在现代电子产品中,自动控制系统,电子仪器设备、家用电器、电子玩具等等方面,直流电机都得到了广泛的应用。大家熟悉的录音机、电唱机、录相机、电子计算机等,都不能缺少直流电机。所以直流电机的控制是一门很实用的技术。
直流电机分类
直流电机,大体上可分为四类:
第一类为有几相绕组的步进电机。这些步进电机,外加适当的序列脉冲,可使主轴转动一个精密的角度(通常在1.8°--7.5°之间)。只要施加合适的脉冲序列,电机可以按照人们的预定的速度或方向进行连续的转动。
步进电机用微处理器或专用步进电机驱动集成电路,很容易实现控制。例如常用的SAAl027或SAAl024专用步进电机控制电路。
步进电机广泛用于需要角度转动精确计量的地方。例如:机器人手臂的运动,高级字轮的字符选择,计算机驱动器的磁头控制,打印机的字头控制等,都要用到步进电机。
第二类为永磁式换流器直流电机,它的设计很简单,但使用极为广泛。当外加额定直流电压时,转速几乎相等。这类电机用于录音机、录相机、唱机或激光唱机等固定转速的机器或设备中。也用于变速范围很宽的驱动装置,例如:小型电钻、模型火车、电子玩具等。在这些应用中,它借助于电子控制电路的作用,使电机功能大大加强。
第三类是所谓的伺服电机,伺服电机是自动装置中的执行元件,它的最大特点是可控。在有控制信号时,伺服电机就转动,且转速大小正比于控制电压的大小,除去控制信号电压后,伺服电机就立即停止转动。伺服电机应用甚广,几乎所有的自动控制系统中都需要用到。例如测速电机,它的输出正比于电机的速度;或者齿轮盒驱动电位器机构,它的输出正比于电位器移动的位置.当这类电机与适当的功率控制反馈环配合时,它的速度可以与外部振荡器频率精确锁定,或与外部位移控制旋钮进行锁定。
唱机或激光唱机的转盘常用伺服电机。天线转动系统,遥控模型飞机和舰船也都要用到伺服电机。
最后一类为两相低电压交流电机。这类电机通常是直流电源供给一个低频振荡器,然后再用低频低压的交流去驱动电机。这类电机偶尔也用在转盘驱动机构中。
电机工作原理
1. 步进电机的基本工作原理
步进电机有两种基本的形式:可变磁阻型和混和型。步进电机的基本工作原理,结合图1的结构示意图进行叙述。
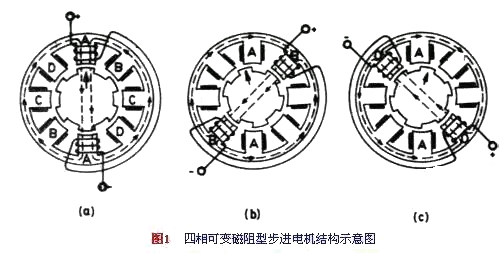
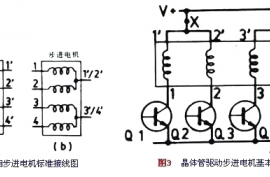
图1是一种四相可变磁阻型的步进电机结构示意图。这种电机定子上有八个凸齿,每一个齿上有一个线圈。线圈绕组的连接方式,是对称齿上的两个线圈进行反相连接,如图中所示。八个齿构成四对,所以称为四相步进电机。
它的工作过程是这样的:当有一相绕组被激励时,磁通从正相齿,经过软铁芯的转子,并以最短的路径流向负相齿,而其他六个凸齿并无磁通。为使磁通路径最短,在磁场力的作用下,转子被强迫移动,使最近的一对齿与被激励的一相对准。在图1(a)中A相是被激励,转子上大箭头所指向的那个齿,与正向的A齿对准。从这个位置再对B相进行激励,如图1中的(b),转子向反时针转过15°。若是D相被激励,如图1中的(c),则转子为顺时针转过15°。下一步是C 相被激励。因为C相有两种可能性:A—B—C—D或A—D—C—B。一种为反时针转动;另一种为顺时针转动。但每步都使转子转动15°。电机步长(步距角)是步进电机的主要性能指标之一,不同的应用场合,对步长大小的要求不同。改变控制绕组数(相数)或极数(转子齿数),可以改变步长的大小。它们之间的相互关系,可由下式计算:
Lθ=360 P×N
式中:Lθ为步长;P为相数;N为转子齿数。在图1中,步长为15°,表示电机转一圈需要24步。
2. 混和步进电机的工作原理
在实际应用中,最流行的还是混和型的步进电机。但工作原理与图1所示的可变磁阻型同步电机相同。但结构上稍有不同。例如它的转子嵌有永磁铁。激励磁通平行于X轴。一般来说,这类电机具有四相绕组,有八个独立的引线终端,如图2a所示。或者接成两个三端形式,如图2b所示。每相用双极性晶体管驱动,并且连接的极性要正确。
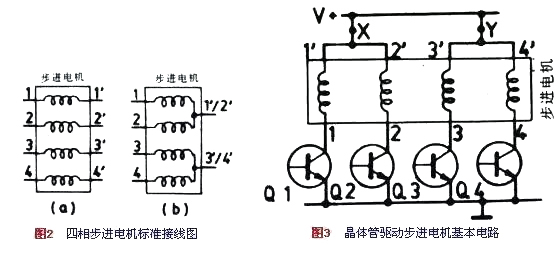
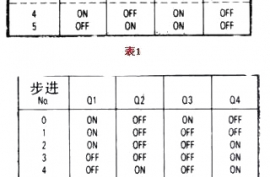
图3所示的电路为四相混和型步进电机晶体管驱动电路的基本方式。它的驱动电压是固定的。表1列出了全部步进开关的逻辑时序。
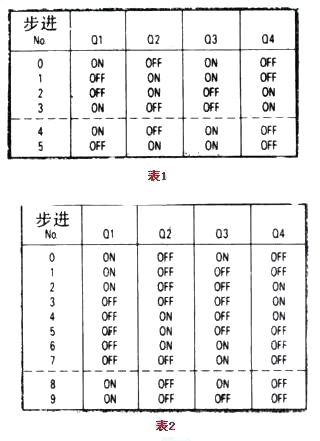
值得注意的是,电机步进为1—2—3—4的顺序。在同一时间,有两相被激励。但是1相和2相,3相和4相绝对不能同时激励。
四相混和型步进电机,有一特点很有用处。它可以用半步方式驱动。就是说,在某一时间,步进角仅前进一半。用单个混合或用双向开关即可实现,这种逻辑时序由表2列出。
四相混和型步进电机,也能工作于比额定电压高的情况。这可以用串联电阻进行降压。因为1相和2相,3相和4相是不会同时工作的,所以每对仅一个降压电阻,串接在图3中的X和Y点之间。因此额定电压为6V的步进电机,就可以工作在12V的电源下。这时需串一个6W、6Ω的电阻。
两相电机驱动器
两相(交流)电机有时用作精密唱机的转盘。它是一种低电压型的同步机构。
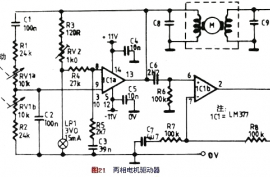
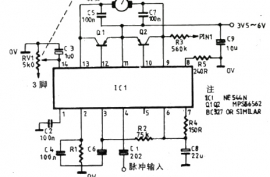
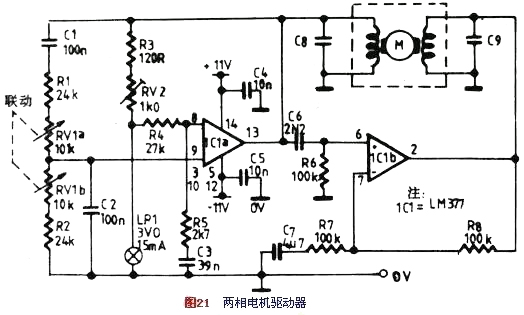
图21为两相电机驱动器电路。这个电路能驱动8欧两相电机。每个绕组可达3瓦。频率在45Hz到65Hz。集成电路选用LM377双路3瓦音频功率放大器作驱动。电源用正负11V。
电路工作原理。集成电路的左半部分接成文氏桥振荡器,频率可调由RV1调节,频率可变范围45Hz—65Hz。振幅调节由RV2控制,灯泡LP1作稳定振幅用。IC1a的输出一路直接馈送电机的一相绕组。集成电路的另一半IC1b是作为85移相器用。C6、R6是85移相器。但是在60HZ时要乘以一个十倍的衰减因子,所以IC1b要乘以十倍的增益。电路稳定性经去耦网络C3—R4—R5,C4和C5保证。电机绕组与C8、C9所组成的谐振回路,调谐到中间频率值(55Hz)。
伺服电机系统
伺服电机是一种传统的电机。它是自动装置的执行元件。伺服电机的最大特点是可控。在有控制信号时,伺服电机就转动,且转速大小正比于控制电压的大小。去掉控制电压后,伺服电机就立即停止转动。伺服电机的应用甚广,几乎所有的自动控制系统都需要用到。在家电产品中,例如录相机、激光唱机等都是不可缺少的重要组成部分。
1.简单伺服电机的工作原理
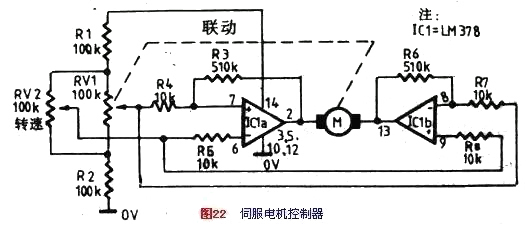
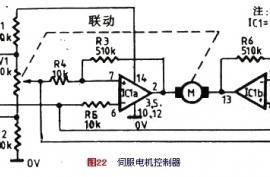
图22示出了伺服电机的最简单的应用。电位器RV1由伺服电机带动。电机可选用电流不超过700mA,电压为12~24V的任一种伺服电机。图中RV1 和RV2是接成惠斯登(Wheatstone)电桥。集成电路LM378是双路4瓦功率放大器,也以桥接方式构成电机驱动差分放大器。
当RV2的任意变化,都将破坏电桥的平衡,使RV1—RV2之间产生一差分电压,并且加以放大后送至电机。电机将转动,拖动电位器RV1到新的位置,使电桥重新达到新的平衡。所以说,RV1是跟踪了RV2的运动。
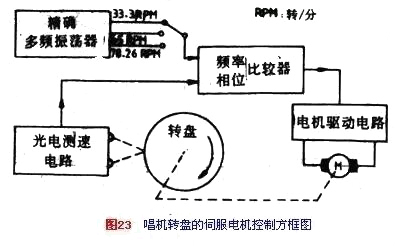
图23是用方块图形式,画出了测速传感器伺服电机系统,能用作唱机转盘精密速度控制的原理图。电机用传统的皮带机构驱动转盘。转盘的边缘,用等间隔反射条文图形结构。用光电测速计进行监视和检测。光电测速计的输出信号正比于转盘的转速。把光电测速计输出信号的相位和频率,与标准振荡器的相位和频率进行比较,用它的误差信号控制电机驱动电路。因此,转盘的转速就精确地保持在额定转速上。额定转速的换档,可由操作开关控制。这些控制电路,已有厂家做成专用的集成电路。
2.数字比例伺服电机
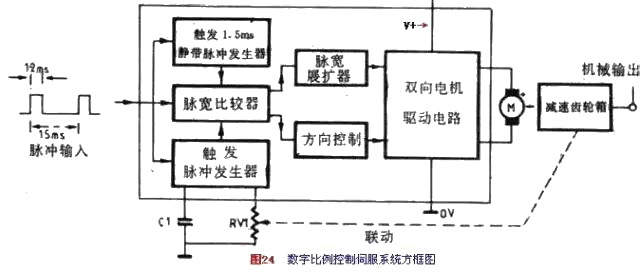
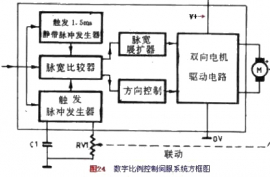
伺服电机的最好类型之一,是用数字比例遥控系统。实际上这些装置是由三部份组成:采用集成电路、伺服电机、减速齿轮盒电位器机构。图24是这种系统的方块图。电路的驱动输入,是用周期为15ms而脉冲宽度为1~2ms的脉冲信号驱动。输入脉冲的宽度,控制伺服机械输出的位置。例如:1ms脉宽,位置在最左边;1.5ms在中是位置,2ms在最右边的位置。
每一个输入脉冲分三路同时传送。一路触发1.5ms脉宽的固定脉冲发生器。一路输入触发脉冲发生器,第三路送入脉宽比较电路。用齿轮盒输出至RV1,控制可变宽度的脉冲发生器。这三种脉冲同时送到脉宽比较器后,一路确定电机驱动电路的方向。另一路送给脉宽扩展器,以控制伺服电机的速度,使得RV1迅速驱动机械位置输出跟随输入脉宽的任何变化。
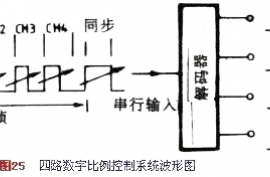
上述伺服电机型常用于多路遥控系统。图25示出了四路数字比例控制系统的波形图。
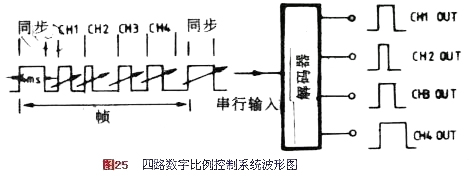
从图中可以看出是串行数据输入,经过译码器分出各路的控制信号。每一帧包含4ms的同步脉冲,紧接在后面的是四路可变宽度(1~2ms)顺序的“路”脉冲。译码器将四路脉冲变换为并行形式,就能用于控制伺服电机。
3.数字伺服电机电路
数字伺服电机控制单元,可以买到现成的集成电路。例如ZN409CE或NE544N型伺服电机放大器集成电路。图26和图27示出了这两种集成电路的典型应用。
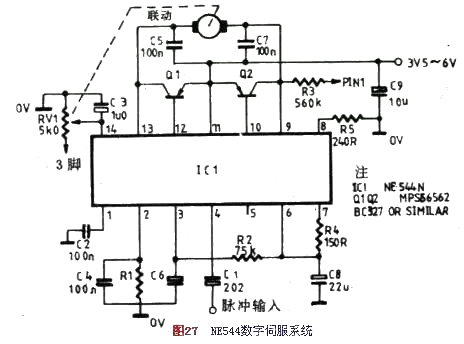
图中元件值适用于输入脉冲宽度为1~2ms,帧脉冲宽度大约为18ms的情况。
图28是适用上述伺服电机型的通用测试电路。伺服电源电池通常为5V。输入脉冲经标准的伺服插座送到伺服电路。帧脉冲的宽度为13—28ms;用RV1调节控制。RV2调节控制脉冲宽度在1—2ms之间。用RV4微调中间值为1.5ms.输出电平由RV3进行调节。
两个集成电路为时基电路CMOS7555型,电源电压可以低到3V仍然工作。IC1为无稳多谐振荡器,产生帧时间脉冲,它的输出触发IC2。而IC2是一个单稳电路,产生输出测试脉冲。
步进电机的控制电路
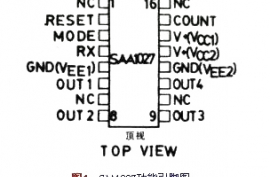
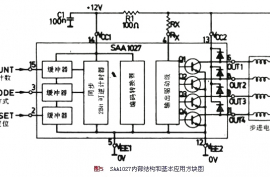
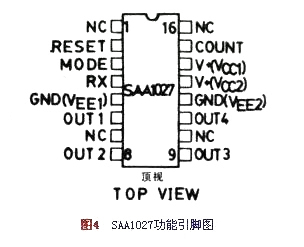
四相步进电机可用几种专用的集成电路驱动器,SAAl027是其中常用的一种,它的特点是工作电压范围宽9.5V~18V;输出驱动电流大,可达500mA。它适合作四相全步步进电机的控制。图4是SAAl027的外形和引脚功能图。图5(下面↓)是它的内部原理方块图及基本应用。
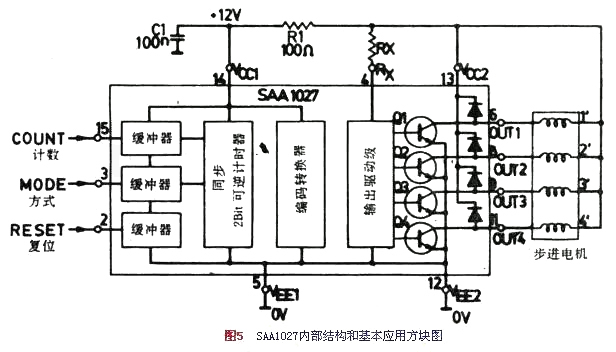
实际上,集成电路有三路缓冲输入,每一个缓冲输入都控制一个二位(四状态)的同步可逆计数器。它的输出送到一个编码变换器。然后用四路输出,去控制输出级的四个晶体管。输出级以集电极开路方式工作。电机的绕组线圈串入集电极。为防止反向电动势损坏晶体管,在绕组的两端并联一反向二极管。
要特别注意的是:集成电路13脚和12脚是流过大电流的引脚。而14脚和5脚流过小电流。在使用时5脚和12脚都要接地。通常正12V直接接到13脚,然后经 R1—C1去耦电路接到14脚。正电压也必须经Rx送到4脚。Rx的作用是决定四个晶体管的最大输出驱动电流的容量。Rx的大小可由下式计算;
Rx=(4E/I)-6
式中E为电源电压,I为所希望的电机最大相电流。当用12V时,Rx值取420Ω、180Ω或78Ω)时,最大输出电流分别为100mA、200mA、或350mA。
SAA1027集成电路有三个输入控制端:计数、方式和复位。复位端通常是高电平。计数器每次从低电平到高电平的跳变,将使集成电路改变状态。全部的工作状态已由表3列出。
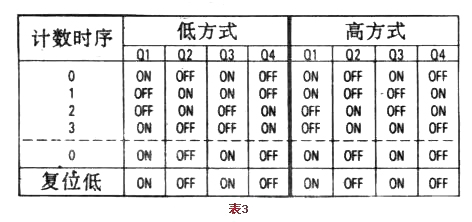
在任何时候,每隔四步时序重复一次。但是复位端为低电平时,可以复位到起始状态。
当方式控制输入端为低电平时,在一个方向上(通常为顺时针转动)顺序重复。反之,方式控制端为高电平时,则在另一个方向上(反时针转动)顺序重复。
图6是SAAl027的驱动和试验电路。
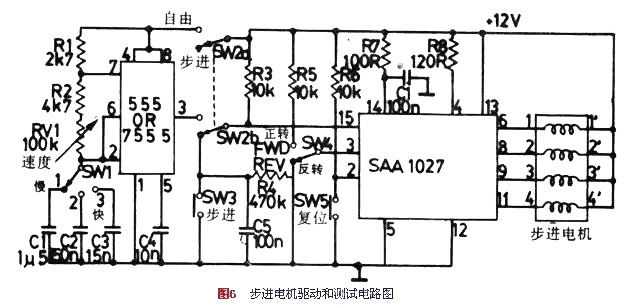
这个电路用于混和型四相步进电机,额定电流可达300mA。电机可用SW3进行手工的单步试验,或者用SW2经555/7555无稳振荡器进行自动步进的试验。SW4可控制电机的方向。SW5用于复位控制试验。
用SW1和RV1电位器,可使无稳电路的工作速度能在很宽的范围内变化。置位1档时为低速控制,频率范围从5Hz—68Hz。SW2在2当和3档时,振荡频率分别为第1档的10倍和100倍。总的速度控制范围从6—8500转/分。
图6是一种基本电路。根据不同的使用场合,还有几种变化。
图7是一种步进电机与微处理器的接口电路。
计算机或微处理器的输出端口,通常终端驱动电压低于1V时,作为逻辑0状态;而高于3.5V时,作为逻辑1状态。这种逻辑称为正逻辑。不过图7中电路与上述相反。因此,步进电机输入端从高电平向低电平转换时,工作状态改变。复位端用高电平复位。方式输入端为低电平时,电机正转;而高电平时,电机反转。
图6电路设计最大输出电流为300mA。
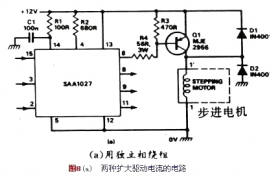
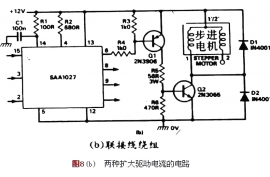
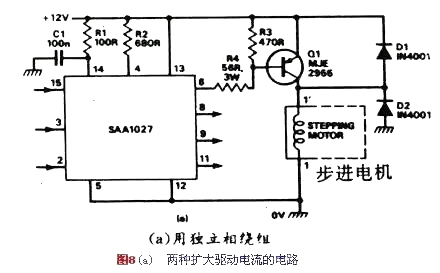
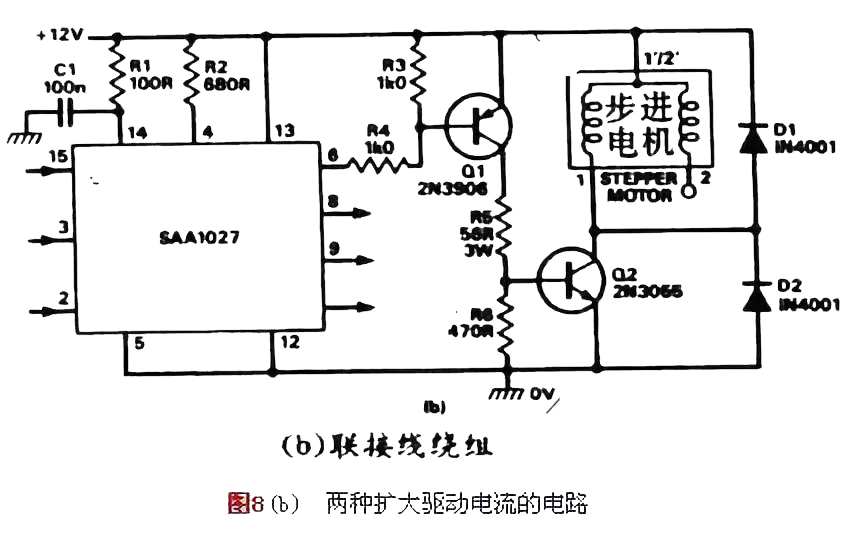
如果希望把电流扩展5A,则采用图8中的两个电路。步进电机的每相都需要外加驱动电路,一个四相步进电机,需要增加四个这样的附加电路。图8(a))的电路用于驱动电路,一个四相步进电机,需要增加四个这样的附加电路。图8(a)的电路用于驱动四个完全独立的绕组。图8(b)的电路用于绕组具有公共点步进电机。D1和D2的作用是防止电机的反电动势损坏输出级晶体管。
文章素材来源于网络 转载自伺服与运动控制