嵌入式编程的需求千变万化,要做到系统稳定,又要代码可复用,就要做到高内聚低耦合。
前言
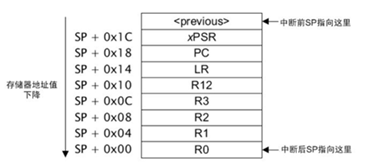
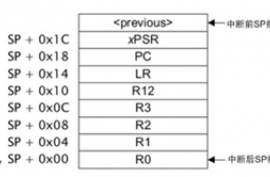
我们通常认为,在中断中,不能执行耗时的操作,否则会影响系统的稳定性,尤其对于嵌入式编程。对于带操作系统的程序而言,可以通过操作系统的调度,将中断处理分成两个部分,耗时的操作可以放到线程中去执行,但是对于没有操作系统的情况,又应该如何处理呢
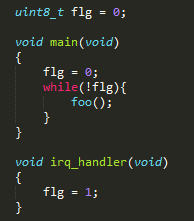
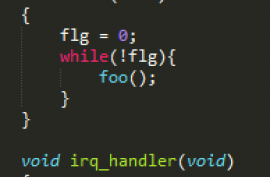
比较常见的,我们可能会定义一些全局变量,作为flag,然后在mainloop中不停的判断这些flag,再在中断中修改这些flag,最后在mainloop中执行具体的逻辑,但是这样,无疑会增加耦合,增加程序维护成本。
cpost
cpost正是应用在这种情况下的一个简单但又十分方便的工具,它可以特别方便的进行上下文的切换,减少模块耦合。
cpost链接:
https://github.com/NevermindZZT/cpost
cpost借鉴的Android的handler机制,通过在mainloop中跑一个任务,然后在其他地方,可以是中断,也可以是模块逻辑中,直接抛出需要执行的函数,使其脱离调用处的上下文,运行在mainloop中。cpost还支持延迟处理,可以指定函数在抛出后多久执行
使用
cpost的使用十分简单,这里以使用在嵌入式无操作系统中为例,主要用作中断延迟处理的情况
1、配置系统tick
配置cpost.h中的宏CPOST_GET_TICK(),配置成获取系统tick,以stm32 hal为例
#define CPOST_GET_TICK() HAL_GetTick()
2、配置处理进程
在mainloop调用cpostProcess函数
int main(void)
{
...
while (1)
{
cpostProcess();
}
return 0;
}
3、抛出任务
在中断等需要进行上下文切换的地方调用cpsot接口,使其在mainloop中运行
cpost(intHandler);
原理解析
cpost的原理其实很简单,其代码量也十分少,总共加起来就只有几十行代码,cpost维护了一个而全局的数组
CpostHandler cposhHandlers[CPOST_MAX_HANDLER_SIZE] = {0};
其中,数组的每一个元素表示包含了需要执行的函数和参数,当调用cpost接口时,被post的函数和参数会被保存在这个数组中,然后mainloop中运行的cpostProcess函数会遍历这个数组,当满足条件时,执行对应的函数,从而达到上下文切换的目的
void cpostProcess(void)
{
for (size_t i = 0; i < CPOST_MAX_HANDLER_SIZE; i++)
{
if (cposhHandlers[i].handler)
{
if (cposhHandlers[i].time == 0 || CPOST_GET_TICK() >= cposhHandlers[i].time)
{
cposhHandlers[i].handler(cposhHandlers[i].param);
cposhHandlers[i].handler = NULL;
}
}
}
}
其实,cpost的方式,和一开始提到的使用全局的flag进行上下文切换的方法很像,只不过,cpost通过一个数组的维护和直接post函数的方式,省去了维护flag的成本,也不需要将需要执行的函数耦合到mianloop中,从而变得简单易用。
完美解耦 - cevent应用
对于模块化编程来说,如何实现各模块间的解耦一直是一个比较令人头疼的问题,特别是对于嵌入式编程,由于控制逻辑复杂,并且对程序体积有控制,经常容易写出各独立模块之间相互调用的问题。由此,cpost中的cevent组件,通过模仿Android系统中的广播机制,提供了一种非常简单的模块间解耦实现。
原理
cevent借鉴的是Android系统的广播机制,一方面,各模块在工作的时候,都会有多个具体的事件点,在高耦合的编程中,可能会在这些地方调用其他模块的功能,比如说,在通信模块接收到指令的时候,需要闪烁一下指示灯。
使用cevent,我们可以在这些地方抛出一个事件,当前模块不需要关心在这各地方需要执行哪些其他模块的逻辑,由其他模块,或者用户定义一个事件监听,当具体的事件发生时,执行相应的动作。
使用
cevent使用注册的方式监听事件,会依赖于编译环境,目前支持keil,iar,和gcc,对于gcc,需要修改链接文件(.ld),在只读数据区添加:
_cevent_start = .;
KEEP (*(cEvent))
_cevent_end = .;
1、初始化cevent
系统初始化时,调用ceventInit
ceventInit();
2、注册cevent事件监听
在c文件中,调用CEVENT_EXPORT导出事件监听
CEVENT_EXPORT(0, handler, (void *)param);
3、发送cevent事件
在事件发生的地方,调用ceventPost抛出事件
ceventPost(0);
使用cevent解耦模块初始化
嵌入式编程中,我们习惯会在程序启动的时候,调用各个模块的初始化函数,其实这也是一种耦合,会造成main函数中出现很长的初始化代码,借助cevent,我们可以对初始化进行优化解耦。
1、定义初始化事件
定义初始化事件的值,对于初始化,有些模块可能会依赖于其他模块的初始化,会有一个先后顺序要求,所以这里我们可以把初始化分成两个阶段,定义两个事件,当然,如果有更复杂的要求,可以再多分几个阶段,只需要多定义几个事件就行
#define EVENT_INIT_STAGE1 0
#define EVENT_INIT_STAGE2 1
2、初始化cevent,抛出事件
在main函数中初始化cevent,并抛出初始化事件
int main(void)
{
...
ceventInit();
ceventPost(EVENT_INIT_STAGE1);
ceventPost(EVENT_INIT_STAGE2);
...
return 0;
}
3、注册事件监听
对所有需要初始化的函数注册事件监听,这里我以对letter-shell注册事件监听为例,分为两个部分,初始化串口和初始化shell。
在serial模块中,将串口初始化注册到初始化第一阶段,cevent支持将不大于7个的参数直接传递到注册的监听函数中,下面的注册方式,相当于在EVENT_INIT_STAGE1事件发生的地方,也就是main函数中对应的位置,调用serialInit(&debugSerial)
CEVENT_EXPORT(EVENT_INIT_STAGE1, serialInit, (void *)(&debugSerial));
然后再shell模块中,将shell初始化函数注册到初始化第二阶段。
CEVENT_EXPORT(EVENT_INIT_STAGE1, shellInit);
使用cevent解耦mainloop
再无操作系统的嵌入式编程中,我们如果同时希望运行多个模块的逻辑,通常是在mainloop中循环调用,这种将函数写入mainloop的做法,也会增加耦合
int main(void)
{
...
while (1)
{
// 写在mainloop中的模块逻辑
shellTask(&shell);
LedProcess();
...
}
return 0;
}
通过使用cevent,也可以很方便的消除这种耦合
1、定义mainloop事件
定义mainloop事件的值
#define EVENT_MAIN_LOOP 3
2、在mainloop中抛出事件
去掉mainloop中对其他模块的调用,改为排除mainloop事件
int main(void)
{
...
while (1)
{
ceventPost(EVENT_MAIN_LOOP);
}
return 0;
}
3、在各模块中注册事件监听
分别在各个模块中,注册对mainloop事件的监听
CEVENT_EXPORT(EVENT_MAIN_LOOP, shellTask, (void *)(&shell));
CEVENT_EXPORT(EVENT_MAIN_LOOP, LedProcess);
结语
cevent是一个非常小的模块,本身代码及其简单,但是,通过模仿广播机制,让cevent可以发挥很强大的功能,通过,还可以结合cpost,实现延迟事件等功能。
来源:
https://blog.csdn.net/qq_34245464/article/details/111804661