
引言与说明
现有的制冷技术可以分为两大类,第一类是较为传统的压缩气体制冷技术,主要特征为使用易压缩气体作为热介质,利用气体变化实现热量转移,常见的工作气体有氨气、二氧化碳、氟利昂等,这些气体泄露后会造成大气环境污染。第二类则为近些年来新兴的清洁制冷技术,常见的有半导体制冷技术和磁制冷技术,半导体制冷又称为温差电制冷,是一种发展较为成熟的新型制冷方式。
现有的国产新冠疫苗,保存温度大都在2-8℃之间,其他常见疫苗也保存在这个温度区间,例如,狂犬病疫苗、百白破疫苗、甲肝疫苗、脊髓灰质炎糖丸、麻疹疫苗等。
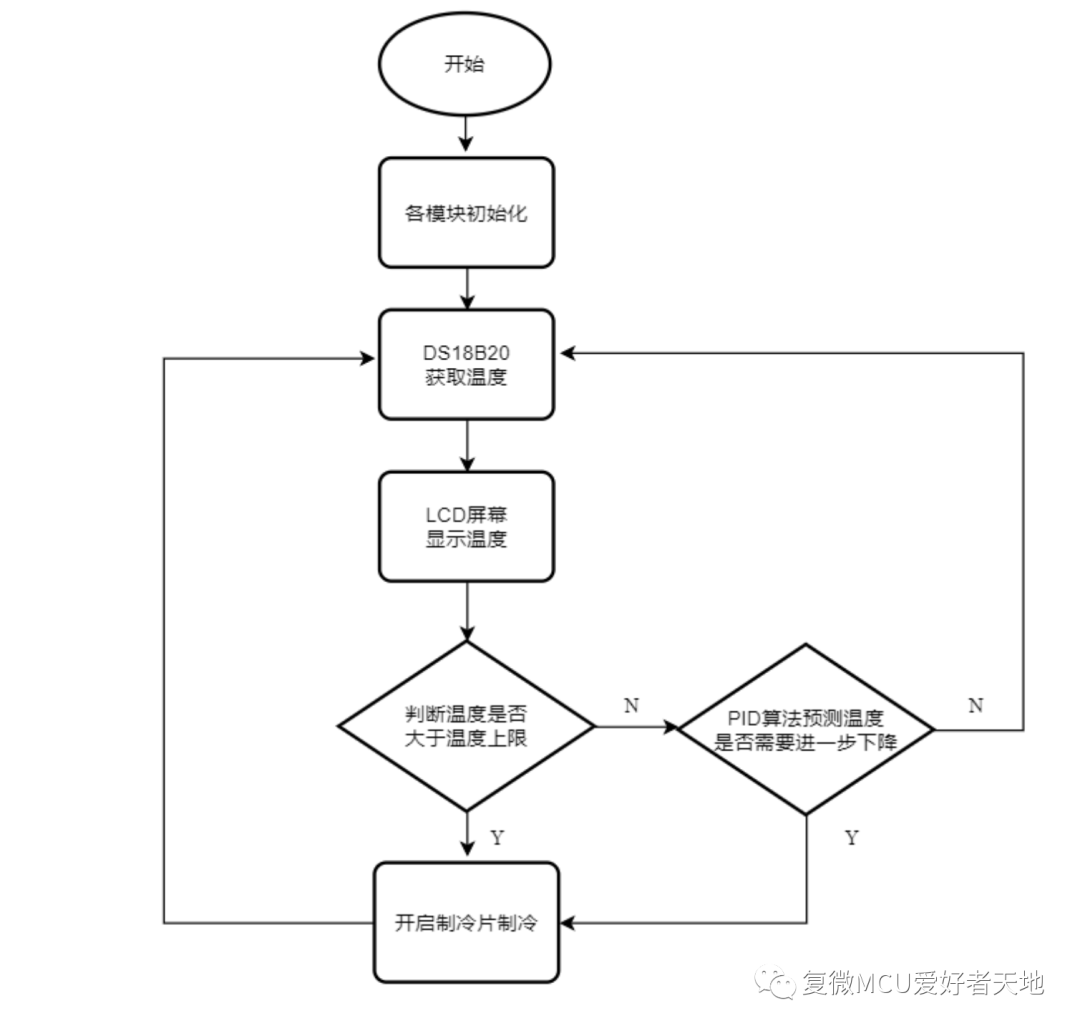
本课题设计了一款用于保存疫苗的半导体制冷设备,硬件系统包括主控电路、制冷电路、开关检测电路、显示电路、照明电路等模块;软件系统包括主程序、DS18B20传感器驱动函数、LCD屏幕驱动函数、开关检测函数、PID算法函数,制冷片控制函数等部分。

主控芯片
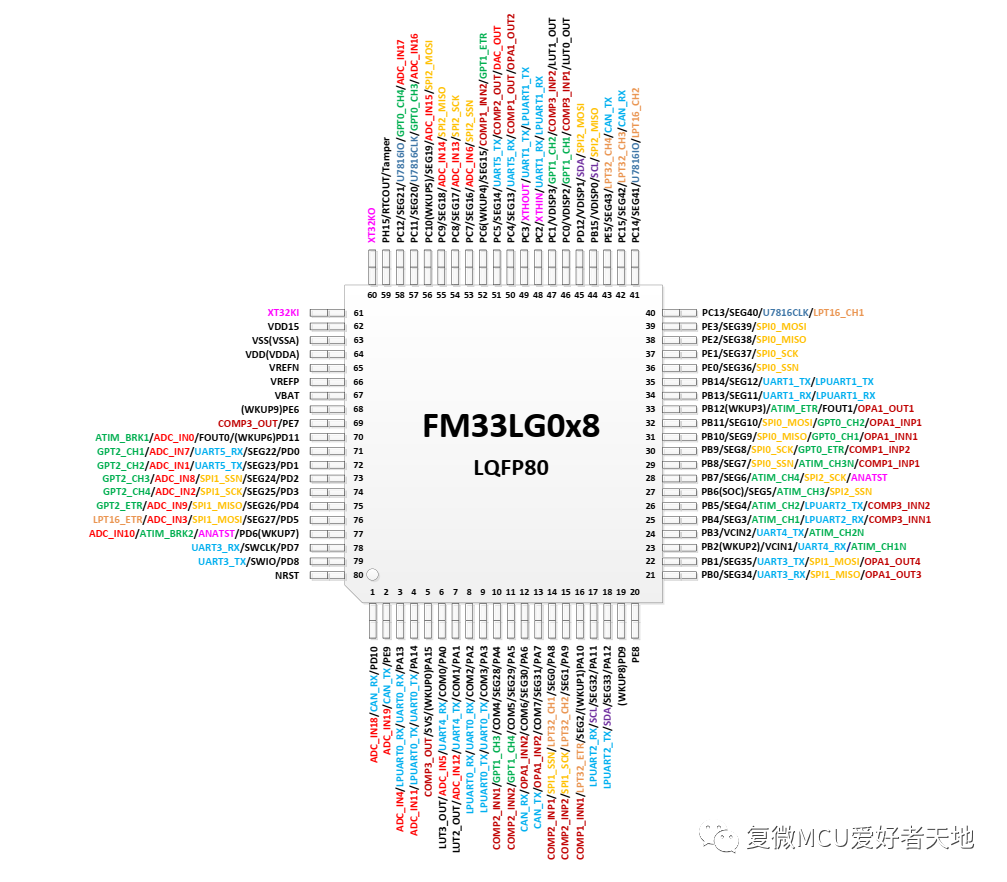
处理器内核:ARM Cortex-M0架构,支持MPU,支持用户/特权模式,64MHz主频,SWD接口,24bit Systick定时器。
低功耗平台:典型运行功耗130uA/MHz@48MHz,Sleep模式3.3uA typ,DeepSleep模式,RTC走时+全部RAM保持+CPU内核保持,1.5uA typ。
大容量储存器:256KB Flash空间,32 KB RAM,100000次Flash寿命,自带用户代码保护功能。
丰富的模拟外设:高可靠、可配置BOR电路,超低功耗PDR电路可编程电源监测模块,3个低功耗模拟比较器,12bit 2Msps SAR-ADC,12bit 1Msps DAC,内置基准电压产生电路,高精度温度传感器(±2℃)。
通用通信接口:5个UART接口,3个LPUART接口,1个7816智能卡接口,3个主从模式SPI,1个主从模式I2C,1个CAN2.0B接口,7通道外设DMA,可编程CRC校验模块。
定时器资源:一个16bit高级定时器,最高PWM分辨率120MHz,3个16bit通用定时器,1个32bit基本定时器,1个16bit基本定时器,1个24bit Systick,1个32bit低功耗定时器,1个16bit低功耗定时器,2个看门狗定时器,一个低功耗实时时钟日历(RTCC)。
LCD资源:芯片内部集成LCD接口,最大支持4COM×44SEG/ 6COM×42SEG/ 8COM×40SEG三种显示方案,支持休眠显示。
传感器工作介绍
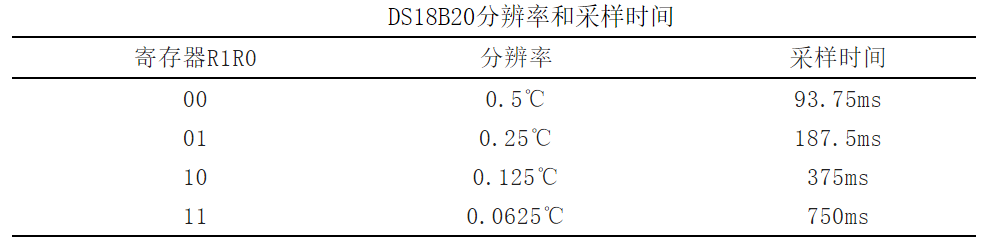
本设计使用DS18B20温度传感器。该传感器由DALLAS公司生产,工作电压为3.3~5.5V,温度测量范围为-55℃~125℃,温度测量精度为1℃,分辨率有多种选择,分别对应多种采样时间,如下表所示。
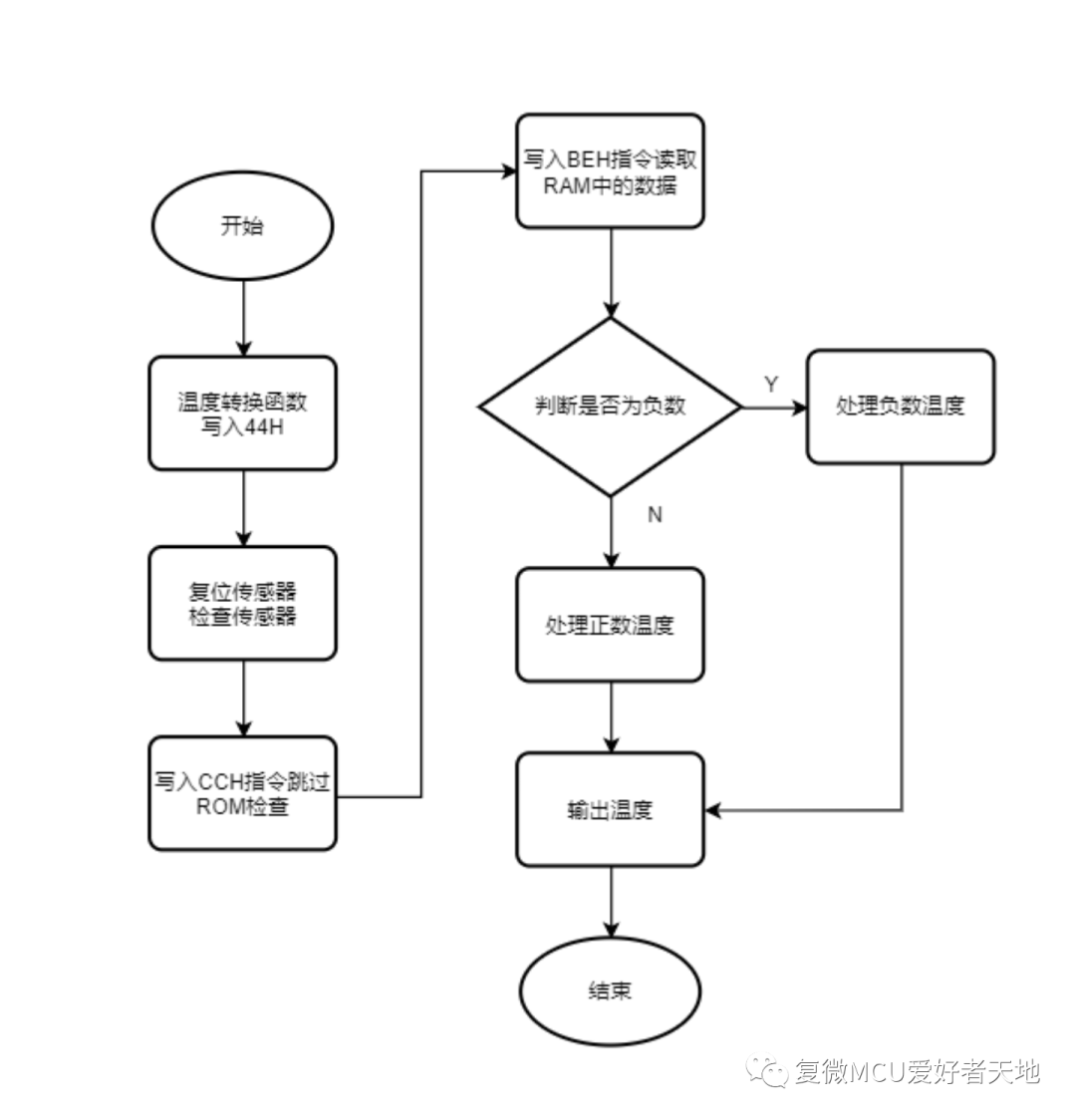
根据传感器芯片手册编写驱动代码,分别有:复位函数、写入函数、读取函数;各函数结构如下:
复位指令:480-960us拉低+15-60us拉高+回传60-240us低电平
读取指令:1us拉低+15us后读取
写入指令:1us拉低+15-60us中读取

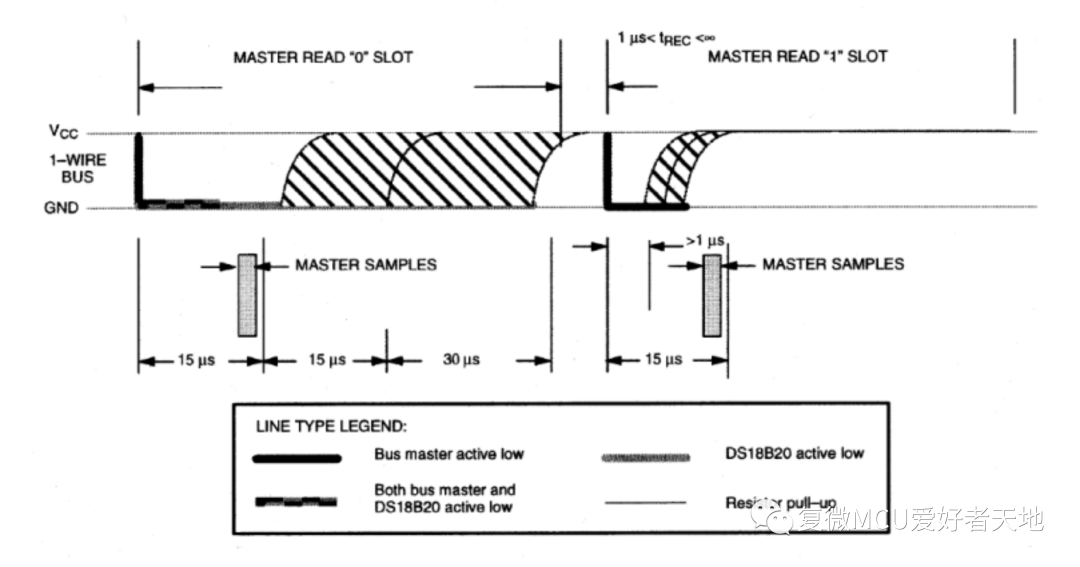
根据时序图的要求,我们采用延迟函数实现电平的延迟,采用GPIO设置函数实现电平的设定。在完成基础函数的搭建后,根据DS18B20传感器的工作要求,即可实现温度数据的获取。
人机交互界面介绍
根据FM33LG048芯片内置的LCD显示接口,本设计采用四端口模式来实现人机交互,通过连接4个控制端口(设计采用PA0-PA3),25个数据端口,将温度数据发送到显示屏上,实现数据的可视化。
温度控制介绍
本设计采用位置型PID算法调节温度,共有三个环节分别为:比例控制环节、积分控制环节、微分控制环节。
比例控制(P,proportion):能够成比例控制偏差信号。当出现偏差信号时,偏差信号和比例增益一起产生作用,因而可以提高系统的反应速度。的大小会直接影响系统稳定性,当参数过大时,系统反应速度会明显提高,但是超调量会增加,很容易产生振荡。当参数过小时,系统反应速度慢且调节效果差,造成大量资源浪费。因而,单纯的比例控制并不能获得稳定的效果,需要加入积分微分环节。
积分控制(I,integral):能够减小系统的稳态误差和静态误差。当出现偏差信号时,积分环节始终会发生作用。参数决定了积分作用的强弱,的大小和积分作用呈反比关系。在积分时间充足的条件下,积分控制可以完全消除静态误差。但是积分控制和比例控制一样,作用太强也会产生超调震荡。
微分控制(D,differential):能够减小系统的动态误差。当出现偏差信号时,微分环节能够给出修正信号,避免偏差信号快速变大带来的调节失效。参数决定了微分修正的大小,当过大时,系统误差变化赶不上修正变化,会产生震荡现象。当输入没有变化时,微分控制不起作用,因此需要和比例控制、积分控制一起使用。
PID控制器具有三者的优点,比例控制器可以提高反应速度,积分控制器消除静态误差、微分控制器预判系统误差发展趋势,选择合适的、、可以实现快速调节输出量。
创新点
1、采用国产单片机芯片FM33LG048完成了半导体制冷系统设计,并制作实物设备完成性能检测实验。
2、开发基于FM33LG048单片机的DS18B20传感器驱动代码。
3、提出不同的使用场景下的制冷方案,从而为不同需求的用户提供个性化方案。


来源:复微MCU爱好者
免责声明:本文为转载文章,转载此文目的在于传递更多信息,版权归原作者所有。本文所用视频、图片、文字如涉及作品版权问题,请联系小编进行处理(联系邮箱:cathy@eetrend.com)。

