红外
器件适用于遥控应用,提高了光辐射和射频辐射抑制能力
日前,Vishay Intertechnology, Inc.宣布,推出用于IR遥控应用的三个新一代系列微型红外 (IR) 接收器模块---TSOP93xxx、TSOP94xxx和TSOP98xxx。Vishay Semiconductors TSOP93xxx、TSOP94xxx和TSOP98xxx系列器件提高了黑暗环境和复杂光源干扰环境下红外信号的灵敏度, 具有更好的射频噪声抑制能力和优异的脉宽精度。
今天发布的接收器可用于电视、机顶盒(STB)、音响系统、空调、视频投影仪、相机、视频游戏系统等产品。新器件增强了这些产品遥控功能对于各种干扰的抵御能力,如水银灯红外辐射和电路板Wi-Fi天线的射频辐射。此外,模块提高了脉宽精度,可降低几乎任何编码的误码率,而且器件对电源电压变化和波纹噪声不敏感。
为简化设计,接收器将光探测器、前置放大器电路和红外滤波器集成于3引脚的环氧树脂Minimold(TSOP93xxx)、Mold(TSOP94xxx)或Minicast(TSOP98xxx)封装中。每个系列器件的载波频率从30 kHz到56 kHz,有五个用于短脉冲和长脉冲编码的自动增益控制(AGC)版本。接收器供电电压为2.0 V至3.6 V,典型电源电流为0.37 mA,符合RoHS和Vishay绿色标准,无卤素。
新的IR接收器模块现可提供样品并已实现量产,供货周期为四周至六周。
有关光电器件的最新信息—文章、视频和产品—请访问 Vishay 的光电产品博客网站:
www.vishayopto.com 。
本文设计的是一款基于单片机的红外智能空调遥控器,这种遥控器能采用测量脉冲宽度的方法学习红外信号,同时使用游程编码算法对数据进行压缩后存储,并利用单片机内部定时器PWM模式产生红外载波,成功实现了对红外遥控的学习与再现。
下面请看详细设计流程。
系统总体结构与硬件设计
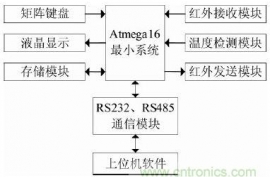
系统采用模块化设计,各模块通过接口电路与主控芯片相连。主要模块有:矩阵键盘,液晶显示,存储模块,红外发送模块,红外接收模块,RS232、RS485 通信模块,以及温度检测模块。系统结构图如图1 所示。
系统以Atmega16 单片机作为主控芯片,Atmega16具有16K 字节的系统内可编程Flash ,512 字节EEPROM,1K 字节SRAM,32 个通用I/O 口线,32 个通用工作寄存器,用于边界扫描的JTAG 接口,支持片内调试与编程,三个具有比较模式的灵活的定时器/计数器(T/C),片内/外中断,可编程串行USART,有起始条件检测器的通用串行接口,8 路10 位具有可选差分输入级可编程增益的ADC,具有片内振荡器的可编程看门狗定时器,一个SPI 串行端口,以及六个可以通过软件进行选择的省电模式。该芯片功能强大,满足系统设计需要并提供了充分的扩展空间。主控芯片使用8MHz 的晶振,晶振电路靠近主控芯片,尽量减少输入噪声。复位电路采用低电平复位。

矩阵键盘采用3*3 的设计,设置了8 个功能键,方便用户进行手动操作。其中单独设计了一颗模式切换键,可在学习、发射、通信模式中切换。为了实现学习功能, 红外接收模块使用了一体化接收头NB1838,其光电检测和前置放大器集成于同一封装,中心频率为37.9KHz. NB1838 的环氧树脂封装结构为其提供了一个特殊的红外滤光器,对自然光和电场干扰有很强的防护性。NB1838 对接收到的红外信号进行放大、检波、整形,并调制出红外编码,得到TTL 波形,反相后输入单片机,再由单片机进行进一步的处理,存储到EEPROM 中,接收电路如图2 所示。

考虑到系统需要的存储空间比较大,设计了单独的存储模块,选用的EEPROM 是AT24C64,它提供了8KB 的容量,通过IIC 协议与Atmega16 TWI 接口通信,将学习到的红外指令存储在此,掉电不丢失。
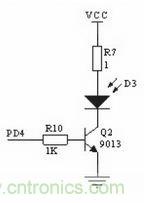
在发射模式下,系统从EEPROM 读取相应数据信息,利用三极管9013 组成的放大电路,通过大功率红外发射管将调制好的红外信号发射出去。发射电路如图3所示,非发送状态时,三极管工作在截止状态,红外发射管不工作,有利于降低功耗以及延长红外发射管的使用寿命。经实际测试,发射距离可达到10m 左右。
通信模式中,系统通过RS232 电路与上位机通信,在与上位机通信时使用DS18B20 反馈温度信息,DS18B20 一线总线设计大大提高了系统的抗干扰性,独特而且经济。系统还增加了RS485 模块,便于组网,以实现对多个红外设备进行控制。RS485 在组网时只需要用一对双绞线将子设备的"A"、"B"端连接起来,这种接线方式为总线式拓扑结构,在同一总线上可挂接多个结点,连接方便。
为了增加设备的实用性,系统设计了两个电源方案,一个是直接接入5V 直流电源,一个是接入12V直流电源,然后通过L7805 构成的变压电路降压为5V使用。
系统软件设计与实现
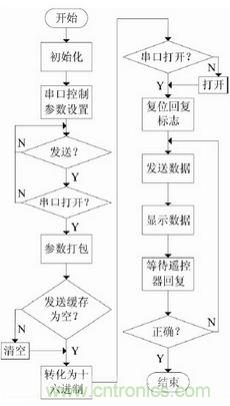
系统程序主要分为三个部分:学习模式,发送模式以及通信模式。当第一次进入系统时,初始化设置设备地址,然后设置通信的波特率,提供1200、9600 以及19200 三种选择。系统主程序即在三个模式间切换,默认进入通信模式,可以通过模式切换按键改变模式,也可以通过上位机直接更改。出于系统的稳定性需要,在程序中加入了软件看门狗,防止程序"跑飞".
学习功能设计
学习模式
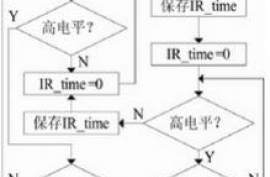
红外遥控器的码型多样,编码一般包括:帧头、系统码、操作码、同步码、帧间隔码、帧尾,且同步码与帧间隔码出现的位置不固定,因此码型格式灵活多变,很难区分各种码型的编码含义;各个红外遥控的编码长度不尽相同,发送方式也多种多样,最常用的有三种:完整帧只发送一次、完整帧重复发送两次、先发送一个完整帧,后重复发送帧头和一个脉冲。面对如此多样化的编码方式,如果区分每种编码的含义进行学习,学习的复杂度将会很高,并且通用性也会受到影响。所以,为了避开各色码型的干扰,系统在学习时并不关心码型数据的实际意义,只记录脉冲的时间宽度。系统主要针对载波频率为38KHz(周期为26us)的红外遥控器,利用变量IR_time 记录接收到的脉冲宽度。学习程序流程如图4 所示。

压缩存储
由于不考虑具体的码型数据意义,只记录脉冲的宽度,系统的学习功能通用性得到了提高,但这种方式学习到的数据量很大,对存储的要求就变得很高。
尽管系统针对存储的大容量需求设计了单独的存储模块,但考虑到应在不增加硬件开销的情况下保证足够的存储容量,以及满足未来扩展的需要,在进行数据存储时,采取了数据压缩技术。
从学习到的电平数据可以发现,无论数据是1 还是0,都有相同时长的电平出现,这符合游程编码的特点。游程编码是一种简单的非破坏性资料压缩法,其好处是加压缩和解压缩都非常快,其方法是计算连续出现的资料长度压缩之。比如:一张二值图像的数据为:
WWWWWWWWBWWWWBBBWWWWWWWBWWWWW
使用游程编码压缩可得:8W1B4W3B7W1B 5W.
可见,压缩效率极高,且可避免复杂的编码和解码运算。所以,在存储时,系统对学习到的数据进行游程编码压缩[7,8].例如,学习到的一组空调遥控器的数据为[157 153 23 53 … 23 53 23 180 156 152 23 53 …53 23],如图5 所示,对重复的电平数据采用游程编码压缩后,原本需要199 字节的空调遥控码,只需要106个字节即可存储,压缩率达53.27%.因此,在存储时针对学习到的数据特点采取游程编码压缩,可以有效节约存储空间。
发射功能设计
现有的红外遥控器很多都是采用外部电路产生载波信号,例如使用NEC555 振荡器产生载波信号。为了减少硬件开销,本系统使用单片机内部的定时器产生载波。系统使用的是Atmega16 单片机,其定时器功能强大,具有普通模式、CTC 模式、快速PWM 模式、相位修正PWM 模式等工作模式,系统利用定时器1,使其工作在快速PWM 模式,产生占空比为1:3 的38KHz 的PWM 波。当发送某条指令时,单片机从对应的EEPROM 中提取指令信息,然后调制到生成的载波上,再通过发射电路即可完成红外信号的发射。
通信功能设计
上位机通信
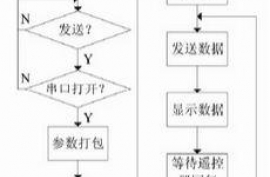
本遥控器除了能通过功能按键实现手动操作外,还可以通过上位机软件对遥控器进行控制。遥控器与上位机通过RS232 模块进行通信,首先配置上位机软件,确定串口号,选择与设备相同的波特率及主从设备地址,然后根据需要选择相应的指令,点击发送即可通过上位机对设备进行控制。由于本遥控器是基于空调遥控器进行研究的,在与上位机通信时,系统中的温度检测模块会上传实时温度,便于用户进行调整。图6 为上位机软件流程图。
组网控制
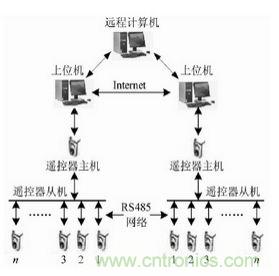
为了实现对多个设备的联网控制,还设计了RS485 模块。各子遥控器通过RS485 模块的"A"、"B"端连接在一起,组成控制网络,如图7 所示,其中一个作为主遥控器,与上位机通过RS232 模块进行串口通信。当上位机需要对某个子设备进行控制时,选择相应的子设备地址号,发送指令即可,主遥控器收到指令信息后,会将指令发给对应的子设备。与主遥控器相连的上位机PC 连接Internet,作为本地服务器,可实现远程控制。
用户登录远程客户端,经身份验证后与服务器建立连接,可发送指令给本地服务器,本地服务器再经过串口通信对遥控器进行相应操作。如果遥控器主机与上位机距离较远,RS232 不能满足通信需要,也可不使用遥控器主机,在上位机PC 上使用RS232-485 转接头,通过RS485 直接将遥控器网络与PC 机485 接口相连,利用上位机对遥控器网络直接进行控制。
本文设计了一款智能空调遥控器。该系统采用只记录红外信号脉冲宽度,不考虑红外编码格式的方式,通过游程编码算法将红外信号压缩后保存到EEPROM 中,并直接利用主控芯片定时器的PWM 模式产生38KHz 的载波,节约了硬件成本,除手动操作外还可以通过上位机对遥控器进行控制,使用方便。
系统成功实现了对多种空调遥控器的学习与功能再现,操作灵活,性能稳定。本系统还可用于智能家居中,对不同的红外设备进行控制,也可用于远程网络控制,为智能家居及远程监控提供了一种实现方法。
来源:中国百科网



1、前言
本文设计了一款针对空调设备的智能学习型红外遥控器,采用记录脉冲宽度的方法,成功实现了对多种红外空调遥控信号的学习与再现,真正实现了"万能"。本文在阐述了系统的总体结构及硬件设计的基础上,详细研究了系统学习,发送及通信功能的软件设计与实现。
2、系统总体结构与硬件设计
系统采用模块化设计,各模块通过接口电路与主控芯片相连。主要模块有:矩阵键盘,液晶显示,存储模块,红外发送模块,红外接收模块,RS232、RS485 通信模块,以及温度检测模块。
系统以Atmega16 单片机作为主控芯片,Atmega16具有16K 字节的系统内可编程Flash ,512 字节EEPROM,1K 字节SRAM,32 个通用I/O 口线,32 个通用工作寄存器,用于边界扫描的JTAG 接口,支持片内调试与编程,三个具有比较模式的灵活的定时器/计数器(T/C),片内/外中断,可编程串行USART,有起始条件检测器的通用串行接口,8 路10 位具有可选差分输入级可编程增益的ADC,具有片内振荡器的可编程看门狗定时器,一个SPI 串行端口,以及六个可以通过软件进行选择的省电模式。该芯片功能强大,满足系统设计需要并提供了充分的扩展空间。主控芯片使用8MHz 的晶振,晶振电路靠近主控芯片,尽量减少输入噪声。复位电路采用低电平复位。
矩阵键盘采用3*3 的设计,设置了8 个功能键,方便用户进行手动操作。其中单独设计了一颗模式切换键,可在学习、发射、通信模式中切换。为了实现学习功能, 红外接收模块使用了一体化接收头NB1838,其光电检测和前置放大器集成于同一封装,中心频率为37.9KHz. NB1838 的环氧树脂封装结构为其提供了一个特殊的红外滤光器,对自然光和电场干扰有很强的防护性。NB1838 对接收到的红外信号进行放大、检波、整形,并调制出红外编码,得到TTL 波形,反相后输入单片机,再由单片机进行进一步的处理,存储到EEPROM 中。
考虑到系统需要的存储空间比较大,设计了单独的存储模块,选用的EEPROM 是AT24C64,它提供了8KB 的容量,通过IIC 协议与Atmega16 TWI 接口通信,将学习到的红外指令存储在此,掉电不丢失。
在发射模式下,系统从EEPROM 读取相应数据信息,利用三极管9013 组成的放大电路,通过大功率红外发射管将调制好的红外信号发射出去。发射电路如图3所示,非发送状态时,三极管工作在截止状态,红外发射管不工作,有利于降低功耗以及延长红外发射管的使用寿命。经实际测试,发射距离可达到10m 左右。
通信模式中,系统通过RS232 电路与上位机通信,在与上位机通信时使用DS18B20 反馈温度信息,DS18B20 一线总线设计大大提高了系统的抗干扰性,独特而且经济。系统还增加了RS485 模块,便于组网,以实现对多个红外设备进行控制。RS485 在组网时只需要用一对双绞线将子设备的"A"、"B"端连接起来,这种接线方式为总线式拓扑结构,在同一总线上可挂接多个结点,连接方便。
为了增加设备的实用性,系统设计了两个电源方案,一个是直接接入5V 直流电源,一个是接入12V直流电源,然后通过L7805 构成的变压电路降压为5V使用。
3、系统软件设计与实现
系统程序主要分为三个部分:学习模式,发送模式以及通信模式。当第一次进入系统时,初始化设置设备地址,然后设置通信的波特率,提供1200、9600 以及19200 三种选择。系统主程序即在三个模式间切换,默认进入通信模式,可以通过模式切换按键改变模式,也可以通过上位机直接更改。出于系统的稳定性需要,在程序中加入了软件看门狗,防止程序"跑飞".
3.1 学习功能设计
3.1.1 学习模式
红外遥控器的码型多样,编码一般包括:帧头、系统码、操作码、同步码、帧间隔码、帧尾,且同步码与帧间隔码出现的位置不固定,因此码型格式灵活多变,很难区分各种码型的编码含义;各个红外遥控的编码长度不尽相同,发送方式也多种多样,最常用的有三种:完整帧只发送一次、完整帧重复发送两次、先发送一个完整帧,后重复发送帧头和一个脉冲。面对如此多样化的编码方式,如果区分每种编码的含义进行学习,学习的复杂度将会很高,并且通用性也会受到影响。所以,为了避开各色码型的干扰,系统在学习时并不关心码型数据的实际意义,只记录脉冲的时间宽度。系统主要针对载波频率为38KHz(周期为26us)的红外遥控器,利用变量IR_time 记录接收到的脉冲宽度。
3.1.2 压缩存储
由于不考虑具体的码型数据意义,只记录脉冲的宽度,系统的学习功能通用性得到了提高,但这种方式学习到的数据量很大,对存储的要求就变得很高。
尽管系统针对存储的大容量需求设计了单独的存储模块,但考虑到应在不增加硬件开销的情况下保证足够的存储容量,以及满足未来扩展的需要,在进行数据存储时,采取了数据压缩技术。
从学习到的电平数据可以发现,无论数据是1 还是0,都有相同时长的电平出现,这符合游程编码的特点。游程编码是一种简单的非破坏性资料压缩法,其好处是加压缩和解压缩都非常快,其方法是计算连续出现的资料长度压缩之。比如:一张二值图像的数据为:
WWWWWWWWBWWWWBBBWWWWWWWBWWWWW
使用游程编码压缩可得:8W1B4W3B7W1B 5W.
可见,压缩效率极高,且可避免复杂的编码和解码运算。所以,在存储时,系统对学习到的数据进行游程编码压缩[7,8].例如,学习到的一组空调遥控器的数据为[157 153 23 53 … 23 53 23 180 156 152 23 53 …53 23],如图5 所示,对重复的电平数据采用游程编码压缩后,原本需要199 字节的空调遥控码,只需要106个字节即可存储,压缩率达53.27%.因此,在存储时针对学习到的数据特点采取游程编码压缩,可以有效节约存储空间。
3.2 发射功能设计
现有的红外遥控器很多都是采用外部电路产生载波信号,例如使用NEC555 振荡器产生载波信号。为了减少硬件开销,本系统使用单片机内部的定时器产生载波。系统使用的是Atmega16 单片机,其定时器功能强大,具有普通模式、CTC 模式、快速PWM 模式、相位修正PWM 模式等工作模式,系统利用定时器1,使其工作在快速PWM 模式,产生占空比为1:3 的38KHz 的PWM 波。当发送某条指令时,单片机从对应的EEPROM 中提取指令信息,然后调制到生成的载波上,再通过发射电路即可完成红外信号的发射。
3.3 通信功能设计
3.3.1 上位机通信
本遥控器除了能通过功能按键实现手动操作外,还可以通过上位机软件对遥控器进行控制。遥控器与上位机通过RS232 模块进行通信,首先配置上位机软件,确定串口号,选择与设备相同的波特率及主从设备地址,然后根据需要选择相应的指令,点击发送即可通过上位机对设备进行控制。由于本遥控器是基于空调遥控器进行研究的,在与上位机通信时,系统中的温度检测模块会上传实时温度,便于用户进行调整。
3.3.2 组网控制
为了实现对多个设备的联网控制,还设计了RS485 模块。各子遥控器通过RS485 模块的"A"、"B"端连接在一起,组成控制网络,如图7 所示,其中一个作为主遥控器,与上位机通过RS232 模块进行串口通信。当上位机需要对某个子设备进行控制时,选择相应的子设备地址号,发送指令即可,主遥控器收到指令信息后,会将指令发给对应的子设备。与主遥控器相连的上位机PC 连接Internet,作为本地服务器,可实现远程控制。
用户登录远程客户端,经身份验证后与服务器建立连接,可发送指令给本地服务器,本地服务器再经过串口通信对遥控器进行相应操作。如果遥控器主机与上位机距离较远,RS232 不能满足通信需要,也可不使用遥控器主机,在上位机PC 上使用RS232-485 转接头,通过RS485 直接将遥控器网络与PC 机485 接口相连,利用上位机对遥控器网络直接进行控制。
4、结语
本文设计了一款智能空调遥控器。该系统采用只记录红外信号脉冲宽度,不考虑红外编码格式的方式,通过游程编码算法将红外信号压缩后保存到EEPROM 中,并直接利用主控芯片定时器的PWM 模式产生38KHz 的载波,节约了硬件成本,除手动操作外还可以通过上位机对遥控器进行控制,使用方便。
系统成功实现了对多种空调遥控器的学习与功能再现,操作灵活,性能稳定。本系统还可用于智能家居中,对不同的红外设备进行控制,也可用于远程网络控制,为智能家居及远程监控提供了一种实现方法。
来源:51单片机设计
遥控器使用方便,功能多.目前已广泛应用在电视机、VCD、DVD、空调等各种家用电器中,且价格便宜,市场上非常容易买到。如果能将遥控器上许多的按键解码出来.用作单片机系统的输入.则解决了常规矩阵键盘线路板过大、布线复杂、占用I/O口过多的弊病。而且通过使用遥控器,操作时可实现人与设备的分离,从而更加方便使用。下面以TC9012编码芯片的遥控器为例。谈谈如何用常用的51系统单片机进行遥控的解码。
通用红外遥控系统由发射和接收两大部分组成,应用编/解码专用集成电路芯片来进行控制操作,如图所示。发射部分包括键盘矩阵、编码调制、LED红外发送器;接收部分包括光、电转换放大器、解调、解码电路。
一、编码格式
1、0和1的编码
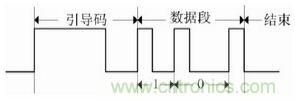
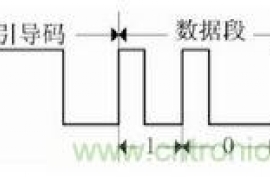
当发射器按键按下后,即有遥控码发出,所按的键不同遥控编码也不同。这种遥控码具有以下特征:采用脉宽调制的串行码,以脉宽为0.565ms、间隔0.56ms、周期为1.125ms的组合表示二进制的“0”;以脉宽为0.565ms、间隔1.685ms、周期为2.25ms的组合表示二进制的“1”,其波形如图所示。
遥控器发射的信号由一串0和1的二进制代码组成.不同的芯片对0和1的编码有所不同。通常有曼彻斯特编码和脉冲宽度编码。TC9012的0和1采用PWM方法编码,即脉冲宽度调制,其0码和1码如图所示(以遥控接收输出的波形为例)。0码由0.56ms低电平和0。56ms高电平组合而成,脉冲宽度为1.12ms.1码由0.56ms低电平和1.69ms高电平组合而成,脉冲宽度为2.25ms。在编写解码程序时.通过判断脉冲的宽度,即可得到0或1。
UPD6121G产生的遥控编码是连续的32位二进制码组,其中前16位为用户识别码,能区别不同的电器设备,防止不同机种遥控码互相干扰,如我们可以同时使用电视机、机顶盒、功放等遥控器,但它们不会产生误触发。该芯片的用户识别码固定为十六进制01H;后16位为8位操作码(功能码)及其反码。UPD6121G最多额128种不同组合的编码。遥控器在按键按下后,周期性地发出同一种32位二进制码,周期约为108ms。一组码本身的持续时间随它包含的二进制“0”和“1”的个数不同而不同,大约在45~63ms之间。
2、按键的编码
当我们按下遥控器的按键时,遥控器将发出如图2的一串二进制代码,我们称它为一帧数据。根据各部分的功能。可将它们分为5部分,分别为引导码、用户识别码、用户识别码反码、数据码、数据反码。遥控器发射代码时.均是低位在前,高位在后。由图3分析可以得到.引导码高电平为4.5ms,低电平为4.5ms,当接收到此码时,表示一帧数据的开始。单片机可以准备接收下面的数据。用户识别码由8位二进制组成,共256种.图中地址码重发了一次,主要是加强遥控器的可靠性.如果两次地址码不相同,则说明本帧数据有错,应丢弃。不同的设备可以拥有不同的用户识别码.因此。同种编码的遥控器只要设置地址码不同,也不会相互干扰。图中的地址码为十六进制的0EH(注意低位在前)。在同一个遥控器中,所有按键发出的地址码都是相同的,数据码为8位,可编码256种状态,代表实际所按下的键。数据反码是数据码的各位求反,通过比较数据码与数据反码,可判断接收到的数据是否正确。如果数据码与数据反码之间的关系不满足相反的关系.则本次遥控接收有误,数据应丢弃。在同一个遥控器上.所有按键的数据码均不相同。在图3中,数据码为十六进制的0CH,数据反码为十六进制的0F3H(注意低位在前),两者之和应为0FFH。
二、单片机遥控接收电路
红外遥控接收可采用较早的红外接收二极管加专用的红外处理电路的方法。如CXA20106,此种方法电路复杂,现在一般不采用。较好的接收方法是用一体化红外接收头,它将红外接收二极管、放大、解调、整形等电路做在一起,只有三个引脚。分别是+5V电源、地、信号输出。常用的一体化接收头的外形及引脚见红外接收头的信号输出接单片机的INTO或INTl脚。典型电路如图5所示。图中增加了一只PNP型三极管对输出信号进行放大。
三、遥控信号的解码算法及程序编制
平时,遥控器无键按下。红外发射二极管不发出信号,遥控接收头输出信号1,有键按下时,0和1编码的高电平经遥控头倒相后会输出信号0.由于与单片机的中断脚相连,将会引起单片机中断(单片机预先设定为下降沿产生中断)。单片机在中断时使用定时器0或定时器1开始计时.到下一个脉冲到来时,即再次产生中断时,先将计时值取出。清零计时值后再开始计时.通过判断每次中断与上一次中断之间的时间间隔。便可知接收到的是引导码还是0和1。如果计时值为9ms。接收到的是引导码,如果计时值等于1.12ms,接收到的是编码0。如果计时值等于2.25ms.接收到的是编码1。在判断时间时,应考虑一定的误差值。因为不同的遥控器由于晶振参数等原因,发射及接收到的时间也会有很小的误差。
即我们通常所说的解码,单片机得知发过来的是什么信号,然后再做出相应的判断与控制,如我们按电视机遥控器的频道按钮,则单片机会控制更换电视频道,如按的是遥控器音量键,则单片机会控制增减音量。而解码的关键是如何识别“0”和“1”,从位的定义我们可以发现“0”、“1”均以0.56ms的低电平开始,不同的是高电平的宽度不同,“0”为0.56ms,“1”为1.68ms,所以必须根据高电平的宽度区别“0”和“1”。如果从0.56ms低电平过后,开始延时,0.56ms以后,若读到的电平为低,说明该位为“0”,反之则为“1”,为了可靠起见,延时必须比0.56ms长些,但又不能超过1.12ms,否则如果该位为“0”,读到的已是下一位的高电平,因此取(1.12ms+0.56ms)/2=0.84ms最为可靠,一般取0.84ms左右均可。根据码的格式,应该等待9ms的起始码和4.5ms的结果码完成后才能读码。
以接收TC9012遥控器编码为例,解码方法如下:
(1)设外部中断0(或者1)为下降沿中断,定时器0(或者1)为16位计时器,初始值均为O。
(2)第一次进入遥控中断后,开始计时。
(3)从第二次进入遥控中断起,先停止计时,并将计时值保存后,再重新计时。如果计时值等于前导码的时间,设立前导码标志。准备接收下面的一帧遥控数据,如果计时值不等于前导码的时间,但前面已接收到前导码,则判断是遥控数据的0还是1。
(4)继续接收下面的地址码、数据码、数据反码。
(5)当接收到32位数据时,说明一帧数据接收完毕。此时可停止定时器的计时,并判断本次接收是否有效.如果两次地址码相同且等于本系统的地址,数据码与数据反码之和等于0FFH,则接收的本帧数据码有效。否则丢弃本次接收到的数据。
(6)接收完毕,初始化本次接收的数据,准备下一次遥控接收。
转自:奔流聚海


Holtek针对红外线测温应用新推出HT67F5652,整合OPA和24-bit Delta Sigma A/D进行温度量测,可广泛应用在红外线测温需求产品,如耳温枪、额温枪等。

HT67F5652内建低噪声OPA、LCD Driver、LDO、PGA与24-bit Delta Sigma A/D,可以减少产品零件数目及降低成本。在系统资源上,HT67F5652具备8Kx16 Flash Program Memory、512x8 RAM、128x8 True EEPROM、UART及Timer Module。
HT67F5652提供64-pin及80-pin LQFP两种封装型式。
来源: Holtek

作者:张文江/甄兴仁/宋春霞
1.引言
随着红外成像技术的快速发展,红外测量电视成为光电跟踪系统的重要组成部分。红外相机的自动和连续调焦,是保证红外电视成像质量,实现光电跟踪系统高精度稳定跟踪的关键技术。一般来说,影响红外电视成像的因素有很多,而目标的距离和环境温度等参数对成像质量影响较大,如何根据目标距离和环境温度等影响目标成像质量的信息,实时调整相机的位置,从而获得清晰的目标图像,需要进行广泛深入的研究,对实现红外跟踪测量系统稳定高精度跟踪测量功能具有重要意义。
2.调焦控制器的硬件设计
2.1 总体结构及原理
光电跟踪测量系统调焦控制系统要实现的功能主要包括:接收综合控制器的控制命令,实现红外电视的变倍与调焦功能,兼具自检功能和故障诊断能力,故障诊断到线路板。
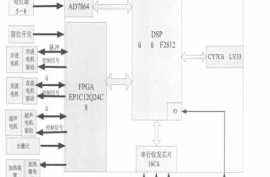
系统采用基于DSP+FPGA的调光调焦控制器。该控制器的硬件原理框图如图1所示。
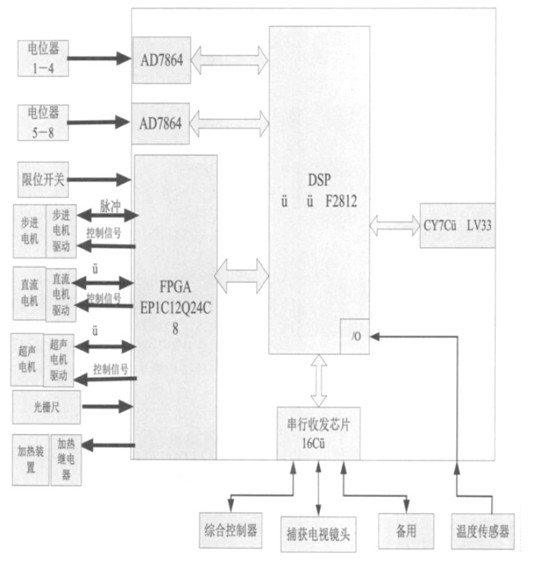
其中DSP(TMS320F2812)作为调光调焦控制器核心。TMS320F2812是TI公司针对数字控制领域而推出的,它是目前控制领域最高性能的处理器,具有控制精度高、速度快、使用灵活以及集成度高等优点,已广泛应用于工业自动化、光学网络以及自动化控制等领域。
系统选用Cyclone公司系列FPGA中的EP1C12Q240C8作为整个调光调焦控制器的时序和逻辑控制核心,EP1C12Q240C8提供12060个逻辑单元(LE)和173个I/O口,可以内嵌4K的RAM.
应用TMS320F2812全部外设接口的一部分,如GPIO接口和EVA/EVB接口。
采用可编程逻辑器件(FPGA),可以非常简单的设计DSP的硬件电路。将DSP的数据总线、地址总线、读写控制线以及中断信号线全部引入到FPGA中,根据特定的要求,在FPGA内完成时序和逻辑设计。其中为TL16C554,AD7864提供地址选通信号,为光栅尺计算提供四倍频鉴相和计数逻辑。
由于电机的信号线、限位开关线数量很多,需要本系统的I/O口的数量较多,可以在FPGA内完成扩展I/O口的功能。
2.2 FPGA的设计
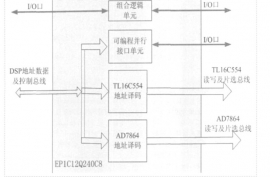
FPGA内部采用模块化的设计思想,对FPGA设计进行模块分解。主要包括,实现FPGA扩展I/O口的功能,为TL16C554和AD7864提供片选和读写信号,提供四倍频鉴相和计数逻辑计算光栅尺位置量。FPGA内的功能模块如图2所示。
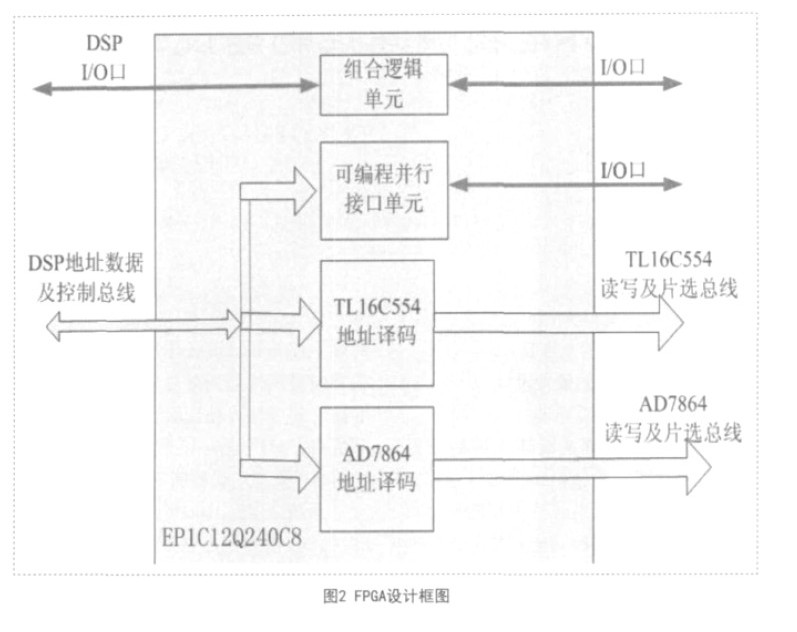
TL16C554地址译码模块:在FPGA内部,针对DSP的读写以及地址信号进行译码,为TL16C554提供读写信号以及片选等信号。
AD7864地址译码模块:对DSP的地址信号进行译码,为AD7864提供读写、片选以及通道选择等信号。
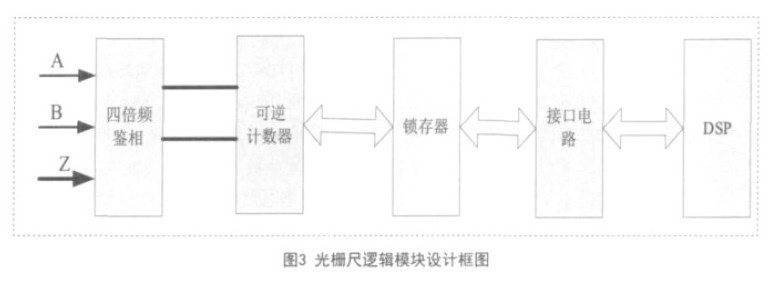
光栅尺逻辑计算模块:光栅尺输出两路正交的方波信号A、B和零位信号Z输入到FPGA中,在FPGA中实现对A、B信号的倍频及鉴相功能,然后通过16位计数器和锁存器与DSP相连,通过读取计数器的数值可得到光栅尺的位置数值,系统框图如图3所示。
3.实验验证与精度分析
3.1 实验验证
调焦系统由安装在望远物镜筒上的光学机械部分和电控部分组成。光学机械部分包括调焦组件、变倍组件等。电控系统以DSP2833为核心处理器,利用FPGA实现时序和逻辑控制,配以外围电路、执行电机及位置反馈部件。电控系统位置反馈采用精密线绕电位器和光栅尺,执行电机采用步进电机、超声电机和永磁直流电机。变倍系统两端靠电限位和机械限位来保证定位。
根据以上设计方案进行实践,调焦电控系统采用两块电路板进行工作,分别为控制电路板和功率驱动板。图4为控制电路板,图5为功率驱动板。通过试验,较好的完成了红外电视自动调焦及变倍功能。
3.2 精度分析
3.2.1 红外电视调焦控制
红外电视调焦范围为200m~∞,调焦执行电机选用海顿直线电机型号为21000系列Size 8直线步进电机,步长为0.0015mm,其工作电压为5V,每相电流为0.24A,在每秒钟1000步的速度下可产生60N的推力。满足使用要求。位置反馈采用增量式光栅尺。
调焦电控系统误差来源是直线步进电机的步长与光栅尺的精度。直线步进电机步长0.0015mm.由以上条件计算得出如下结论:
a)直线步进电机步长为0.0015mm,调焦机构的分辨力为直线步进电机的步长为0.0015mm;b)采用光栅尺作为位置测量传感器,其测量精度高,其测量精度可达5μm,满足±0.01mm的分辨力精度要求;c)每秒钟1000步的速度是电机的常用速度,也就是每秒钟行程为1.5mm,因此该速度满足调焦时间的要求。
3.2.2 红外电视变倍控制红外两档变倍电机选用江苏春生公司的超声电机,型号为TRUM-60.红外变倍系统为100mm/300mm两档变倍,采用半自动控制方式,由电控系统控制超声电机切换变倍镜组,从而切换红外电视的焦距。
超声电机的断电自锁特性保证了旋转变倍机构的稳定性。超声电机断电自锁力矩大于其驱动力矩30%左右。超声电机的旋转轴与变倍镜组的外壳直接连接,这种结构简单可靠,并且占用空间小。
由于超声电机的转速可以达到4~150r/min,对于这种只需要转动90度的变倍机构,如果要求切换时间小于2s,则只要转速n满足:
就可以满足使用要求。因此采用的超声电机完全满足技术要求。
4.结论
光电跟踪测量系统红外电视的调焦控制是该系统能够稳定高精度跟踪目标的关键技术,采用DSP为核心处理器、FPGA为时序和逻辑控制器设计的红外电视调焦控制器,通过实践检验和精度分析,满足了光电跟踪系统根据目标距离、环境温度等参数实时进行焦距调整的技术指标要求。
转自: icbuy.com


一、原理
1、红外发射协议
红外通信的协议有很多种。这个实验使用的是NEC协议。这个协议采用PWM的方法进行调制,利用脉冲宽度来表示 0 和 1 。
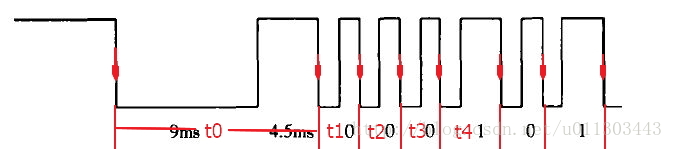
NEC 遥控指令的数据格式为:同步码头、地址码、地址反码、控制码、控制反码。同步码由一个 9ms 的低电平和一个 4.5ms 的高电平组成,地址码、地址反码、控制码、控制反码均是 8 位数据格式。按照低位在前,高位在后的顺序发送。采用反码是为了增加传输的可靠性。因此,每帧的数据为 32 位,包括地址码,地址反码,控制码,控制反码。反码可用于解码时进行校验比对。
NEC码的位定义:一个脉冲对应 560us 的连续载波,一个逻辑 1 传输需要 2.25ms(560us 脉冲+1680us 低电平),一个逻辑 0 的传输需要 1.125ms(560us 脉冲+560us 低电平)。而遥控接收头在收到脉冲的时候为低电平,在没有脉冲的时候为高电平,这样,在接收头端收到的信号为:逻辑 1 应该是 560us 低+1680us 高,逻辑 0 应该是 560us 低+560us 高。
红外数据的波形如下图:包括一个同步头和 32 帧数据。
下图可看出,同步头为 9ms 低电平加上 4.5ms 高电平,控制码为 8 个 0,控制反码为 8 个 1。
2、定时器计数
定时器就是按照一个特定的频率对计数值进行加一或减一操作,当数值溢出时则产生一个标志或中断。这里是用定时器计数产生一个周期性的中断。
3、实现方法
利用定时器记录两个下降沿之间的时间,通过该时间判断是否是同步头信息、数据 1 或者数据 0。当检测到同步头,开始记录 32 个数据的时间值。
二、实现
1、配置 GPIO 口下降沿触发中断
示例代码中使用 PA7 管脚,配置为上拉输入模式。
选择下降沿触发,是因为红外接收管默认情况下保持高电平,接收到数据时从高电平转变为低电平。
中断源选择为 EXTI_Line7 ,在库函数中对该中断源定义的服务函数为 EXTI9_5_IRQHandler(),也就是说外部中断 5 到 9 是 共用一个中断服务函数的。
配置代码如下:
void IR_Pin_init()
{
GPIO_InitTypeDef GPIO_InitStructure;
EXTI_InitTypeDef EXTI_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA|RCC_APB2Periph_AFIO,ENABLE);
GPIO_InitStructure.GPIO_Pin=GPIO_Pin_7;
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_IPU;
GPIO_Init(GPIOA,&GPIO_InitStructure);
EXTI_ClearITPendingBit(EXTI_Line7);
GPIO_EXTILineConfig(GPIO_PortSourceGPIOA, GPIO_PinSource7);
EXTI_InitStructure.EXTI_Line=EXTI_Line7;
EXTI_InitStructure.EXTI_Mode=EXTI_Mode_Interrupt;
EXTI_InitStructure.EXTI_Trigger=EXTI_Trigger_Falling;
EXTI_InitStructure.EXTI_LineCmd=ENABLE;
EXTI_Init(&EXTI_InitStructure);
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_1);
NVIC_InitStructure.NVIC_IRQChannel = EXTI9_5_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
}2、配置定时器计数值
定时器使用的是 TIM2 通用定时器,模式为向上计数。在该模式中,计数器从 0 计数到自动加载值 (TIMx_ARR计数器的内容) ,然后重新从 0 开始计数并且产生一个计数器溢出事件。
示例函数接收两个参数,分别为预分频器的值和自动加载值。通过调整这两个参数,可以灵活地改变定时器的计数周期。例如在 TIM2 的默认时钟源 PCLK1 为96MHz时,使用语句 Tim2_UPCount_Init(SystemCoreClock/1000000-1,100-1); //0.1ms 进行初始化,可以每 0.1ms 产生一次中断。
示例代码如下:
void Tim2_UPCount_Init(u16 Prescaler,u16 Period)
{
TIM_TimeBaseInitTypeDef TIM_StructInit;
NVIC_InitTypeDef NVIC_StructInit;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE);
TIM_StructInit.TIM_Period=Period;
TIM_StructInit.TIM_Prescaler=Prescaler;
TIM_StructInit.TIM_ClockDivision=TIM_CKD_DIV1;
TIM_StructInit.TIM_CounterMode=TIM_CounterMode_Up;
TIM_StructInit.TIM_RepetitionCounter=0;
TIM_TimeBaseInit(TIM2, &TIM_StructInit);
TIM_ITConfig(TIM2, TIM_IT_Update, ENABLE);
TIM_Cmd(TIM2, ENABLE);
TIM_ClearFlag(TIM2, TIM_FLAG_Update);
NVIC_StructInit.NVIC_IRQChannel=TIM2_IRQn;
NVIC_StructInit.NVIC_IRQChannelCmd=ENABLE;
NVIC_StructInit.NVIC_IRQChannelPreemptionPriority=0;
NVIC_StructInit.NVIC_IRQChannelSubPriority=1;
NVIC_Init(&NVIC_StructInit);
}3、定时器中断函数统计时间
如上所说,定时器每 0.1ms 计数完成,产生中断,在中断函数中对标志位 ucTim2Flag 加 1,意味着时间过去了 0.1ms。
时间标志位原型为 uint16_t ucTim2Flag; 。
示例代码如下:
void TIM2_IRQHandler(void)
{
TIM_ClearITPendingBit(TIM2, TIM_IT_Update);
ucTim2Flag++;
}
4、GPIO 中断函数中接收 32 位数据
在下降沿触发的 IO 口中断函数中,需要实现统计两个下降沿之间的时间,并将其记录在数组中。
下降沿第一次触发时,清除当前定时器中的计数值,以便统计时间。之后每一次下降沿触发就记录下当前计数值,然后再对其清零。如果该时间在同步头的时间区间内,对索引进行清零,表示重新开始接收数据。
完整接收同步头和 32 个数据之后,表示接收完成。
示例代码如下:
uint8_t irdata[33]; //用于记录两个下降沿之间的时间
bool receiveComplete; //接收完成标志位
uint8_t idx; //用于索引接收到的数值
bool startflag; //表示开始接收
void EXTI9_5_IRQHandler(void)
{
uint16_t ir_time;
if(startflag)
{
ir_time = ucTim2Flag;
if(ucTim2Flag < 150 && ucTim2Flag >= 50 ) // 接收到同步头
{
idx=0; // 数组下标清零
}
irdata[idx] = ucTim2Flag; // 获取计数时间
ucTim2Flag = 0; // 清零计数时间,以便下次统计
idx++; // 接收到一个数据,索引加1
if(idx==33) // 如果接收到33个数据,包括32位数和以一个同步头
{
idx=0;
ucTim2Flag = 0;
receiveComplete = TRUE;
}
}
else // 下降沿第一次触发
{
idx = 0;
ucTim2Flag = 0;
startflag = TRUE;
}
EXTI_ClearITPendingBit(EXTI_Line7); // 清除中断标志
}5、判断控制码值
由于中断函数中接收并记录下的数据是两个下降沿之间的时间,并不是红外所发送的数据。因此需要根据红外协议,对 32 个时间进行判断,从而获得红外真正发送的数据。
下面这个函数需要在红外完整接收数据后执行,可通过判断接收完成标志位 receiveComplete 来实现。
示例代码如下:
uint8_t Ir_Server()
{
uint8_t i,j,idx=1; //idx 从1 开始表示对同步头的时间不处理
uint8_t temp;
for(i=0; i < 4; i++)
{
for(j=0; j < 8; j++)
{
if(irdata[idx] > =8 && irdata[idx] < 15) //表示 0
{
temp = 0;
}
else if(irdata[idx] > =18 && irdata[idx] < 25) //表示 1
{
temp = 1;
}
remote_code[i] << = 1;
remote_code[i] |= temp;
idx++;
}
}
return remote_code[2]; // 该数组中记录的是控制码,每个按键不一样
//for(idx=0; idx < 4; idx++)
//{
// printf("remote_code[%d] = %#x\n",idx,remote_code[idx]);
//}
}6、主函数
在 main 函数中,对 IO 口和 定时器进行初始化。
主循环中,通过判断接收完成标志位,对接收完成的按键控制码进行打印。
示例代码如下:
void main()
{
...
IR_Pin_init();
Tim2_UPCount_Init(SystemCoreClock/1000000-1,100-1);
while(1)
{
if(repeatEnable)
{
repeatEnable = FALSE;
Ir_Server();
printf("key_code = %#x\n",remote_code[2]);
}
}
}三、演示
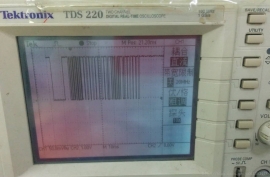
如下图为串口打印出接收的红外按键值信息:

说明1:这只是实现红外接收的其中一种方法,网上还有一种比较常见的方法是利用下降沿触发,在中断中进行延迟,判断高电平持续时间以此来判断信号类别。个人感觉这不是一种很好的方法,因为在中断中进行延时会导致主函数得不到及时的处理。
说明2:在调试时,不要在中断处理中加入过多无关语句,例如打印语句,这会导致结果出错。
本文档基于 STM32 F1 系列 MCU,固件库版本 3.5。其他 MCU 及固件库仅需要对库函数略作修改。
作者: cyang
转自: cyang's blog