总线



IICvs SPI
现今,在低端数字通信应用领域,我们随处可见IIC (Inter-Integrated Circuit) 和 SPI (Serial Peripheral Interface)的身影。原因是这两种通信协议非常适合近距离低速芯片间通信。Philips(for IIC)和Motorola(for SPI) 出于不同背景和市场需求制定了这两种标准通信协议。
IIC 开发于1982年,当时是为了给电视机内的CPU和外围芯片提供更简易的互联方式。电视机是最早的嵌入式系统之一,而最初的嵌入系统是使用内存映射(memory-mapped I/O)的方式来互联微控制器和外围设备的。要实现内存映射,设备必须并联入微控制器的数据线和地址线,这种方式在连接多个外设时需大量线路和额外地址解码芯片,很不方便并且成本高。
为了节省微控制器的引脚和和额外的逻辑芯片,使印刷电路板更简单,成本更低,位于荷兰的Philips实验室开发了 ‘Inter-Integrated Circuit’,IIC 或 IIC ,一种只使用二根线接连所有外围芯片的总线协议。最初的标准定义总线速度为100kbps。经历几次修订,主要是1995年的400kbps,1998的3.4Mbps。
有迹象表明,SPI总线首次推出是在1979年,Motorola公司将SPI总线集成在他们第一支改自68000微处理器的微控制器芯片上。SPI总线是微控制器四线的外部总线(相对于内部总线)。与IIC不同,SPI没有明文标准,只是一种事实标准,对通信操作的实现只作一般的抽象描述,芯片厂商与驱动开发者通过data sheets和application notes沟通实现上的细节。
SPI
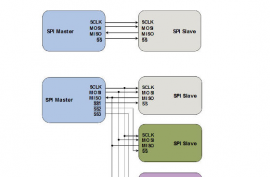
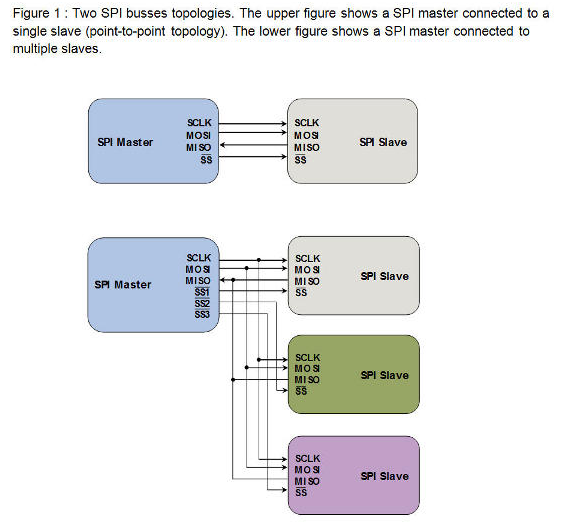
对于有经验的数字电子工程师来说,用SPI互联两支数字设备是相当直观的。SPI是种四根信号线协议(如图):
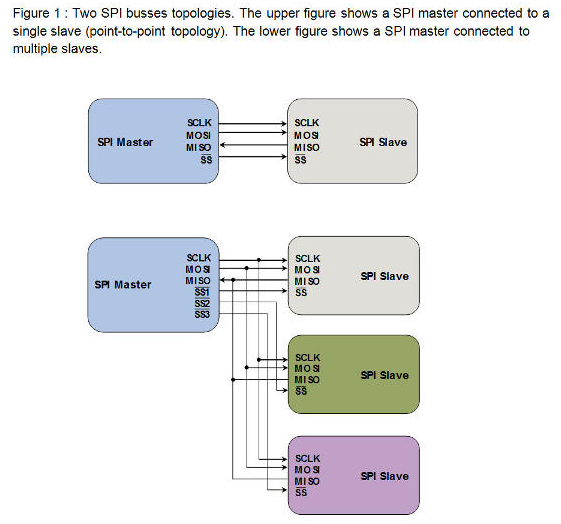
§ SCLK: Serial Clock (output from master);
§ MOSI; SIMO: Master Output, Slave Input(output from master);
§ MISO; SOMI: Master Input, Slave Output(output from slave);
§ SS: Slave Select (active low, outputfrom master).
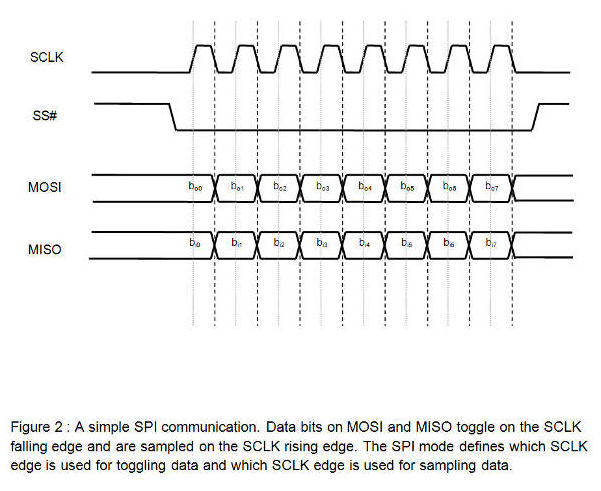
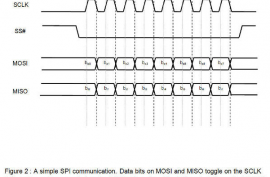
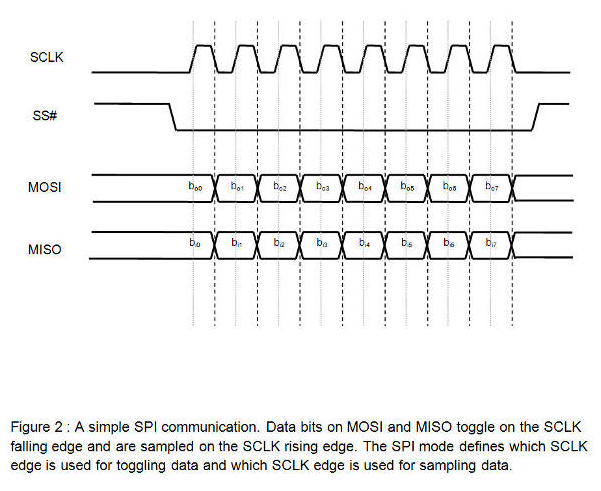
SPI是[单主设备( single-master )]通信协议,这意味着总线中的只有一支中心设备能发起通信。当SPI主设备想读/写[从设备]时,它首先拉低[从设备]对应的SS线(SS是低电平有效),接着开始发送工作脉冲到时钟线上,在相应的脉冲时间上,[主设备]把信号发到MOSI实现“写”,同时可对MISO采样而实现“读”,如下图:
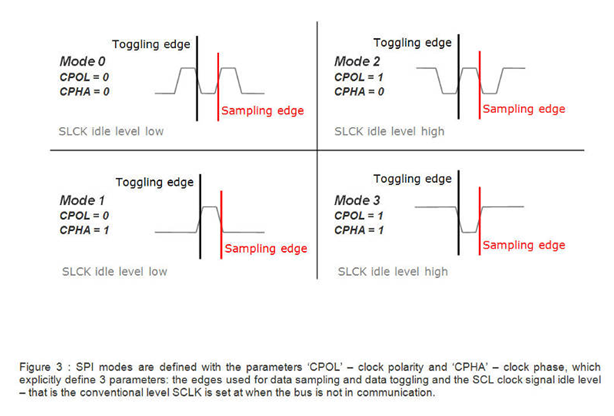
SPI有四种操作模式——模式0、模式1、模式2和模式3,它们的区别是定义了在时钟脉冲的哪条边沿转换(toggles)输出信号,哪条边沿采样输入信号,还有时钟脉冲的稳定电平值(就是时钟信号无效时是高还是低)。每种模式由一对参数刻画,它们称为时钟极(clock polarity)CPOL与时钟期(clock phase)CPHA。
[主从设备]必须使用相同的工作参数——SCLK、CPOL 和 CPHA,才能正常工作。如果有多个[从设备],并且它们使用了不同的工作参数,那么[主设备]必须在读写不同[从设备]间重新配置这些参数。以上SPI总线协议的主要内容。SPI不规定最大传输速率,没有地址方案;SPI也没规定通信应答机制,没有规定流控制规则。事实上,SPI[主设备]甚至并不知道指定的[从设备]是否存在。这些通信控制都得通过SPI协议以外自行实现。例如,要用SPI连接一支[命令-响应控制型]解码芯片,则必须在SPI的基础上实现更高级的通信协议。SPI并不关心物理接口的电气特性,例如信号的标准电压。在最初,大多数SPI应用都是使用间断性时钟脉冲和以字节为单位传输数据的,但现在有很多变种实现了连续性时间脉冲和任意长度的数据帧。
IIC
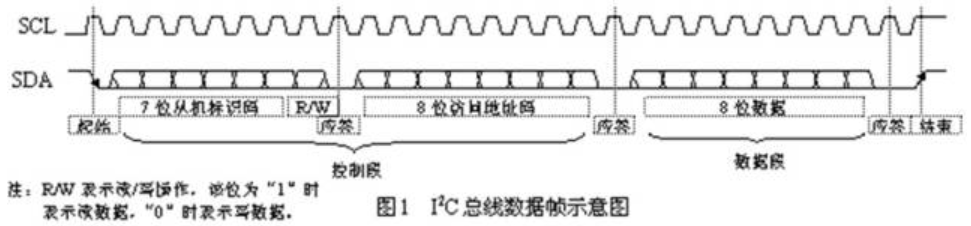
与SPI的单主设备不同,IIC 是多主设备的总线,IIC没有物理的芯片选择信号线,没有仲裁逻辑电路,只使用两条信号线—— ‘serial data’ (SDA) 和 ‘serial clock’ (SCL)。IIC协议规定:
§ 第一,每一支IIC设备都有一个唯一的七位设备地址;
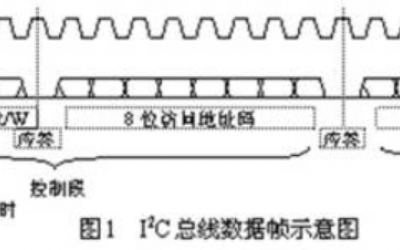
§ 第二,数据帧大小为8位的字节;
§ 第三,数据(帧)中的某些数据位用于控制通信的开始、停止、方向(读写)和应答机制。
IIC 数据传输速率有标准模式(100 kbps)、快速模式(400 kbps)和高速模式(3.4 Mbps),另外一些变种实现了低速模式(10 kbps)和快速+模式(1 Mbps)。
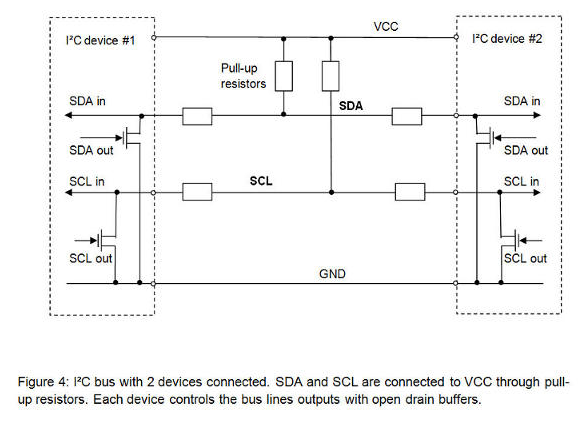
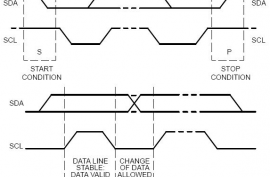
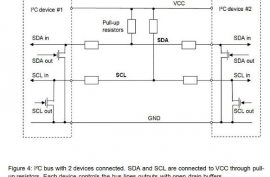
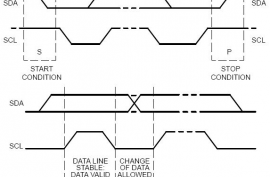
物理实现上,IIC 总线由两根信号线和一根地线组成。两根信号线都是双向传输的,参考下图。IIC协议标准规定发起通信的设备称为主设备,主设备发起一次通信后,其它设备均为从设备。
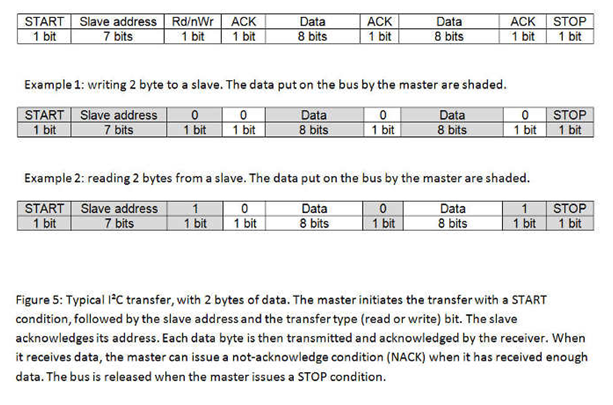
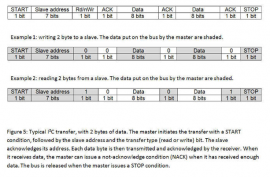
IIC 通信过程大概如下。首先,主设备发一个START信号,这个信号就像对所有其它设备喊:请大家注意!然后其它设备开始监听总线以准备接收数据。接着,主设备发送一个7位设备地址加一位的读写操作的数据帧。当所设备接收数据后,比对地址自己是否目标设备。如果比对不符,设备进入等待状态,等待STOP信号的来临;如果比对相符,设备会发送一个应答信号——ACKNOWLEDGE作回应。
当主设备收到应答后便开始传送或接收数据。数据帧大小为8位,尾随一位的应答信号。主设备发送数据,从设备应答;相反主设备接数据,主设备应答。当数据传送完毕,主设备发送一个STOP信号,向其它设备宣告释放总线,其它设备回到初始状态。
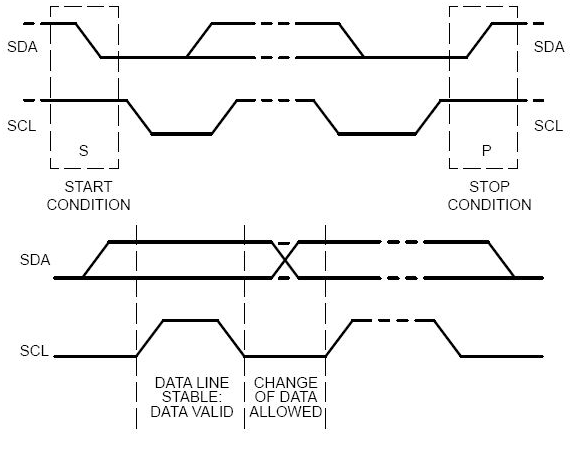
基于IIC总线的物理结构,总线上的START和STOP信号必定是唯一的。另外,IIC总线标准规定SDA线的数据转换必须在SCL线的低电平期,在SCL线的高电平期,SDA线的上数据是稳定的。
在物理实现上,SCL线和SDA线都是漏极开路(open-drain),通过上拉电阻外加一个电压源。当把线路接地时,线路为逻辑0,当释放线路,线路空闲时,线路为逻辑1。基于这些特性,IIC设备对总线的操作仅有“把线路接地”——输出逻辑0。
IIC总线设计只使用了两条线,但相当优雅地实现任意数目设备间无缝通信,堪称完美。我们设想一下,如果有两支设备同时向SCL线和SDA线发送信息会出现什么情况。
基于IIC总线的设计,线路上不可能出现电平冲突现象。如果一支设备发送逻辑0,其它发送逻辑1,那么线路看到的只有逻辑0。也就是说,如果出现电平冲突,发送逻辑0的始终是“赢家”。
总线的物理结构亦允许主设备在往总线写数据的同时读取数据。这样,任何设备都可以检测冲突的发生。当两支主设备竞争总线的时候,“赢家”并不知道竞争的发生,只有“输家”发现了冲突——当它写一个逻辑1,却读到0时——而退出竞争。
10位设备地址
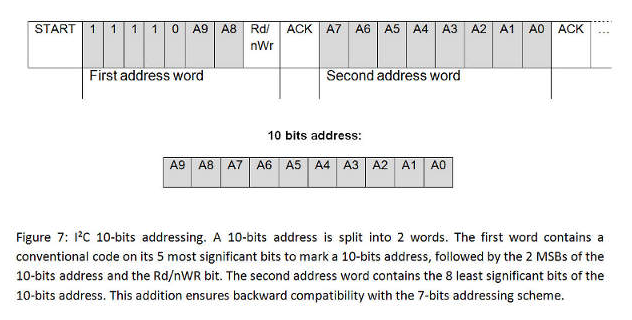
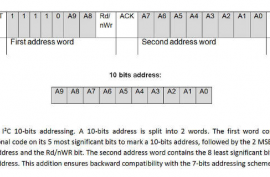
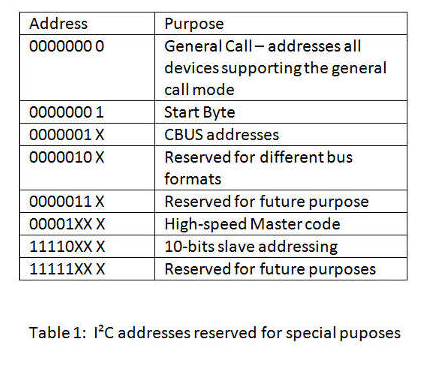
任何IIC设备都有一个7位地址,理论上,现实中只能有127种不同的IIC设备。实际上,已有IIC的设备种类远远多于这个限制,在一条总线上出现相同的地址的IIC设备的概率相当高。为了突破这个限制,很多设备使用了双重地址——7位地址加引脚地址(external configuration pins)。IIC 标准也预知了这种限制,提出10位的地址方案。
10位的地址方案对 IIC协议的影响有两点:
§ 第一,地址帧为两个字节长,原来的是一个字节;
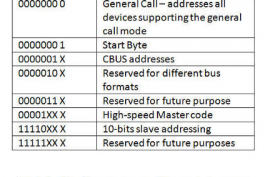
§ 第二,第一个字节前五位最高有效位用作10位地址标识,约定是“11110”。
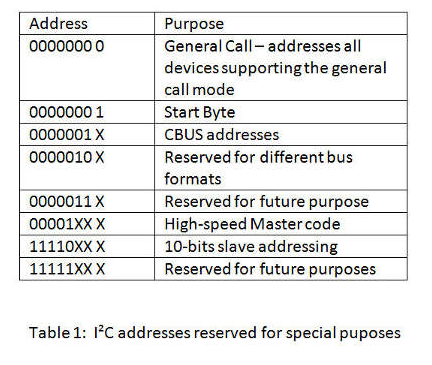
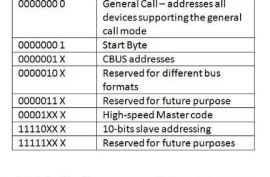
除了10位地址标识,标准还预留了一些地址码用作其它用途,如下表:
时钟拉伸
在 IIC 通信中,主设备决定了时钟速度。因为时钟脉冲信号是由主设备显式发出的。但是,当从设备没办法跟上主设备的速度时,从设备需要一种机制来请求主设备慢一点。这种机制称为时钟拉伸,而基于I²C结构的特殊性,这种机制得到实现。当从设备需要降低传输的速度的时候,它可以按下时钟线,逼迫主设备进入等待状态,直到从设备释放时钟线,通信才继续。
高速模式
原理上讲,使用上拉电阻来设置逻辑1会限制总线的最大传输速度。而速度是限制总线应用的因素之一。这也说明为什么要引入高速模式(3.4 Mbps)。在发起一次高速模式传输前,主设备必须先在低速的模式下(例如快速模式)发出特定的“High Speed Master”信号。为缩短信号的周期和提高总线速度,高速模式必须使用额外的I/O缓冲区。另外,总线仲裁在高速模式下可屏蔽掉。更多的信息请参与总线标准文档。
IIC vs SPI: 哪位是赢家?
我们来对比一下IIC 和 SPI的一些关键点:
第一,总线拓扑结构/信号路由/硬件资源耗费
IIC 只需两根信号线,而标准SPI至少四根信号,如果有多个从设备,信号需要更多。一些SPI变种虽然只使用三根线——SCLK, SS和双向的MISO/MOSI,但SS线还是要和从设备一对一根。另外,如果SPI要实现多主设备结构,总线系统需额外的逻辑和线路。用IIC 构建系统总线唯一的问题是有限的7位地址空间,但这个问题新标准已经解决——使用10位地址。从第一点上看,IIC是明显的大赢家。
第二,数据吞吐/传输速度
如果应用中必须使用高速数据传输,那么SPI是必然的选择。因为SPI是全双工,IIC 的不是。SPI没有定义速度限制,一般的实现通常能达到甚至超过10 Mbps。IIC 最高的速度也就快速+模式(1 Mbps)和高速模式(3.4 Mbps),后面的模式还需要额外的I/O缓冲区,还并不是总是容易实现的。
第三,优雅性
IIC 常被称更优雅于SPI。公正的说,我们更倾向于认为两者同等优雅和健壮。IIC的优雅在于它的特色——用很轻盈的架构实现了多主设备仲裁和设备路由。但是对使用的工程师来讲,理解总线结构更费劲,而且总线的性能不高。
SPI的优点在于它的结构相当的直观简单,容易实现,并且有很好扩展性。SPI的简单性不足称其优雅,因为要用SPI搭建一个有用的通信平台,还需要在SPI之上构建特定的通信协议软件。也就是说要想获得SPI特有而IIC没有的特性——高速性能,工程师们需要付出更多的劳动。另外,这种自定的工作是完全自由的,这也说明为什么SPI没有官方标准。IIC和SPI都对低速设备通信提供了很好的支持,不过,SPI适合数据流应用,而IIC更适合“字节设备”的多主设备应用。
小结
在数字通信协议簇中,IIC和SPI常称为“小”协议,相对Ethernet, USB, SATA, PCI-Express等传输速度达数百上千兆字节每秒的总线。但是,我们不能忘记的是各种总线的用途是什么。“大”协议是用于系统外的整个系统之间通信的,“小”协议是用于系统内各芯片间的通信,没有迹象表明“大”协议有必要取代“小”协议。IIC和SPI的存在和流行体现了“够用就好”的哲学。回应文首,IIC和SPI如此的流行,它是任何一位嵌入式工程师必备的工具。
版权声明:本文为CSDN博主「求佛_ce123」的原创文章,转载此文目的在于传递更多信息,版权归原作者所有。遵循CC 4.0 BY-SA版权协议,转载请附上原文出处链接及本声明。
原文链接:https://blog.csdn.net/ce123_zhouwei/article/details/6878547



任何一个微处理器都要与一定数量的部件和外围设备连接,但如果将各部件和每一种外围设备都分别用一组线路与CPU直接连接,那么连线将会错综复杂,甚至难以实现。为了简化硬件电路设计、简化系统结构,常用一组线路,配置以适当的接口电路,与各部件和外围设备连接,这组共用的连接线路被称为总线。采用总线结构便于部件和设备的扩充,尤其制定了统一的总线标准则容易使不同设备间实现互连。
微机中总线一般有内部总线、系统总线和外部总线。
(1)、内部总线是微机内部各外围芯片与处理器之间的总线,用于芯片一级的互连;
(2)、系统总线是微机中各插件板与系统板之间的总线,用于插件板一级的互连;
(3)、外部总线则是微机和外部设备之间的总线,微机作为一种设备,通过该总线和其他设备进行信息与数据交换,它用于设备
一级的互连。
另外,从广义上说,计算机通信方式可以分为并行通信和串行通信,相应的通信总线被称为并行总线和串行总线。并行通信速度快、实时性好,但由于占用的口线多,不适于小型化产品;而串行通信速率虽低,但在数据通信吞吐量不是很大的微处理电路中则显得更加简易、方便、灵活。串行通信一般可分为异步模式和同步模式。
随着微电子技术和计算机技术的发展,总线技术也在不断地发展和完善,而使计算机总线技术种类繁多,各具特色。
下面仅对微机各类总线中目前比较流行的总线技术分别加以介绍。
一、内部总线
1.I2C总线
I2C(Inter-IC)总线10多年前由Philips公司推出,是近年来在微电子通信控制领域广泛采用的一种新型总线标准。它是同步通信的一种特殊形式,具有接口线少,控制方式简化,器件封装形式小,通信速率较高等优点。在主从通信中,可以有多个I2C总线器件同时接到I2C总线上,通过地址来识别通信对象。
2.SPI总线
串行外围设备接口SPI(serial peripheral interface)总线技术是Motorola公司推出的一种同步串行接口。Motorola公司生产的绝大多数MCU(微控制器)都配有SPI硬件接口,如68系列MCU。SPI总线是一种三线同步总线,因其硬件功能很强,所以,与SPI有关的软件就相当简单,使CPU有更多的时间处理其他事务。
3.SCI总线
串行通信接口SCI(serial communication interface)也是由Motorola公司推出的。它是一种通用异步通信接口UART,与MCS-51的异步通信功能基本相同。
二、系统总线
1.ISA总线
ISA(industrial standard architecture)总线标准是IBM 公司1984年为推出PC/AT机而建立的系统总线标准,所以也叫AT总线。它是对XT总线的扩展,以适应8/16位数据总线要求。它在80286至80486时代应用非常广泛,以至于现在奔腾机中还保留有ISA总线插槽。ISA总线有98只引脚。
2.EISA总线
EISA总线是1988年由Compaq等9家公司联合推出的总线标准。它是在ISA总线的基础上使用双层插座,在原来ISA总线的98条信号线上又增加了98条信号线,也就是在两条ISA信号线之间添加一条EISA信号线。在实用中,EISA总线完全兼容ISA总线信号。
3.VESA总线
VESA(video electronics standard association)总线是 1992年由60家附件卡制造商联合推出的一种局部总线,简称为VL(VESA local bus)总线。它的推出为微机系统总线体系结构的革新奠定了基础。该总线系统考虑到CPU与主存和Cache 的直接相连,通常把这部分总线称为CPU总线或主总线,其他设备通过VL总线与CPU总线相连,所以VL总线被称为局部总线。它定义了32位数据线,且可通过扩展槽扩展到64 位,使用33MHz时钟频率,最大传输率达132MB/s,可与CPU同步工作。是一种高速、高效的局部总线,可支持386SX、386DX、486SX、486DX及奔腾微处理器。
4.PCI总线
PCI(peripheral component interconnect)总线是当前最流行的总线之一,它是由Intel公司推出的一种局部总线。它定义了32位数据总线,且可扩展为64位。PCI总线主板插槽的体积比原ISA总线插槽还小,其功能比VESA、ISA有极大的改善,支持突发读写操作,最大传输速率可达132MB/s,可同时支持多组外围设备。 PCI局部总线不能兼容现有的ISA、EISA、MCA(micro channel architecture)总线,但它不受制于处理器,是基于奔腾等新一代微处理器而发展的总线。
5.Compact PCI
以上所列举的几种系统总线一般都用于商用PC机中,在计算机系统总线中,还有另一大类为适应工业现场环境而设计的系统总线,比如STD总线、 VME总线、PC/104总线等。这里仅介绍当前工业计算机的热门总线之一——Compact PCI。 Compact PCI的意思是“坚实的PCI”,是当今第一个采用无源总线底板结构的PCI系统,是PCI总线的电气和软件标准加欧式卡的工业组装标准,是当今最新的一种工业计算机标准。Compact PCI是在原来PCI总线基础上改造而来,它利用PCI的优点,提供满足工业环境应用要求的高性能核心系统,同时还考虑充分利用传统的总线产品,如ISA、STD、VME或PC/104来扩充系统的I/O和其他功能。
三、外部总线
1.RS-232-C总线
RS-232-C是美国电子工业协会EIA(Electronic Industry Association)制定的一种串行物理接口标准。RS是英文“推荐标准”的缩写,232为标识号,C表示修改次数。RS-232-C总线标准设有25条信号线,包括一个主通道和一个辅助通道,在多数情况下主要使用主通道,对于一般双工通信,仅需几条信号线就可实现,如一条发送线、一条接收线及一条地线。RS-232-C标准规定的数据传输速率为每秒50、75、 100、150、300、600、1200、2400、4800、9600、19200波特。RS-232-C标准规定,驱动器允许有2500pF的电容负载,通信距离将受此电容限制,例如,采用150pF/m的通信电缆时,最大通信距离为15m;若每米电缆的电容量减小,通信距离可以增加。传输距离短的另一原因是RS-232属单端信号传送,存在共地噪声和不能抑制共模干扰等问题,因此一般用于20m以内的通信。
2.RS-485总线
在要求通信距离为几十米到上千米时,广泛采用RS-485 串行总线标准。RS-485采用平衡发送和差分接收,因此具有抑制共模干扰的能力。加上总线收发器具有高灵敏度,能检测低至200mV的电压,故传输信号能在千米以外得到恢复。 RS-485采用半双工工作方式,任何时候只能有一点处于发送状态,因此,发送电路须由使能信号加以控制。RS-485用于多点互连时非常方便,可以省掉许多信号线。应用RS-485可以联网构成分布式系统,其允许最多并联32台驱动器和32台接收器。
3.IEEE-488总线
上述两种外部总线是串行总线,而IEEE-488 总线是并行总线接口标准。IEEE-488总线用来连接系统,如微计算机、数字电压表、数码显示器等设备及其他仪器仪表均可用IEEE-488总线装配起来。它按照位并行、字节串行双向异步方式传输信号,连接方式为总线方式,仪器设备直接并联于总线上而不需中介单元,但总线上最多可连接15台设备。最大传输距离为20米,信号传输速度一般为500KB/s,最大传输速度为1MB/s。
4.USB总线
通用串行总线USB(universal serial bus)是由Intel、 Compaq、Digital、IBM、Microsoft、NEC、Northern Telecom等7家世界著名的计算机和通信公司共同推出的一种新型接口标准。它基于通用连接技术,实现外设的简单快速连接,达到方便用户、降低成本、扩展PC连接外设范围的目的。它可以为外设提供电源,而不像普通的使用串、并口的设备需要单独的供电系统。另外,快速是USB技术的突出特点之一,USB的最高传输率可达12Mbps比串口快100倍,比并口快近10倍,而且USB还能支持多媒体。
5.IEEE1394
Apple公司的FireWire基础上由IEEE制定的标准。与USB有很大的相似性。采用树形或菊花链结构,以级连方式在一个接口上最多可连接63个不同种类的设备。传输速率高,最高可达3.2Gb/s; 实时性好,总线提供电源,系统中各设备之间的关系是平等的,连接方便,允许热插拔和即插即用。
转自:嵌入式ARM
IICvs SPI
现今,在低端数字通信应用领域,我们随处可见IIC (Inter-Integrated Circuit) 和 SPI (Serial Peripheral Interface)的身影。原因是这两种通信协议非常适合近距离低速芯片间通信。Philips(for IIC)和Motorola(for SPI) 出于不同背景和市场需求制定了这两种标准通信协议。
IIC 开发于1982年,当时是为了给电视机内的CPU和外围芯片提供更简易的互联方式。电视机是最早的嵌入式系统之一,而最初的嵌入系统是使用内存映射(memory-mapped I/O)的方式来互联微控制器和外围设备的。要实现内存映射,设备必须并联入微控制器的数据线和地址线,这种方式在连接多个外设时需大量线路和额外地址解码芯片,很不方便并且成本高。
为了节省微控制器的引脚和和额外的逻辑芯片,使印刷电路板更简单,成本更低,位于荷兰的Philips实验室开发了 ‘Inter-Integrated Circuit’,IIC 或 IIC ,一种只使用二根线接连所有外围芯片的总线协议。最初的标准定义总线速度为100kbps。经历几次修订,主要是1995年的400kbps,1998的3.4Mbps。
有迹象表明,SPI总线首次推出是在1979年,Motorola公司将SPI总线集成在他们第一支改自68000微处理器的微控制器芯片上。SPI总线是微控制器四线的外部总线(相对于内部总线)。与IIC不同,SPI没有明文标准,只是一种事实标准,对通信操作的实现只作一般的抽象描述,芯片厂商与驱动开发者通过data sheets和application notes沟通实现上的细节。
SPI
对于有经验的数字电子工程师来说,用SPI互联两支数字设备是相当直观的。SPI是种四根信号线协议(如图):
§ SCLK: Serial Clock (output from master);
§ MOSI; SIMO: Master Output, Slave Input(output from master);
§ MISO; SOMI: Master Input, Slave Output(output from slave);
§ SS: Slave Select (active low, outputfrom master).
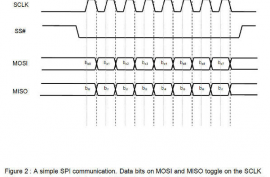
SPI是[单主设备( single-master )]通信协议,这意味着总线中的只有一支中心设备能发起通信。当SPI主设备想读/写[从设备]时,它首先拉低[从设备]对应的SS线(SS是低电平有效),接着开始发送工作脉冲到时钟线上,在相应的脉冲时间上,[主设备]把信号发到MOSI实现“写”,同时可对MISO采样而实现“读”,如下图:
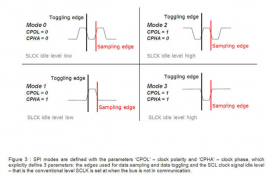
SPI有四种操作模式——模式0、模式1、模式2和模式3,它们的区别是定义了在时钟脉冲的哪条边沿转换(toggles)输出信号,哪条边沿采样输入信号,还有时钟脉冲的稳定电平值(就是时钟信号无效时是高还是低)。每种模式由一对参数刻画,它们称为时钟极(clock polarity)CPOL与时钟期(clock phase)CPHA。
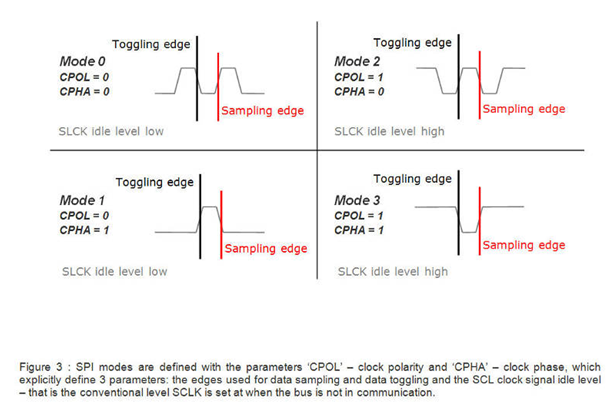
[主从设备]必须使用相同的工作参数——SCLK、CPOL 和 CPHA,才能正常工作。如果有多个[从设备],并且它们使用了不同的工作参数,那么[主设备]必须在读写不同[从设备]间重新配置这些参数。以上SPI总线协议的主要内容。SPI不规定最大传输速率,没有地址方案;SPI也没规定通信应答机制,没有规定流控制规则。事实上,SPI[主设备]甚至并不知道指定的[从设备]是否存在。这些通信控制都得通过SPI协议以外自行实现。例如,要用SPI连接一支[命令-响应控制型]解码芯片,则必须在SPI的基础上实现更高级的通信协议。SPI并不关心物理接口的电气特性,例如信号的标准电压。在最初,大多数SPI应用都是使用间断性时钟脉冲和以字节为单位传输数据的,但现在有很多变种实现了连续性时间脉冲和任意长度的数据帧。
IIC
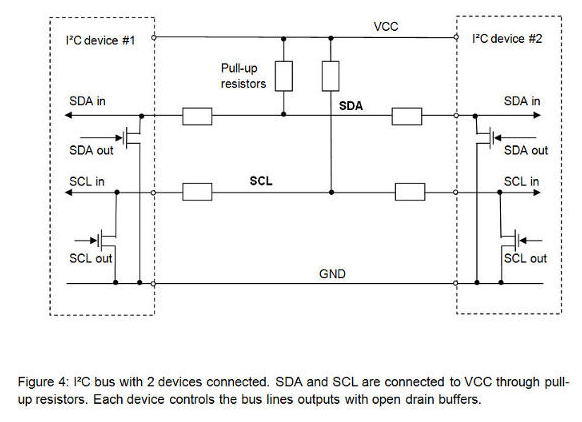
与SPI的单主设备不同,IIC 是多主设备的总线,IIC没有物理的芯片选择信号线,没有仲裁逻辑电路,只使用两条信号线—— ‘serial data’ (SDA) 和 ‘serial clock’ (SCL)。IIC协议规定:
§ 第一,每一支IIC设备都有一个唯一的七位设备地址;
§ 第二,数据帧大小为8位的字节;
§ 第三,数据(帧)中的某些数据位用于控制通信的开始、停止、方向(读写)和应答机制。
IIC 数据传输速率有标准模式(100 kbps)、快速模式(400 kbps)和高速模式(3.4 Mbps),另外一些变种实现了低速模式(10 kbps)和快速+模式(1 Mbps)。
物理实现上,IIC 总线由两根信号线和一根地线组成。两根信号线都是双向传输的,参考下图。IIC协议标准规定发起通信的设备称为主设备,主设备发起一次通信后,其它设备均为从设备。
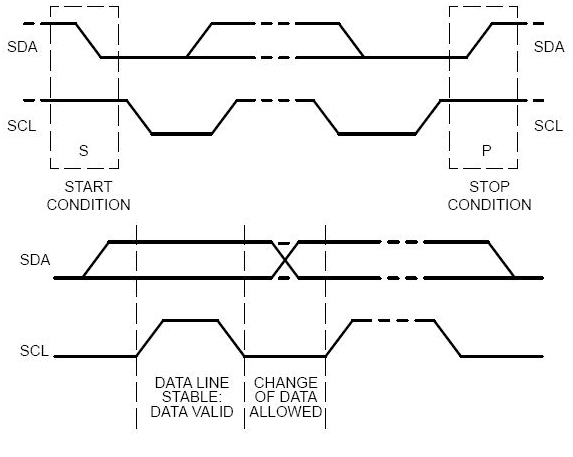
IIC 通信过程大概如下。首先,主设备发一个START信号,这个信号就像对所有其它设备喊:请大家注意!然后其它设备开始监听总线以准备接收数据。接着,主设备发送一个7位设备地址加一位的读写操作的数据帧。当所设备接收数据后,比对地址自己是否目标设备。如果比对不符,设备进入等待状态,等待STOP信号的来临;如果比对相符,设备会发送一个应答信号——ACKNOWLEDGE作回应。
当主设备收到应答后便开始传送或接收数据。数据帧大小为8位,尾随一位的应答信号。主设备发送数据,从设备应答;相反主设备接数据,主设备应答。当数据传送完毕,主设备发送一个STOP信号,向其它设备宣告释放总线,其它设备回到初始状态。

基于IIC总线的物理结构,总线上的START和STOP信号必定是唯一的。另外,IIC总线标准规定SDA线的数据转换必须在SCL线的低电平期,在SCL线的高电平期,SDA线的上数据是稳定的。
在物理实现上,SCL线和SDA线都是漏极开路(open-drain),通过上拉电阻外加一个电压源。当把线路接地时,线路为逻辑0,当释放线路,线路空闲时,线路为逻辑1。基于这些特性,IIC设备对总线的操作仅有“把线路接地”——输出逻辑0。
IIC总线设计只使用了两条线,但相当优雅地实现任意数目设备间无缝通信,堪称完美。我们设想一下,如果有两支设备同时向SCL线和SDA线发送信息会出现什么情况。
基于IIC总线的设计,线路上不可能出现电平冲突现象。如果一支设备发送逻辑0,其它发送逻辑1,那么线路看到的只有逻辑0。也就是说,如果出现电平冲突,发送逻辑0的始终是“赢家”。
总线的物理结构亦允许主设备在往总线写数据的同时读取数据。这样,任何设备都可以检测冲突的发生。当两支主设备竞争总线的时候,“赢家”并不知道竞争的发生,只有“输家”发现了冲突——当它写一个逻辑1,却读到0时——而退出竞争。
10位设备地址
任何IIC设备都有一个7位地址,理论上,现实中只能有127种不同的IIC设备。实际上,已有IIC的设备种类远远多于这个限制,在一条总线上出现相同的地址的IIC设备的概率相当高。为了突破这个限制,很多设备使用了双重地址——7位地址加引脚地址(external configuration pins)。IIC 标准也预知了这种限制,提出10位的地址方案。
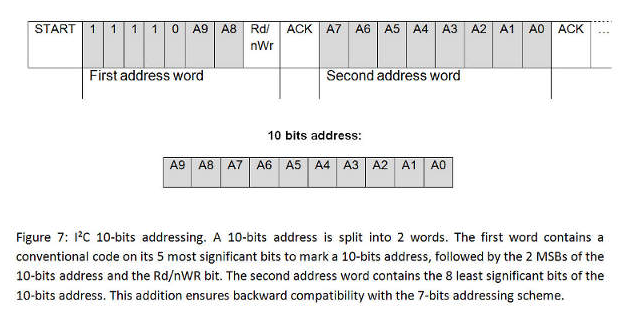
10位的地址方案对 IIC协议的影响有两点:
§ 第一,地址帧为两个字节长,原来的是一个字节;
§ 第二,第一个字节前五位最高有效位用作10位地址标识,约定是“11110”。
除了10位地址标识,标准还预留了一些地址码用作其它用途,如下表:
时钟拉伸
在 IIC 通信中,主设备决定了时钟速度。因为时钟脉冲信号是由主设备显式发出的。但是,当从设备没办法跟上主设备的速度时,从设备需要一种机制来请求主设备慢一点。这种机制称为时钟拉伸,而基于I²C结构的特殊性,这种机制得到实现。当从设备需要降低传输的速度的时候,它可以按下时钟线,逼迫主设备进入等待状态,直到从设备释放时钟线,通信才继续。
高速模式
原理上讲,使用上拉电阻来设置逻辑1会限制总线的最大传输速度。而速度是限制总线应用的因素之一。这也说明为什么要引入高速模式(3.4 Mbps)。在发起一次高速模式传输前,主设备必须先在低速的模式下(例如快速模式)发出特定的“High Speed Master”信号。为缩短信号的周期和提高总线速度,高速模式必须使用额外的I/O缓冲区。另外,总线仲裁在高速模式下可屏蔽掉。更多的信息请参与总线标准文档。
IIC vs SPI: 哪位是赢家?
我们来对比一下IIC 和 SPI的一些关键点:
第一,总线拓扑结构/信号路由/硬件资源耗费
IIC 只需两根信号线,而标准SPI至少四根信号,如果有多个从设备,信号需要更多。一些SPI变种虽然只使用三根线——SCLK, SS和双向的MISO/MOSI,但SS线还是要和从设备一对一根。另外,如果SPI要实现多主设备结构,总线系统需额外的逻辑和线路。用IIC 构建系统总线唯一的问题是有限的7位地址空间,但这个问题新标准已经解决——使用10位地址。从第一点上看,IIC是明显的大赢家。
第二,数据吞吐/传输速度
如果应用中必须使用高速数据传输,那么SPI是必然的选择。因为SPI是全双工,IIC 的不是。SPI没有定义速度限制,一般的实现通常能达到甚至超过10 Mbps。IIC 最高的速度也就快速+模式(1 Mbps)和高速模式(3.4 Mbps),后面的模式还需要额外的I/O缓冲区,还并不是总是容易实现的。
第三,优雅性
IIC 常被称更优雅于SPI。公正的说,我们更倾向于认为两者同等优雅和健壮。IIC的优雅在于它的特色——用很轻盈的架构实现了多主设备仲裁和设备路由。但是对使用的工程师来讲,理解总线结构更费劲,而且总线的性能不高。
SPI的优点在于它的结构相当的直观简单,容易实现,并且有很好扩展性。SPI的简单性不足称其优雅,因为要用SPI搭建一个有用的通信平台,还需要在SPI之上构建特定的通信协议软件。也就是说要想获得SPI特有而IIC没有的特性——高速性能,工程师们需要付出更多的劳动。另外,这种自定的工作是完全自由的,这也说明为什么SPI没有官方标准。IIC和SPI都对低速设备通信提供了很好的支持,不过,SPI适合数据流应用,而IIC更适合“字节设备”的多主设备应用。
小结
在数字通信协议簇中,IIC和SPI常称为“小”协议,相对Ethernet, USB, SATA, PCI-Express等传输速度达数百上千兆字节每秒的总线。但是,我们不能忘记的是各种总线的用途是什么。“大”协议是用于系统外的整个系统之间通信的,“小”协议是用于系统内各芯片间的通信,没有迹象表明“大”协议有必要取代“小”协议。IIC和SPI的存在和流行体现了“够用就好”的哲学。回应文首,IIC和SPI如此的流行,它是任何一位嵌入式工程师必备的工具。
转自:CSDN



一、总线概述
计算机系统是以微处理器为核心的,各器件要与微处理器相连,且必须协调工作,所以在微处理机中引入了总线的概念,各器件共同享用总线,任何时候只能有一个器件发送数据(可以有多个器件同时接收数据) 。
计算机的总线分为控制总线、地址总线和数据总线等三种。而数据总线用于传送数据,控制总线用于传送控制信号, 地址总线则用于选择存储单元或外设。
二、单片机的三总线结构
51系列单片机具有完善的总线接口时序,可以扩展控制对象,其直接寻址能力达到64k( 2的16次方) 。在总线模式下,不同的对象共享总线,独立编址、分时复用总线,CPU 通过地址选择访问的对象,完成与各对象之间的信息传递。
单片机三总线扩展示意如图1 所示。
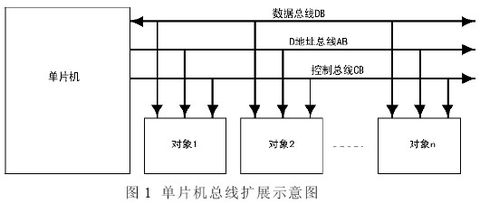
1、数据总线
51 单片机的数据总线为P0 口,P0 口为双向数据通道,CPU 从P0 口送出和读回数据。
2、地址总线
51 系列单片机的地址总线为16 位。
为了节约芯片引脚,采用P0 口复用方式,除了作为数据总线外,在ALE 信号时序匹配下,通过外置的数据锁存器,在总线访问前半周期从P0口送出低8位地址,后半周期从P0 口送出8 位数据。
高8位地址则通过P2 口送出。
3、控制总线
51 系列单片机的控制总线包括读控制信号P3.7 和写控制信号P3.6 等,二者分别作为总线模式下数据读和数据写的使能信号。
三、单片机总线时序分析
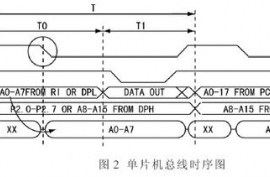
51 单片机总线时序如图2 所示。
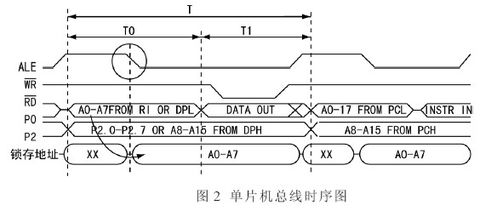
从图2 中可以看出,完成一次总线( 读写) 操作周期为T,P0 口分时复用,在T0 期间,P0 口送出低8 位地址,在ALE 的下降沿完成数据锁存,送出低8位地址信号。在T1 期间,P0 口作为数据总线使用,送出或读入数据,数据的读写操作在读、写控制信号的低电平期间完成。
需要注意的是,在控制信号( 读、写信号) 有效期间,P2 口送出高8位地址,配合数据锁存器输出的低8 位地址,实现16 位地址总线,即64kB 范围的内的寻址。
由于CPU不可能同时执行读和写操作,所以读、写信号不可能同时有效。
四、常见单片机编址电路
1、简单地址扩展
51 单片机的P2 口可以直接作为高8位地址总线使用,在一些简单系统电路中,常使用P2口直接编址驱动。
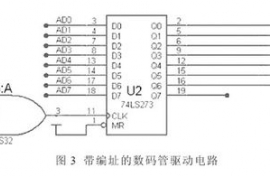
下面以使用数据缓冲器74LS273 驱动数码显示为例,分析P2 口编址驱动的静态数码显示电路的设计。
一位LED 数码显示单元电路如图3 所示。
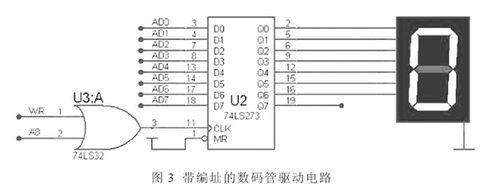
WR 与A8( P2.0) 相或提供74LS273的时钟信号,当执行“MOVX @DPTR,A”指令时,地址信息由DPTR 寄存器确定,会出现有效的写信号WR,只有当地址A8 为满足“0”时,写信号才可以作为74LS273 的时钟信号输入,完成数据锁存。
P2 口为A8~A15 的8 位地址线,很容易扩展到8 只LED 数码管,WR 信号分别与A8~A15 按或关系连接,每位地址线均为低电平有效,即可实现8 个有效地址。
该方案电路简单,但有效地址数太少,不适用于复杂系统设计。
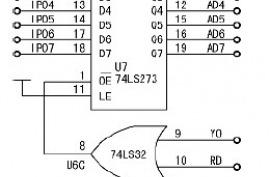
2、低8 位地址锁存
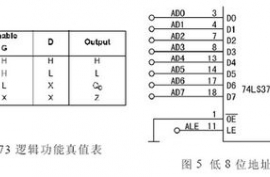
通常的设计电路是使用8D 锁存器74LS373 实现地址锁存,74HC573 与之逻辑功能相同,只是引脚布局不一样,使用74HC573 布线更容易。
74LS373 真值表如图4所示。
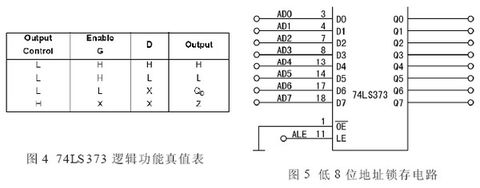
在输出允许OE 为L、控制使能LE 为H 时,输出为跟随状态;
OE 为L、LE 为L 时,输出为保持状态。
地址锁存电路如图5 所示。OE 接地,LE 接单片机的ALE脚将产生满足时序的低8 位地址信号。
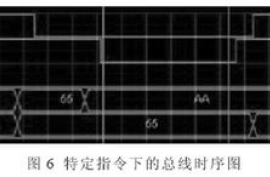
执行以下三条指令会得到如图6所示的时序图。
MOV DPTR,# 0FF55H; 低8 位地址为55H
MOV A,# 0AAH; 待发送数据0AAH→A( 55H 取反)
MOVX,@DPTR,A; A 中的0AAH送地址为0FF55H 的对象中会。
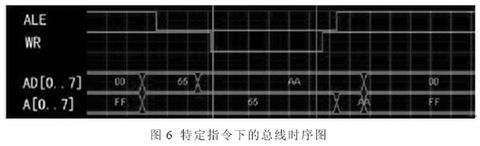
从图6 中可以看出,P0 口先送55H,在ALE 下降沿实现地址锁存,随后送出数据0AAH,在WR 有效( 低电平) 期间锁存器输出低8 位地址55H,P0 口送出数据0AAH。
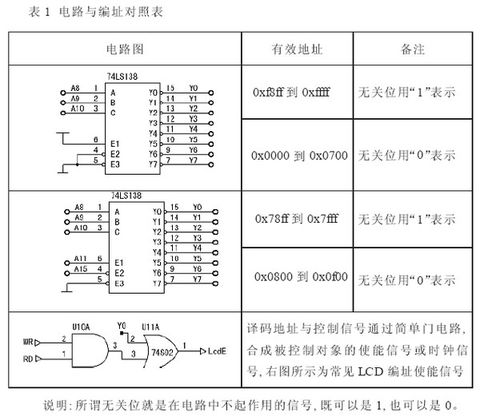
3、带译码器的复杂地址接口电路
理论上高8 位地址线可以产生256 个有效地址,如何实现地址“扩展”呢? 地址扩展准确描述是地址译码,例如3 根地址线可以译码成8 个地址,4根译码成16 个有效地址。这里选择3-8 译码器实现地址译码,电路图以及对应的编址如表1 所示。
五、单片机总线编址电路实例
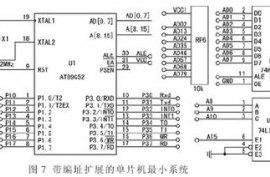
带总线扩展接口的单片机系统,包括外部32k RAM 扩展、LCD1602 接口、输入输出口。
带编址扩展的单片机最小系统电路如图7 所示。
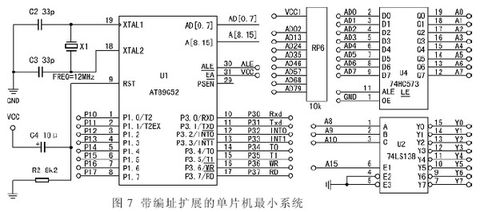
使用74HC573 锁存低8 位地址;74138 实现8 个地址扩展,74138 的A、B、C 接A8 ~A10,E1 接A15, E2、E3 接地常有效,得到0F8FFH 到0FFFFH8 个地址( 无关位用1 表示) 或者8000H 到8700H( 无关位用0 表示) 。
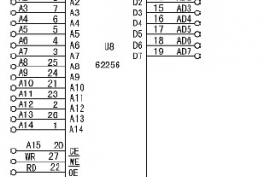
32k RAM 接口如图8 所示。
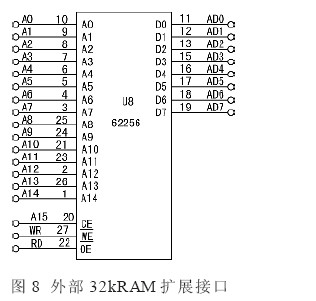
D0~D7 接数据总线P0 口,地址线A0~A14接单片机地址总线低15 位,单片机地址线A15 接RAM 片选信号,低电平有效,这样RAM 地址分配从0000H 到7FFFH,与74138 译码地址不冲突。
LCD1602 接口电路如图9 所示。
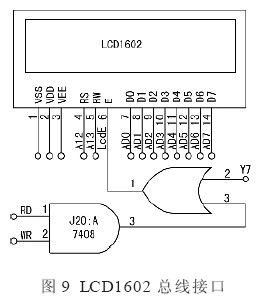
RS、RW 分别接A12、A13,使能信号编址为Y7,这样LCD 的四个驱动地址( 数据读写和命令读写) 为0CFFFH 到0FFFFH ( 无关位为1) 或者8700H 到0B700H( 无关位为0)。
有些时候单片机引脚不够用,还要进行扩展,输入口扩展电路如图10 所示。
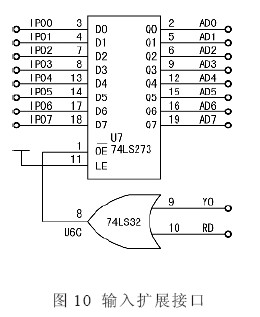
利用74HC573( 74LS373) 的高阻态功能,将其输出Q0~Q7 接P0 口,在满足总线地址读操作中,可以把输入InPORT的数据读入单片机的累加器,地址为0F8FFH 或8000H。
输出口扩展电路如图11 所示。
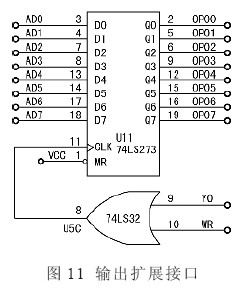
利用74LS273 数据锁存功能,在满足总线地址写操作中,可以把单片机累加器里的数据写入273 锁存输出,地址为0F8FFH 或8000H。由于所用控制总线不同,可以和输入共用地址。
六、结束语
总线扩展是设计单片机控制电路必须掌握的技术,大量的特殊功能IC都支持总线接口, 如ADC0809,TLC7528,DDS 器件AD9851 等。
总线接口的要点就是在严格的控制时序下,总线被分时复用,以实现复杂系统设计。
转自 51单片机总线时序 - 电子技术基础知识 - 21IC中国电子网 http://www.21ic.com/jichuzhishi/mcu/shixu/2013-02-27/159327.html




SPI,是英语Serial Peripheral Interface的缩写,顾名思义就是串行外围设备接口。SPI,是一种高速的,全双工,同步的通信总线,并且在芯片的管脚上只占用四根线,节约了芯片的管脚,同时为PCB的布局上节省空间,提供方便,正是出于这种简单易用的特性,现在越来越多的芯片集成了这种通信协议。
SPI是一个环形总线结构,由ss(cs)、sck、sdi、sdo构成,其时序其实很简单,主要是在sck的控制下,两个双向移位寄存器进行数据交换。
上升沿发送、下降沿接收、高位先发送。
上升沿到来的时候,sdo上的电平将被发送到从设备的寄存器中。
下降沿到来的时候,sdi上的电平将被接收到主设备的寄存器中。
假设主机和从机初始化就绪:并且主机的sbuff=0xaa (10101010),从机的sbuff=0x55 (01010101),下面将分步对spi的8个时钟周期的数据情况演示一遍(假设上升沿发送数据)。
---------------------------------------------------
脉冲 主机sbuff 从机sbuff sdi sdo
---------------------------------------------------
0 00-0 10101010 01010101 0 0
---------------------------------------------------
1 0--1 0101010x 10101011 0 1
1 1--0 01010100 10101011 0 1
---------------------------------------------------
2 0--1 1010100x 01010110 1 0
2 1--0 10101001 01010110 1 0
---------------------------------------------------
3 0--1 0101001x 10101101 0 1
3 1--0 01010010 10101101 0 1
---------------------------------------------------
4 0--1 1010010x 01011010 1 0
4 1--0 10100101 01011010 1 0
---------------------------------------------------
5 0--1 0100101x 10110101 0 1
5 1--0 01001010 10110101 0 1
---------------------------------------------------
6 0--1 1001010x 01101010 1 0
6 1--0 10010101 01101010 1 0
---------------------------------------------------
7 0--1 0010101x 11010101 0 1
7 1--0 00101010 11010101 0 1
---------------------------------------------------
8 0--1 0101010x 10101010 1 0
8 1--0 01010101 10101010 1 0
---------------------------------------------------
这样就完成了两个寄存器8位的交换,上面的0--1表示上升沿、1--0表示下降沿,sdi、 sdo相对于主机而言的。根据以上分析,一个完整的传送周期是16位,即两个字节,因为,首先主机要发送命令过去,然后从机根据主机的名准备数据,主机在下一个8位时钟周期才把数据读回来。
SPI总线是Motorola公司推出的三线同步接口,同步串行3线方式进行通信:一条时钟线SCK,一条数据输入线MOSI,一条数据输出线MISO;用于 CPU与各种外围器件进行全双工、同步串行通讯。
SPI主要特点有:可以同时发出和接收串行数据;可以当作主机或从机工作;提供频率可编程时钟;发送结束中断标志;写冲突保护;总线竞争保护等。
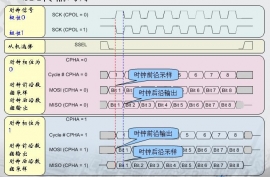
SPI总线有四种工作方式(SP0, SP1, SP2, SP3),其中使用的最为广泛的是SPI0和SPI3方式。
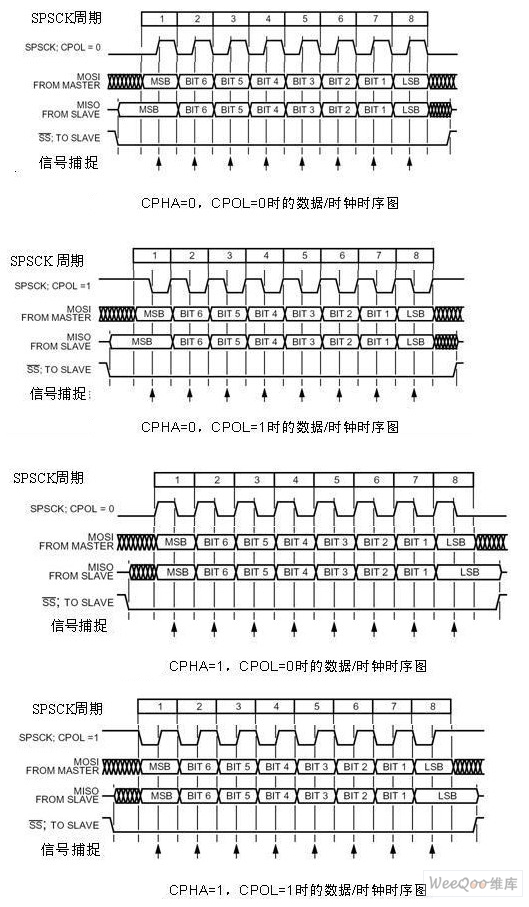
SPI模块为了和外设进行数据交换,根据外设工作要求,其输出串行同步时钟极性和相位可以进行配置,时钟极性(CPOL)对传输协议没有重大的影响。如果CPOL=0,串行同步时钟的空闲状态为低电平;如果CPOL=1,串行同步时钟的空闲状态为高电平。时钟相位(CPHA)能够配置用于选择两种不同的传输协议之一进行数据传输。如果 CPHA=0,在串行同步时钟的第一个跳变沿(上升或下降)数据被采样;如果CPHA=1,在串行同步时钟的第二个跳变沿(上升或下降)数据被采样。 SPI主模块和与之通信的外设音时钟相位和极性应该一致。
SPI时序图详解-SPI接口在模式0下输出第一位数据的时刻
SPI接口在模式0下输出第一位数据的时刻
SPI接口有四种不同的数据传输时序,取决于CPOL和CPHL这两位的组合。图1中表现了这四种时序,时序与CPOL、CPHL的关系也可以从图中看出。
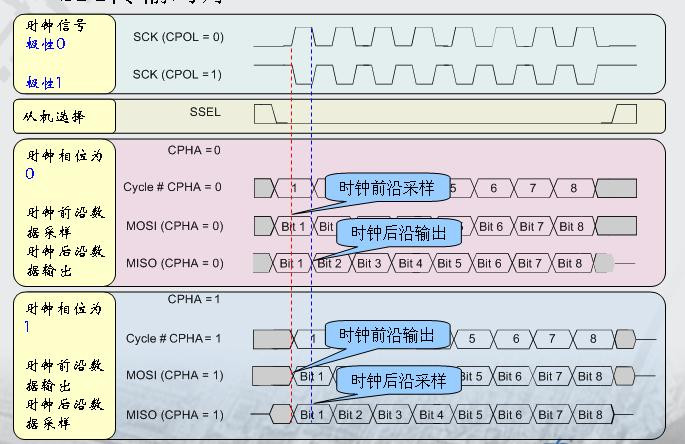
CPOL是用来决定SCK时钟信号空闲时的电平,CPOL=0,空闲电平为低电平,CPOL=1时,空闲电平为高电平。CPHA是用来决定采样时刻的,CPHA=0,在每个周期的第一个时钟沿采样,CPHA=1,在每个周期的第二个时钟沿采样。
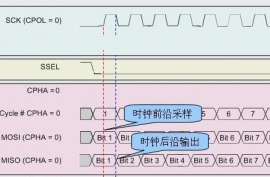
由于我使用的器件工作在模式0这种时序(CPOL=0,CPHA=0),所以将图1简化为图2,
只关注模式0的时序。
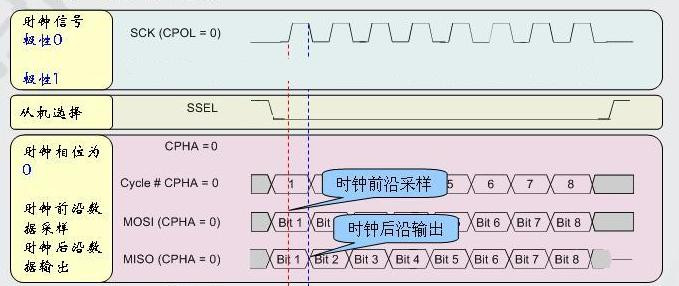
我们来关注SCK的第一个时钟周期,在时钟的前沿采样数据(上升沿,第一个时钟沿),在时钟的后沿输出数据(下降沿,第二个时钟沿)。首先来看主器件,主器件的输出口(MOSI)输出的数据bit1,在时钟的前沿被从器件采样,那主器件是在何时刻输出bit1的呢?bit1的输出时刻实际上在SCK信号有效以前,比 SCK的上升沿还要早半个时钟周期。bit1的输出时刻与SSEL信号没有关系。再来看从器件,主器件的输入口MISO同样是在时钟的前沿采样从器件输出的bit1的,那从器件又是在何时刻输出bit1的呢。
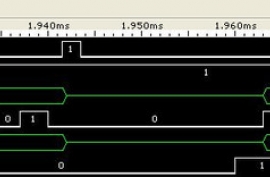
从器件是在SSEL信号有效后,立即输出bit1,尽管此时SCK信号还没有起效。关于上面的主器件和从器件输出bit1位的时刻,可以从图3、4中得到验证。
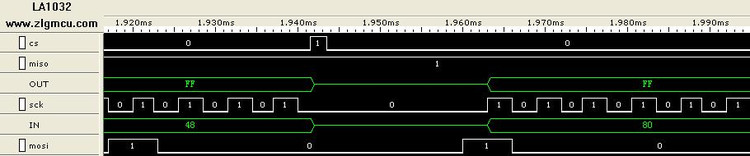
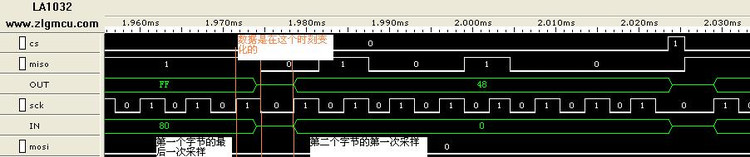
注意图3中,CS信号有效后(低电平有效,注意CS下降沿后发生的情况),故意用延时程序延时了一段时间,之后再向数据寄存器写入了要发送的数据,来观察主器件输出bit1的情况(MOSI)。可以看出,bit1(值为1)是在SCK信号有效之前的半个时钟周期的时刻开始输出的(与CS信号无关),到了SCK的第一个时钟周期的上升沿正好被从器件采样。
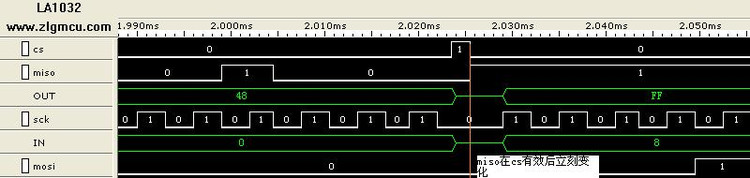
图4中,注意看CS和MISO信号。我们可以看出,CS信号有效后,从器件立刻输出了bit1(值为1)。
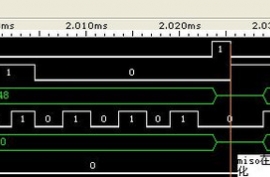
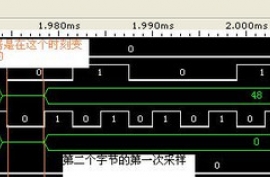
通常我们进行的spi操作都是16位的。图5记录了第一个字节和第二个字节间的相互衔接的过程。第一个字节的最后一位在SCK的上升沿被采样,随后的SCK下降沿,从器件就输出了第二个字节的第一位。
SPI总线协议介绍(接口定义,传输时序)
一、技术性能
SPI接口是Motorola 首先提出的全双工三线同步串行外围接口,采用主从模式(Master Slave)架构;支持多slave模式应用,一般仅支持单Master。
时钟由Master控制,在时钟移位脉冲下,数据按位传输,高位在前,低位在后(MSB first);SPI接口有2根单向数据线,为全双工通信,目前应用中的数据速率可达几Mbps的水平。
-------------------------------------------------------
二、接口定义
SPI接口共有4根信号线,分别是:设备选择线、时钟线、串行输出数据线、串行输入数据线。
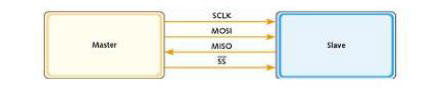
(1)MOSI:主器件数据输出,从器件数据输入
(2)MISO:主器件数据输入,从器件数据输出
(3)SCLK :时钟信号,由主器件产生
(4)/SS:从器件使能信号,由主器件控制
-------------------------------------------------------
三、内部结构
四、传输时序
SPI接口在内部硬件实际上是两个简单的移位寄存器,传输的数据为8位,在主器件产生的从器件使能信号和移位脉冲下,按位传输,高位在前,低位在后。如下图所示,在SCLK的下降沿上数据改变,上升沿一位数据被存入移位寄存器。
SPI接口没有指定的流控制,没有应答机制确认是否接收到数据。
来源:IT点滴

一、什么是AMBA总线
AMBA总线规范是ARM公司提出的总线规范,被大多数SoC设计采用,它规定了AHB (Advanced High-performance Bus)、ASB (Advanced System Bus)、APB (Advanced Peripheral Bus)。AHB用于高性能、高时钟频率的系统结构,典型的应用如ARM核与系统内部的高速RAM、NAND FLASH、DMA、Bridge的连接。APB用于连接外部设备,对性能要求不高,而考虑低功耗问题。ASB是AHB的一种替代方案。
二、AHB
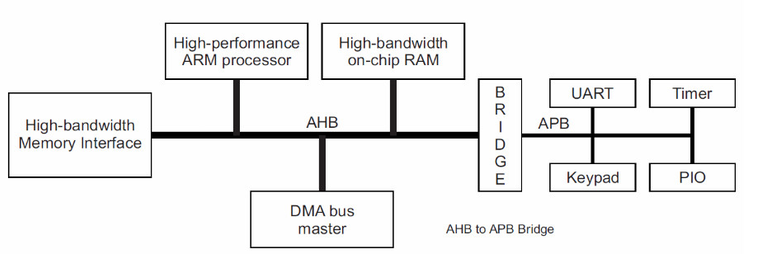
AHB总线的强大之处在于它可以将微控制器(CPU)、高带宽的片上RAM、高带宽的外部存储器接口、DMA总线master、各种拥有AHB接口的控制器等等连接起来构成一个独立的完整的SOC系统,不仅如此,还可以通过AHB-APB桥来连接APB总线系统。AHB可以成为一个完整独立的SOC芯片的骨架。
下图是一个典型的AHB系统总线的结构示意图
三、APB
主要应用在低带宽的外设上,如UART、 I2C,它的架构不像AHB总线是多主设备的架构,APB总线的唯一主设备是APB桥(与AXI或APB相连),因此不需要仲裁一些Request/grant信号。APB的协议也十分简单,甚至不是流水的操作,固定两个时钟周期完成一次读或写的操作。其特性包括:两个时钟周期传输,无需等待周期和回应信号,控制逻辑简单,只有四个控制信号。APB上的传输可用如图所示的状态图来说明。
1、系统初始化为IDLE状态,此时没有传输操作,也没有选中任何从模块。
2、当有传输要进行时,PSELx=1,,PENABLE=0,系统进入SETUP状态,并只会在SETUP状态停留一个周期。当PCLK的下一个上升沿到来时,系统进入ENABLE状态。
3、系统进入ENABLE状态时,维持之前在SETUP状态的PADDR、PSEL、PWRITE不变,并将PENABLE置为1。传输也只会在ENABLE状态维持一个周期,在经过SETUP与ENABLE状态之后就已完成。之后如果没有传输要进行,就进入IDLE状态等待;如果有连续的传输,则进入SETUP状态。
来源:feipeng8848

1.SPI总线简介
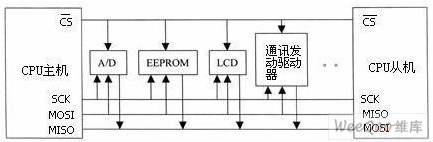
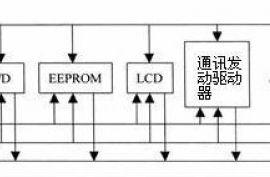
SPI(serial peripheral interface,串行外围设备接口)总线技术是Motorola公司推出的一种同步串行接口。它用于CPU与各种外围器件进行全双工、同步串行通讯。它只需四条线就可以完成MCU与各种外围器件的通讯,这四条线是:串行时钟线(CSK)、主机输入/从机输出数据线(MISO)、主机输出/从机输入数据线(MOSI)、低电平有效从机选择线CS。当SPI工作时,在移位寄存器中的数据逐位从输出引脚(MOSI)输出(高位在前),同时从输入引脚(MISO)接收的数据逐位移到移位寄存器(高位在前)。发送一个字节后,从另一个外围器件接收的字节数据进入移位寄存器中。即完成一个字节数据传输的实质是两个器件寄存器内容的交换。主SPI的时钟信号(SCK)使传输同步。其典型系统框图如下图所示。
2.SPI总线的主要特点
• 全双工;
• 可以当作主机或从机工作;
• 提供频率可编程时钟;
• 发送结束中断标志;
• 写冲突保护;
• 总线竞争保护等。
3.SPI总线工作方式
SPI总线有四种工作方式,其中使用的最为广泛的是SPI0和SPI3方式(实线表示):
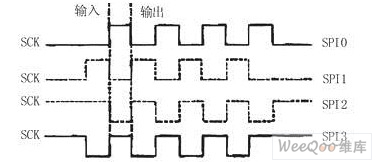
四种工作方式时序分别为:
时序详解:
CPOL:时钟极性选择,为0时SPI总线空闲为低电平,为1时SPI总线空闲为高电平
CPHA:时钟相位选择,为0时在SCK第一个跳变沿采样,为1时在SCK第二个跳变沿采样
工作方式1:
当CPHA=0、CPOL=0时SPI总线工作在方式1。MISO引脚上的数据在第一个SPSCK沿跳变之前已经上线了,而为了保证正确传输,MOSI引脚的MSB位必须与SPSCK的第一个边沿同步,在SPI传输过程中,首先将数据上线,然后在同步时钟信号的上升沿时,SPI的接收方捕捉位信号,在时钟信号的一个周期结束时(下降沿),下一位数据信号上线,再重复上述过程,直到一个字节的8位信号传输结束。
工作方式2:
当CPHA=0、CPOL=1时SPI总线工作在方式2。与前者唯一不同之处只是在同步时钟信号的下降沿时捕捉位信号,上升沿时下一位数据上线。
工作方式3:
当CPHA=1、CPOL=0时SPI总线工作在方式3。MISO引脚和MOSI引脚上的数据的MSB位必须与SPSCK的第一个边沿同步,在SPI传输过程中,在同步时钟信号周期开始时(上升沿)数据上线,然后在同步时钟信号的下降沿时,SPI的接收方捕捉位信号,在时钟信号的一个周期结束时(上升沿),下一位数据信号上线,再重复上述过程,直到一个字节的8位信号传输结束。
工作方式4:
当CPHA=1、CPOL=1时SPI总线工作在方式4。与前者唯一不同之处只是在同步时钟信号的上升沿时捕捉位信号,下降沿时下一位数据上线。
4.SPI总线常见错误
4.1 SPR设定错误
在从器件时钟频率小于主器件时钟频率时,如果SCK的速率设得太快,将导致接收到的数据不正确(SPI接口本身难以判断收到的数据是否正确,要在软件中处理)。
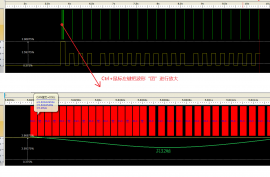
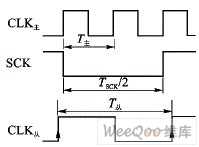
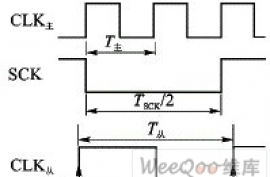
整个系统的速度受三个因素影响:主器件时钟CLK主、从器件时钟CLK从和同步串行时钟SCK,其中SCK是对CLK主的分频,CLK从和CLK主是异步的。要使SCK无差错无遗漏地被从器件所检测到,从器件的时钟CLK从必须要足够快。下面以SCK设置为CLK主的4分频的波形为例,分析同步串行时钟、主时钟和从时钟之间的关系。
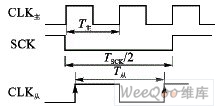
如图4所示,当T从<Tsck/2,即T从<2T主时,无论主时钟和从时钟之间的相位关系如何,在从器件CLK从的上升沿必然能够检测到SCK的低电平,即SCK=0的范围内至少包含一个CLK从的上升沿。
图5中,当T从≥TSCK/2=2T主时,在clk_s的两个上升沿都检测不到SCK的低电平,这样从器件就会漏掉一个SCK。在某些相位条件下,即使CLK从侥幸能检测到SCK的低电平,也不能保证可以继续检测到下一个SCK。只要遗漏了一个SCK,就相当于串行数据漏掉了一个位,后面继续接收/发送的数据就都是错误的了。
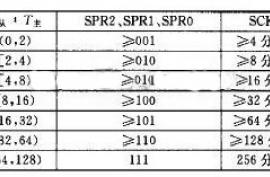
根据以上的分析,SPR和主从时钟比的关系如表1所列。
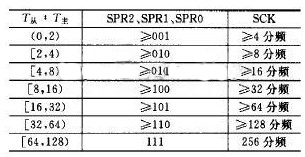
在发送数据之前按照表1对SPR进行设置,SPR设定错误可以完全避免。
4.2 模式错误(MODF)
模式错误表示的是主从模式选择的设置和引脚SS的连接不一致。
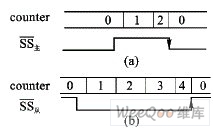
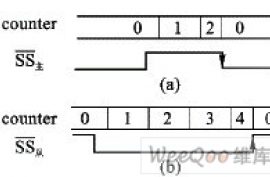
器件工作在主模式的时候(MSTR=1),它的片选信号SS引脚必须接高电平。在发送数据的过程中,如果它的SS从高电平跳至低电平,在SS的下降沿,SPI模块将检测到模式错误,对MODF位置1,强制器件从主模式转入从模式(即令MSTR=0),清空内部计数器counter,并结束正在进行的数据传输,如图6(a)所示。
对从模式(MSTR=0),在没有数据传送的时候,SS高电平表示从器件未被选中,从器件不工作,MISO输出高阻;在数据传输过程中,片选信号SS必须接低电平,且SS不允许跳变。如果SS从低电平跳到高电平,在SS的上跳沿,SPI模块也将检测到模式错误,清空内部计数器counter,并结束正在进行的数据传输。直到SS恢复为低电平,重新使SPEN=1时,才重新开始工作,如图6(b)所示。
4.3 溢出错误(OVR)
溢出错误表示连续传输多个数据时,后一个数据覆盖了前一个数据而产生的错误。
状态标志SPIF表示的是数据传输正在进行中,它对数据的传输有较大的影响。主器件的SPIF有效由数据寄存器的空标志SPTE=0产生,而从器件的SPIF有效则只能由收到的第一个SCK的跳变产生,且又由于从器件的SPIF和主器件发出的SCK是异步的,因此从器件的传输标志SPIF从相对于主器件的传输标志SPIF主有一定的滞后。如图7所示,在主器件连续发送两个数据的时候将有可能导致从器件的传输标志和主器件下一个数据的传输标志相重叠(图7中虚线和阴影部分),第一个收到的数据必然被覆盖,第二个数据的收/发也必然出错,产生溢出错误。
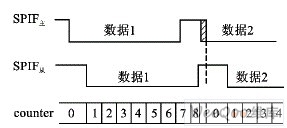
通过对从器件的波形分析发现,counter=8后的第一个时钟周期,数据最后一位的传输已经完成。在数据已经收/发完毕的情况下,counter=8状态的长短对数据的正确性没有影响,因此可以缩短counter=8的状态,以避免前一个SPIF和后一个SPIF相重叠。这样,从硬件上避免了这一阶段的溢出错误。
但是,如果从器件工作速度不够快或者软件正在处理其他事情,在SPI接口接收到的数据尚未被读取的情况下,又接收到一个新的数据,溢出错误还是会发生的。此时,SPI接口保护前一个数据不被覆盖,舍弃新收到的数据,置溢出标志OVR=1;另外发出中断信号(如果该中断允许),通知从器件及时读取数据。
4.4 偏移错误(OFST)
SPI接口一般要求从器件先工作,然后主器件才开始发送数据。有时在主器件往外发送数据的过程中,从器件才开始工作,或者SCK受到外界干扰,从器件未能准确地接收到8个SCK。如图8所示,从器件接收到的8个SCK其实是属于主器件发送相邻的两个数据的SCK主。这时,主器件的SPIF和从器件的SPIF会发生重叠,数据发生了错位,从器件如果不对此进行纠正的话,数据的接收/发送便一直地错下去。

在一个数据的传输过程中,SPR是不允许改变的,即SCK是均匀的,而从图5可以看出,从器件接收到的8个SCK并不均匀,它们是分别属于两个数据的,因此可以计算SCK的占空时间来判断是否发生了偏移错误。经分析,正常时候SCK=1时的时钟周期数n的取值满足如下关系:

但由于主从时钟之间是异步的,并且经过了取整,所以正常时候SCK=1时的时钟周期计数值COUNT应满足:

比如在图5中,COUNT的最大值COUNT(max)=2或者1,都可认为是正常的。但当出现COUNT(max)=8时,可以判定出现了偏移错误。在实际设计中,先记录下第一个COUNT(max)的值,如果后面又出现与记录值相差1以上的COUNT(max)出现,可知有偏移错误OFST发生。SPI接口在“不均匀”的地方令SPIF=1,然后准备等待下一个数据的第一个SCK。其中COUNT的位数固定为8位,为了避免溢出时重新从00H开始计数,当计数达到ffH时停止计数。
4.5 其他错误
设定不当,或者受到外界干扰,数据传输难免会发生错误,或者有时软件对错误的种类判断不清,必须要有一种方法强制SPI接口从错误状态中恢复过来。在SPI不工作,即SPEN=0的时候,清除SPI模块内部几乎所有的状态(专用寄存器除外)。如果软件在接收数据的时候,能够发现数据有错误,无论是什么错误,都可以强制停止SPI的工作,重新进行数据传输。例如,在偏移错误(OFST)中,如果SPR2、SPR1和SPR0的设置适当,也可以使SCK显得比较“均匀”。SPI接口硬件本身不可能检测到有错误,若用户软件能够发现错误,这时就可以强制停止SPI的传输工作,这样就可以避免错误一直持续下去。
在应用中,如果对数据的正确性要求较高,除了要在软件上满足SPI接口的时序要求外,还需要在软件上作适当的处理。
5.设计SPI总线控制器
目前的项目中使用了SPI总线接口的FLASH存储器存储图像数据。FLASH的SPI总线频率高达66M,但MCU的频率较低,晶振频率7.3728M,SPI最大频率为主频1/2。对于320*240*16的图像读取时间为333ms,而且还忽略了等待SPI传输完成、写显存、地址坐标设定等时间。实际测试约为1s。成为GUI设计的极大瓶颈。由于TFT驱动是自己FPGA设计的,资源尚有余量,决定把SPI控制器(主)及写图像部分逻辑放入FPGA中用硬件完成。
首先接触到的是SPI的SCK时钟频率问题。FPGA的频率是48M,未使用PLL。能否以此频率作为SCK频率呢?要知道所有的MCU提供的SPI频率最大为主频的1/2!为什么呢?查过一些资料后发现,SPI从机接收数据并不是以SCK为时钟的,而是以主频为时钟对SCK和MISO进行采样,由采样原理得知SCK不能大于1/2主频,也就有了MCU提供最大master频率是1/2主频,最大slaver频率是1/4主频。FPGA在只作为主机时能否实现同主频一样频率的SCK呢??答案貌似是肯定的!但我还是有点担心,用组合逻辑控制SCK会不会出现较大毛刺影响系统稳定性呢?
转自: 极客先锋






位数指CPU处理的数据的宽度,参与运算的寄存器的数据长度。
如果总线宽度与CPU一次处理的数据宽度相同,则这个宽度就是所说的单片机位数。
如果总线宽度与CPU一次处理的数据宽度不同:
(1)总线宽度小于CPU一次处理的数据宽度,则以CPU的数据宽度定义单片机的位数,但称为准多少位。比如著名的Intel 8088,CPU是16位但总线是8位,所以它是准16位。
(2)总线宽度小于CPU一次处理的数据宽度,则以CPU的数据宽度定义单片机的位数。
少位宽不是指总线宽度,也不是存储器的宽度,像51单片机的地址总线是16位的,但是它是8位机。像ARM的存储器也有八位的,但是它是32位机。而是指CPU处理的数据的宽度,也就是CPU一次数据的吞吐量。比如同一条指令:MOV R0 R2
在51单片机里面,R0和R2都是8位的,所以51的CPU一次只能处理8位数据。
在ARM里面,R0和R2是32位的,所以ARM的CPU一次能处理32位数据。这就是区别。
有啥复杂的, 一句话:参与运算的寄存器的数据长度。
8位单片机的数据总线宽度为8位,通常直接只能处理8位数据;
16位单片机的数据总线宽度为16位,通常可直接处理8位或16位数据。
最本质的区别是内部CPU的字长不同,即CPU处理数据的最大位数不同,有8位和16位CPU的区别,你可以认为是ALU、寄存器的字长等。有的32位DSP芯片其外部接口数据总线是16位的,根据这个来判断是不行的
速度上有区别,取决于CPU、寄存器的字长。8位单片机不能直接处理16位数据,要按照8位数据来处理,要分几个过程来完成。而16位单片机,可直接处理16们数据,因为其ALU,寄存器等都是16位的,可一次完成8位单片机要多步完成的动作,特别是对于数据处理,16位单片机有它的优势。而且16位单片机大多数据接口都为16位。
说简单了就是16位的比8位快,8位的单片机发展时间长,且价格偏低。最重要的是在许多的应用场合能够胜任开发的任务。16位的单片机在功能上要比8位的强大很多,只在需要的场合使用。
你知道2进制吧,你是否知道单片机在进行计算的时候统统是2进制数的运算。所以8位单片机和16位单片机的最根本区别就是,8位单片机可以同时进行2个8位的2进制数相加,而16位单片机则大一倍,可以同时让2个16位的2进制数相加。
CPU能同时处理二进制数的位数是多少位,就称其是多少位的计算机。也有数据总线的位数是CPU位数的一半的情况,就称其是准多少位的计算机。比如CPU是16位,数据总线也是16位,则是16位计算机;CPU是16位,数据总线也是8位,则是准16位计算机。
原来是16位单片机想改用8位的替代是可以的,但电路及程序都要做相应改变,并且改为8位机后,在功能和速度上要能够满足你工作的需要才行。
来源: 嵌入式资讯精选

