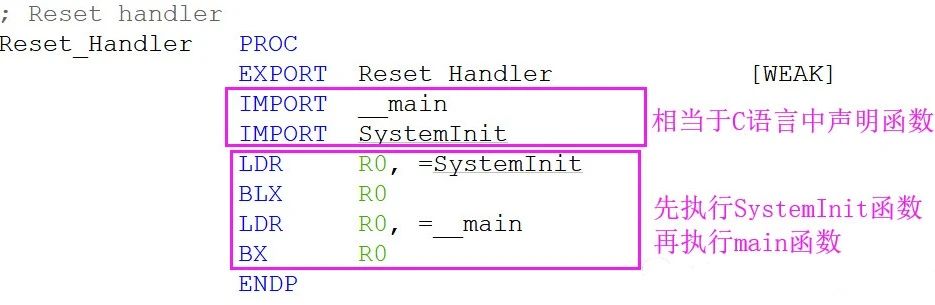
执行完SystemInit函数,初始化了系统时钟,之后跳转到main函数执行。
来源:单片机与嵌入式
免责声明:本文为转载文章,转载此文目的在于传递更多信息,版权归原作者所有。本文所用视频、图片、文字如涉及作品版权问题,请联系小编进行处理(联系邮箱:cathy@eetrend.com)。




cathy 在 提交
程序员多数都用过版本管理工具SVN,该软件具有代码的比较功能,既能很好的管理不同版本的代码,又能比较版本的更改,是一个很好用的软件工具。除此之外,还有哪些代码比较工具呢?和大家分享一下。
俗话说:三句不离本行,对于程序员这个可爱的群体来说也是一样,即使面对无休无止的编程工作,程序员们依旧任劳任怨的埋头苦干,梦想着用自己码下的代码改变世界。工欲善其事,必先利其器,每一位程序员都有自己私藏的编程必备工具,接下来就给大家推荐5款程序员最佳的代码比较工具。
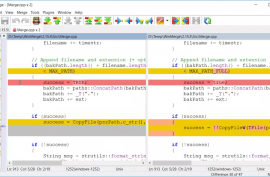
一、Beyond Compare
Beyond Compare可以很方便地对比出两份源代码文件之间的不同之处,相差的每一个字节用颜色加以表示,查看方便,支持多种规则对比。
Beyond Compare选择最好的方法来突出不同之处,文本文件可以用语法高亮和设置比较规则的方法进行查看和编辑,适用于用于文档、源代码和HTML。
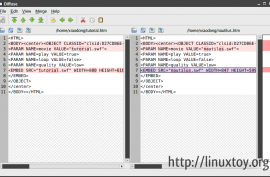
二、Diffuse
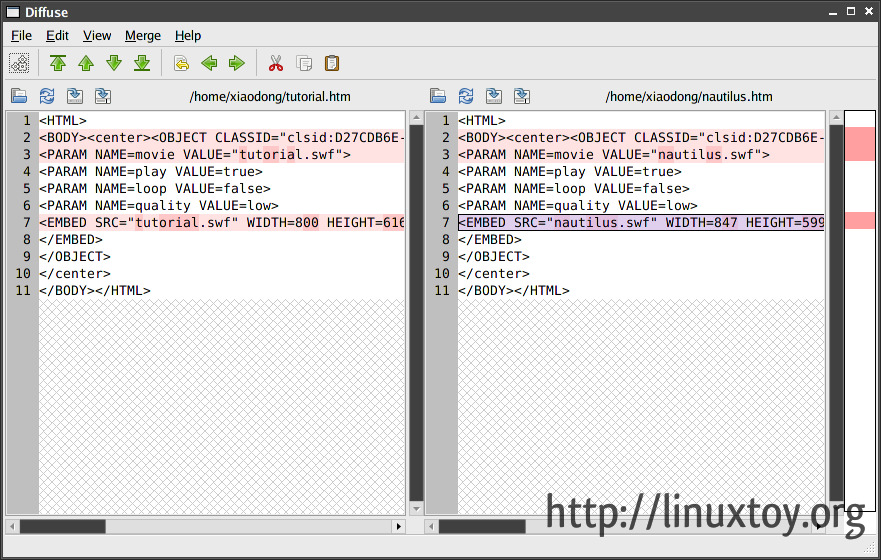
Diffuse在命令行中的速度是相当快的,支持像 C++、Python、Java、XML 等语言的语法高亮显示。可视化比较,非常直观,支持两相比较和三相比较。这就是说,使用 Diffuse 你可以同时比较两个或三个文本文件。
支持常见的版本控制工具,包括 CVS、subversion、git、mercurial 等,你可以通过 Diffuse 直接从版本控制系统获取源代码,以便对其进行比较和合并。
三、WinMerge
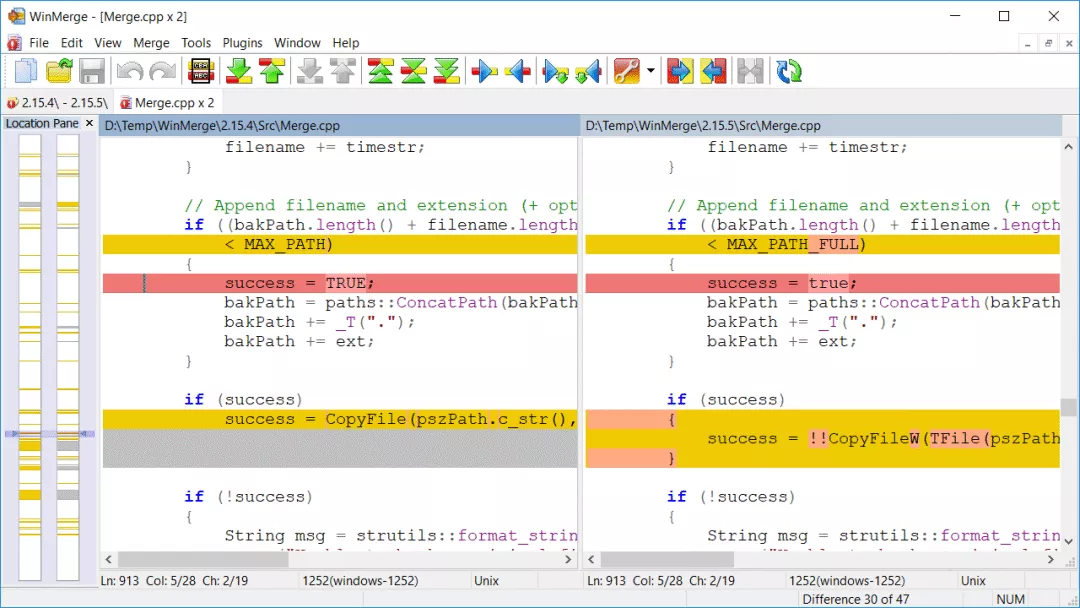
一款运行于Windows系统下的文件比较和合并工具,使用它可以非常方便地比较多个文档内容,适合程序员或者经常需要撰写文稿的朋友使用。
WinMerge会将两个文件内容做对比,并在相异之处以高亮度的方式显示,让使用者可以很快的查知;可以直接让左方的文件内容直接覆盖至右方,或者反过来也可以覆盖。
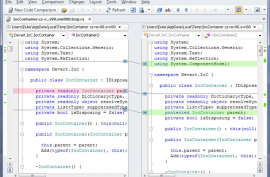
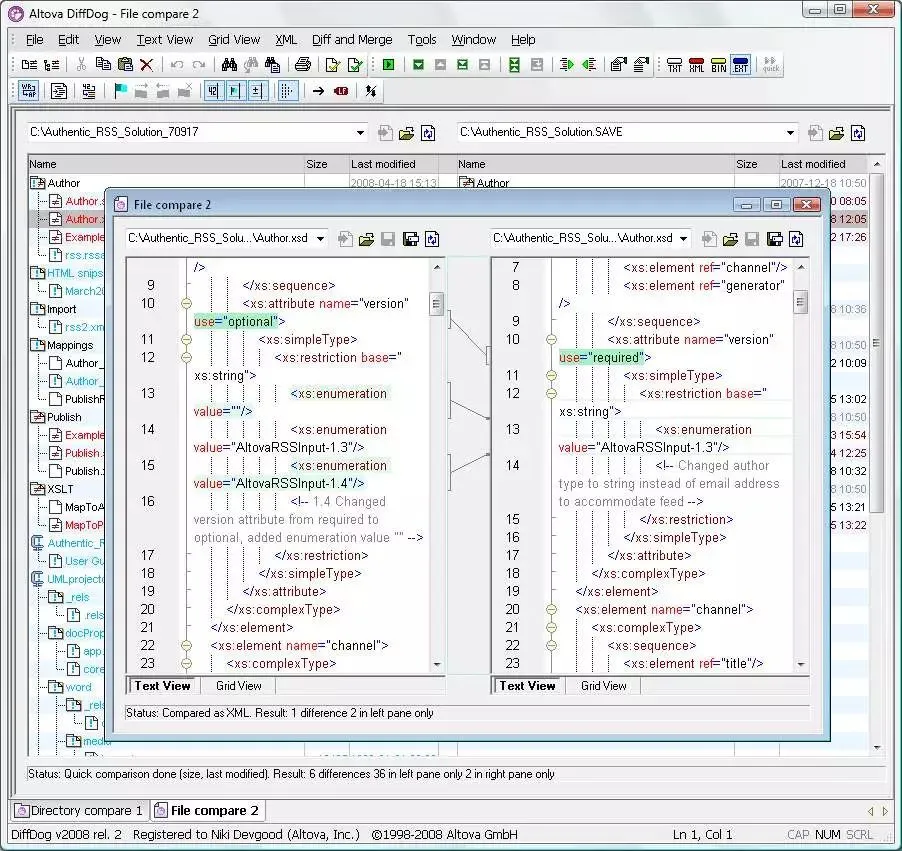
四、Code Compare
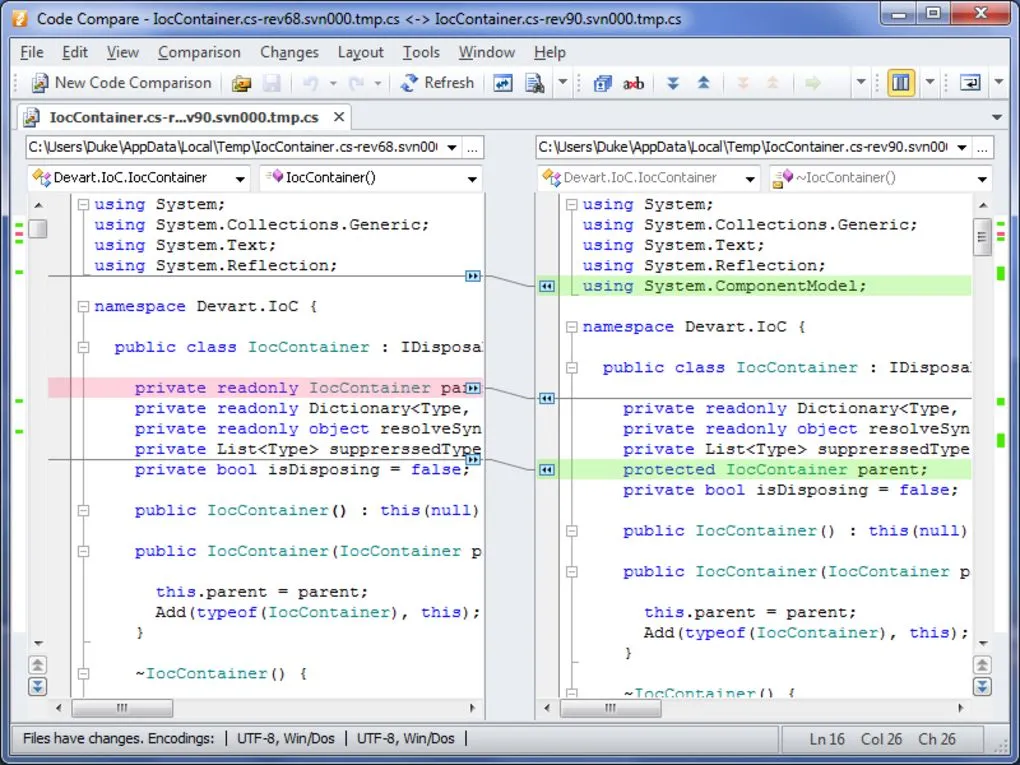
Code Compare是一款用于程序代码文件的比较工具,目前Code Compare支持的对比语言有:C#、C++、CSS、HTML、Java、JavaScrip等代码语言。
Visual Studio环境源代码比较是一个方便,易于使用的工具,独特的Visual Studio集成,可以帮助你同时在一个环境内,使所有的方便程序开发设计。
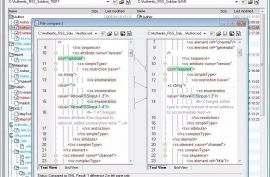
五、AptDiff
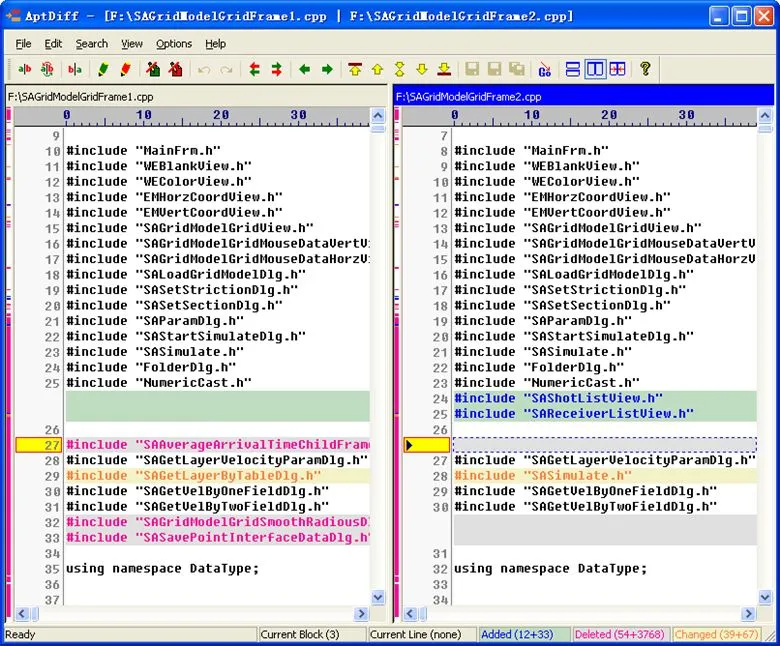
AptDiff是一个文件比较工具,可以对文本和二进制文件进行比较和合并,适用于软件开发、网络设计和其它的专业领域。
它使用方便,支持键盘快捷键,可以同步进行横向和纵向卷动,支持Unicode格式和大于4GB的文件,可以生成HTML格式的比较报告。
来源:玩转嵌入式
免责声明:本文为转载文章,转载此文目的在于传递更多信息,版权归原作者所有。本文所用视频、图片、文字如涉及作品版权问题,请联系小编进行处理(联系邮箱:cathy@eetrend.com)。